嗨,今天我们聊聊操作系统里一个非常核心的机制——进程的调度。
你有没有想过,为什么一台只有一个或几个CPU的电脑,却能同时运行几十上百个程序,让你可以一边听歌一边写文档,后台还在下载文件?
这一切都归功于进程调度。简单来说,就是为了实现进程的并发执行,防止某个程序长时间独占CPU资源,导致其他程序被“饿死”。调度器就像一个交警,指挥着CPU该在哪个时间点去执行哪个进程,确保“雨露均沾”。

调度的三个层级
你是不是以为调度就是CPU简单地决定执行哪个程序?没那么简单。根据资源移动的路径,调度可以分为三级:
- 高级调度(作业调度):负责将程序从硬盘(外存)调入内存,创建对应的进程。比如你双击一个应用程序图标,触发的就是这个调度。
- 中级调度(内存调度):这是一个双向过程,负责在内存和硬盘之间交换进程。当内存紧张时,会把暂时不运行的进程“挂起”(调出到硬盘),为新的进程腾出空间;当这些进程需要再次运行时,再将其“激活”(调入内存)。
- 低级调度(进程调度):这是我们最常理解的那个调度。它直接从内存的就绪队列中挑选一个进程,分配CPU资源给它执行。进程的切换执行,主要就是指这一级。
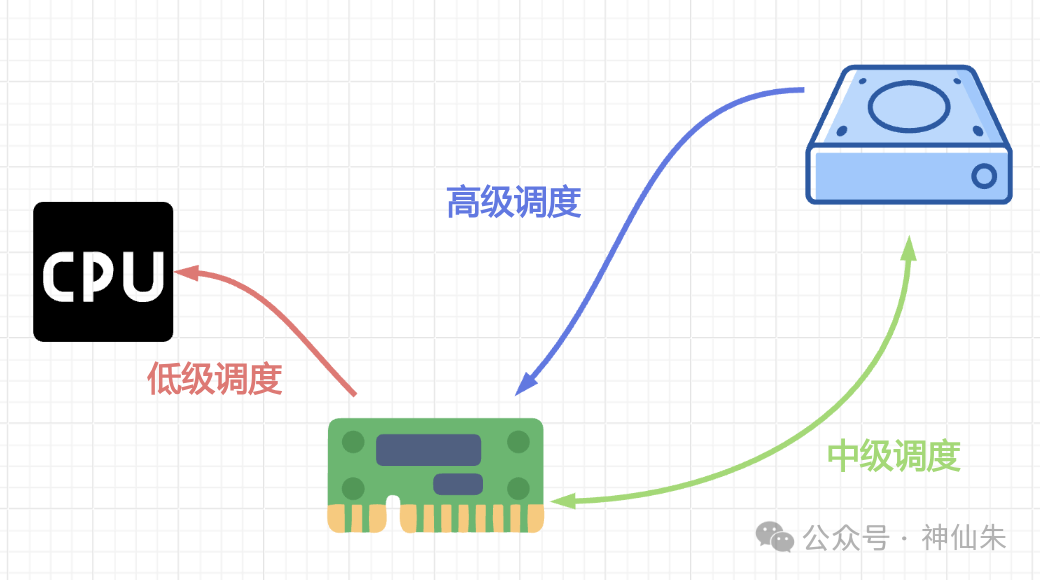
一个进程从生到死,会反复经历这三层调度。至于为什么CPU层面的调度反而叫“低级”,可以理解成这是开销最低的调度。高级调度涉及程序加载、资源分配,开销大;中级调度涉及内外存交换,开销中等;而低级调度通常只需保存和恢复进程的上下文(寄存器状态等),开销最小。
进程状态:调度的直接依据
调度器决定让谁上CPU,总得有个依据吧?这个依据就是进程的状态。CPU不关心进程为什么处于某个状态,它只看结果:阻塞态的就不调度,就绪态的就可以调度。
最简单的模型是三态模型:
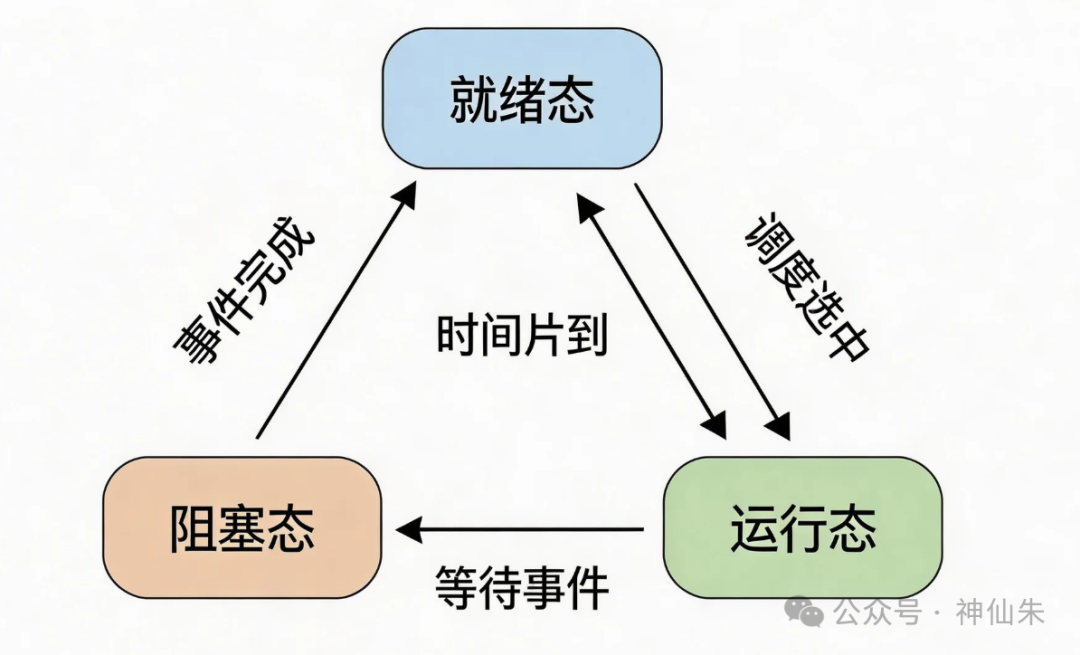
- 就绪态:进程已获得除CPU之外的所有必要资源,只要被调度器选中,就能立刻执行。
- 运行态:进程已获得CPU,其指令正被CPU执行。
- 阻塞态:进程因等待某个外部事件(如I/O操作完成、信号量等)而暂停执行,即使CPU空闲也无法运行。
在操作系统中,更完整的模型是五态模型,它在三态基础上增加了新建态和终止态。
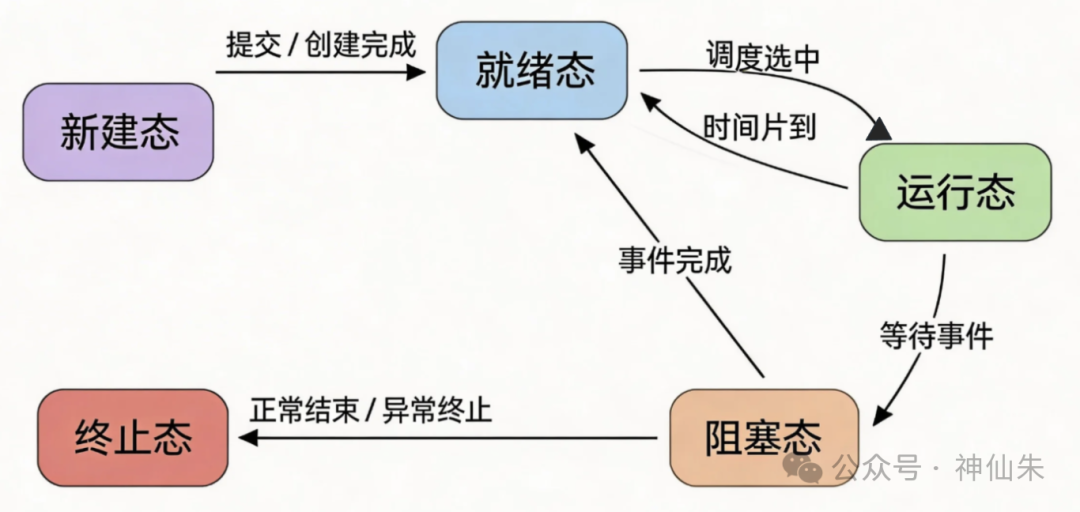
状态之间的转换都是有原因的。例如:
- CPU时间片用完,进程从运行态回到就绪态。
- 进程需要等待某个事件(如I/O),从运行态进入阻塞态。
- 调度器选中某个就绪进程,它就从就绪态进入运行态。
其中,导致状态转换最核心、最关键的因素,就是进程间的同步与互斥。
同步、互斥与信号量
互斥:指某一资源在同一时刻只能被一个进程使用。比如打印机,A在用的时候B就不能用,必须等待。
同步:指进程之间存在依赖关系,一个进程的执行需要等待另一个进程提供数据或信号。比如进程B需要进程A的计算结果。
这两种情况都是导致进程进入阻塞态的主要原因。那么问题来了:进程怎么知道打印机正被占用?怎么知道依赖的数据还没生产出来?
答案就是信号量。它是一个特殊的整型变量,配合两种原子操作P(wait)和V(signal)来工作。
- P操作(申请资源):
S = S - 1。如果结果S < 0,则执行该操作的进程被阻塞。
- V操作(释放资源):
S = S + 1。如果结果S <= 0,则唤醒一个等待该信号的进程。
互斥信号量
用于控制对临界资源的独占访问,初始值通常设为1,代表资源数量。
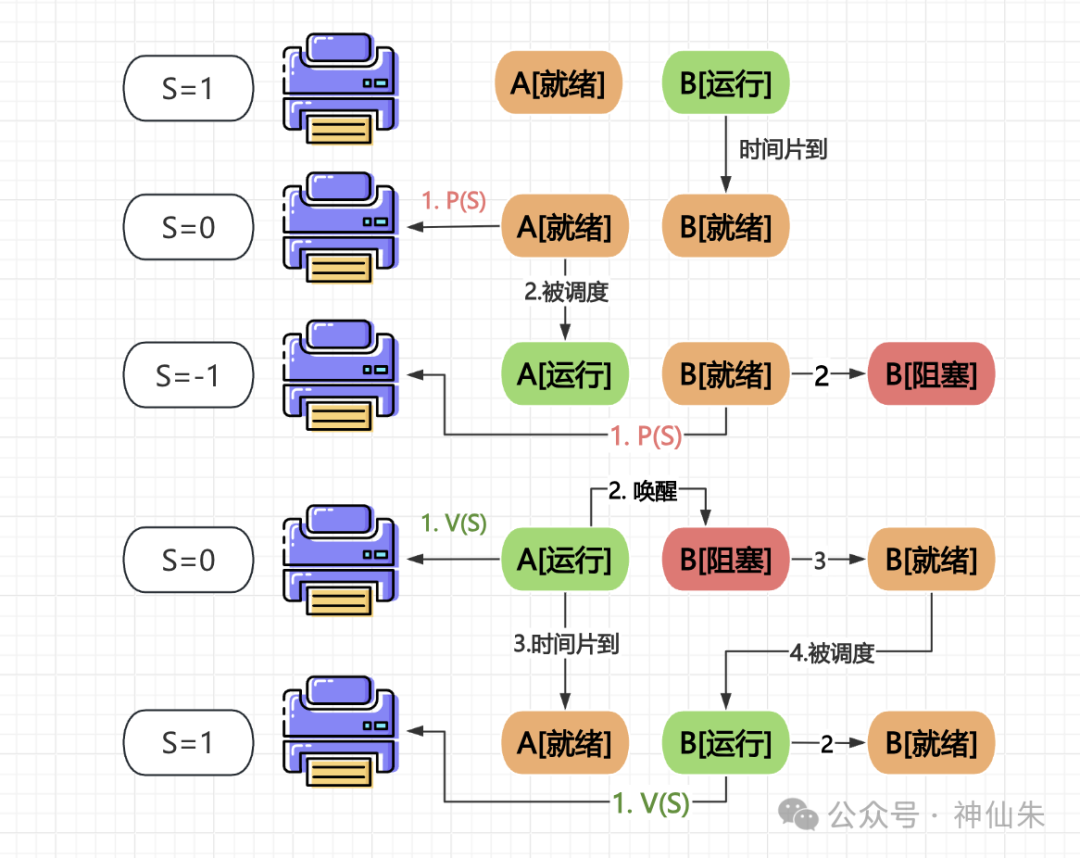
我们来模拟进程A和B互斥使用打印机的流程:
- 初始:打印机空闲,信号量 S = 1。
- 进程A申请使用:执行 P(S),S = 1 - 1 = 0。S >= 0,进程A获得打印机,进入运行态。
- 进程B也想使用:执行 P(S),S = 0 - 1 = -1。S < 0,进程B申请失败,进入阻塞态。
- 进程A用完:执行 V(S),S = -1 + 1 = 0。S <= 0,唤醒等待队列中的进程B。
- 进程B被唤醒,变为就绪态,随后被调度获得CPU,开始使用打印机。
- 进程B用完:执行 V(S),S = 0 + 1 = 1,资源恢复空闲。
这个过程可以用下图清晰展示:
用伪代码表示就是:
ProcessA() {
P(打印机); // 申请资源
//.... 临界区代码
V(打印机); // 释放资源
}
ProcessB() {
P(打印机); // 申请资源
//.... 临界区代码
V(打印机); // 释放资源
}
同步信号量
用于协调进程间的执行顺序,初始值通常设为0。
假设进程A依赖进程B产出的数据:
- 初始:数据不存在,信号量 S = 0。
- 进程A(消费者)先执行:执行 P(S),S = 0 - 1 = -1。S < 0,进程A因数据未就绪而阻塞。
- 进程B(生产者)执行:生产数据,完成后执行 V(S),S = -1 + 1 = 0。S <= 0,唤醒进程A。
- 进程A被唤醒,变为就绪态,获得数据后继续执行。
用伪代码表示:
// A 依赖 B
Process_A() {
P(sync); // 申请资源(等待数据)
// 使用数据....
}
Process_B() {
// 生产数据
V(sync); // 生产完毕,释放资源(通知数据就绪)
}
小结一下:CPU根据进程状态进行调度。而进程状态转换的关键在于同步/互斥,这通过信号量和PV操作这一计算机科学中的经典机制来实现。
CPU调度算法:谁先来,谁先走?
理解了“调度谁”,接下来看“怎么调度”。CPU是如何在就绪队列中挑选下一个幸运儿的呢?这依赖于调度算法。
1. 先来先服务(FCFS)
最简单的算法,就绪队列像一个FIFO(先进先出)队列,谁先来,谁就先被服务。它实现简单,但可能导致“护航效应”:一个长任务会阻塞后面所有短任务的执行,平均等待时间可能很长,对交互式任务不友好。
2. 时间片轮转(RR)
这是实现分时系统的经典算法。每个进程被分配一个固定的时间片。进程用完时间片后,即使没执行完,也会被剥夺CPU,重新排到就绪队列的末尾。
- 时间片大小的权衡:太大则退化为FCFS;太小则进程切换过于频繁,系统开销大。现代系统通常设置在10ms~100ms左右。
- 问题:对所有进程一视同仁,无法区分任务的紧急程度。
3. 优先级调度(Priority Scheduling)
为每个进程分配一个优先级。调度时,选择优先级最高的就绪进程执行。这能很好地区分实时任务(如鼠标响应)和后台任务(如文件扫描)。
- 抢占式:高优先级进程一到,立即抢占当前运行的较低优先级进程的CPU。
- 非抢占式:高优先级进程需等待当前运行进程主动放弃CPU(如阻塞或完成)。
- 优先级反转与动态调整:为防止低优先级进程被永久“饿死”,系统通常会动态提升等待时间过长的进程优先级。
通常,高优先级的进程会被放入不同的队列优先处理。
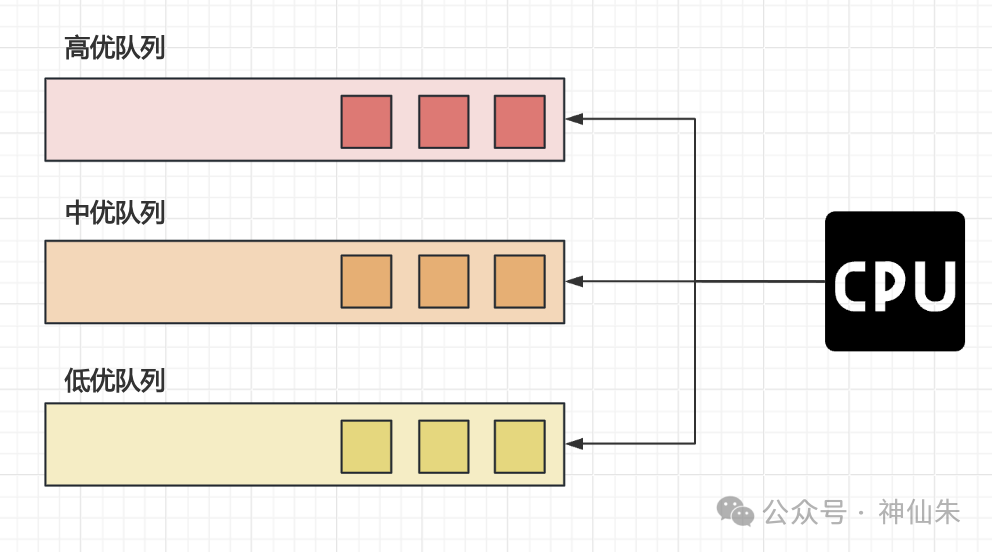
4. 多级反馈队列(MLFQ)—— 一个“缝合怪”
结合了RR和优先级调度的优点,是许多现代操作系统(如类Unix系统)采用的综合策略。
- 设置多个优先级队列,优先级从高到低排列。
- 每个队列的时间片长度不同:优先级越高,时间片越短(因为交互型任务需要快速响应);优先级越低,时间片越长(让计算密集型任务能连续运行更久)。
- 进程可在队列间移动:如果一个进程在时间片内未完成,它会被降级到更低优先级的队列;如果一个进程在低优先级队列中等待过久,可能会被临时提升优先级以防止饿死。
这种设计巧妙地平衡了响应时间和吞吐量。

一只思考调度算法的小孩
总结与实际应用
我们来回顾一下进程调度的核心脉络:
- CPU依据进程状态进行调度:只关心“就绪”还是“阻塞”。
- 状态转换的核心驱动是同步与互斥:这通过信号量和PV操作这一精妙的机制实现。
- 具体的挑选规则是调度算法:从简单的FCFS、公平的RR,到区分优先级的调度,再到综合性的MLFQ,算法决定了系统的响应性和公平性。
不同的场景适用不同的算法:
- 个人桌面系统:注重前台流畅体验,常采用类似MLFQ的算法。
- 服务器:强调公平性和吞吐量,可能采用RR或其变种。
- 嵌入式/实时系统:对响应时间有严格限制,通常采用抢占式优先级调度。

理解这些基础原理,不仅能帮你解答计算机基础面试题,更能让你明白电脑运行的底层逻辑。下次当你感觉电脑变卡时,或许就能想到,是哪个后台进程在队列里抢占了太多CPU时间呢?
希望这篇关于进程调度与切换的解析能对你有所帮助。如果你想与更多开发者交流此类底层技术话题,欢迎来云栈社区一起探讨。
 发表于 2026-2-22 06:13:42
|
查看: 215|
回复: 0
发表于 2026-2-22 06:13:42
|
查看: 215|
回复: 0
