在 Linux 内核源码中搜索 rb_node,你能找到上千处引用。CFS 进程调度、高精度定时器(hrtimer)、虚拟内存区域管理(VMA)、ext4 文件系统的 extent 管理——这些核心模块无一例外地选择了红黑树。
很多嵌入式工程师对红黑树的印象停留在“数据结构课上最难的那一章”,觉得它是面试题专用。但事实上,只要你的项目涉及有序数据的频繁插入、删除和查找,红黑树几乎都是最优解。在 云栈社区 的算法与数据结构板块,关于高效数据结构的讨论一直是热点。
这篇文章从原理入手,讲清楚红黑树为什么快、怎么保持平衡,然后结合嵌入式的真实场景,说说它到底怎么用。
先搞明白:为什么普通二叉搜索树不够用
二叉搜索树(BST)的规则很简单——左子节点比父节点小,右子节点比父节点大。查找、插入、删除的平均时间复杂度都是 O(log n),看起来挺完美。
但“平均”这两个字藏着坑。
如果插入的数据本身就是有序的——比如按时间递增插入定时器到期时间——BST 就会退化成一条链表,所有操作的时间复杂度退化到 O(n)。

在嵌入式系统中,这种退化是致命的。定时器管理、任务调度这些模块对时间敏感,一旦数据结构的性能不稳定,系统的实时性就没法保证。
所以我们需要一种 自平衡 的二叉搜索树,在任何插入顺序下都能保持树的高度在 O(log n) 范围内。红黑树就是解决这个问题最工程化的方案。
红黑树的五条铁律
红黑树本质上还是一棵二叉搜索树,只不过每个节点多了一个“颜色”属性(红或黑),并通过以下五条性质来约束树的形状:

性质 4 和性质 5 是核心。它们共同保证了一件事:树中最长路径不超过最短路径的 2 倍。
为什么?最短路径是全黑节点,最长路径是红黑交替。由于黑高一致,最长路径上的黑节点数等于最短路径,而红节点最多和黑节点一样多(因为不能连续红),所以最长路径 ≤ 2 × 最短路径。
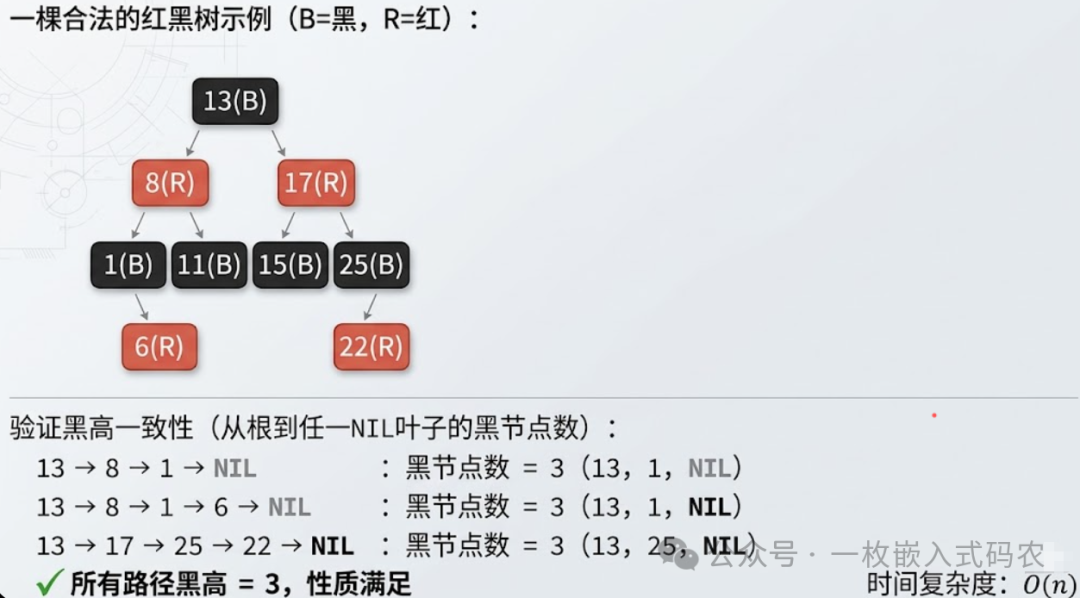
这种约束带来的好处是:对于 n 个节点的红黑树,高度最多为 2log₂(n+1)。查找、插入、删除的最坏时间复杂度都是 O(log n),性能有保底。
插入时如何保持平衡:变色与旋转
新插入的节点默认是 红色。为什么不是黑色?因为插入黑色节点必然破坏性质 5(黑高一致),而插入红色节点只 可能 破坏性质 4(连续红节点)。修复一个性质比修复另一个简单得多。
插入后,如果父节点是黑色,万事大吉,不需要任何调整。问题出在父节点也是红色的时候——违反了“不能连续红”的规则。这时需要通过 变色 和 旋转 来修复。
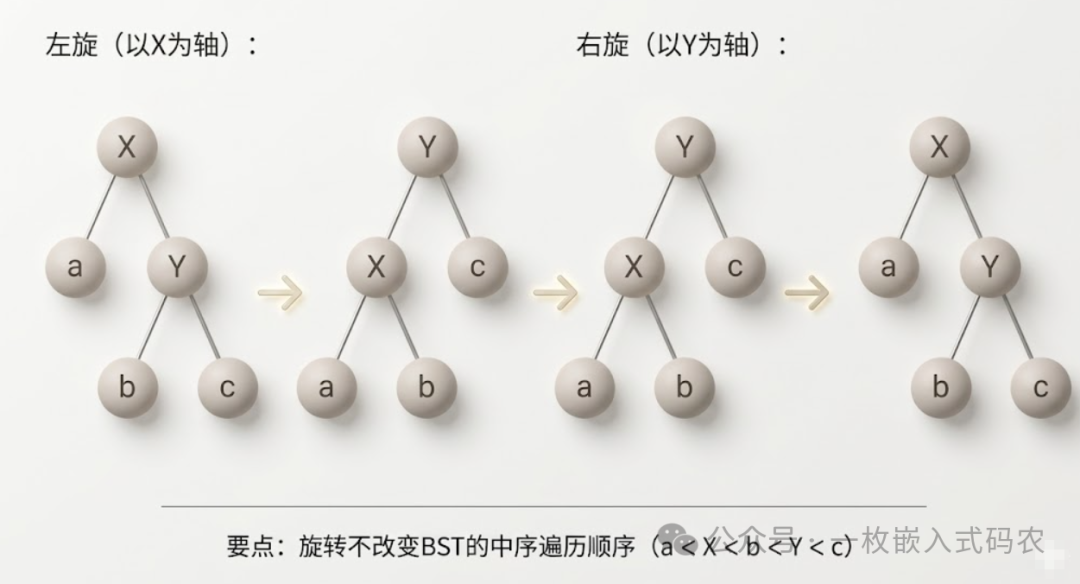
旋转操作图解
旋转是红黑树维持平衡的核心手段,分为左旋和右旋:
插入修复的三种情况
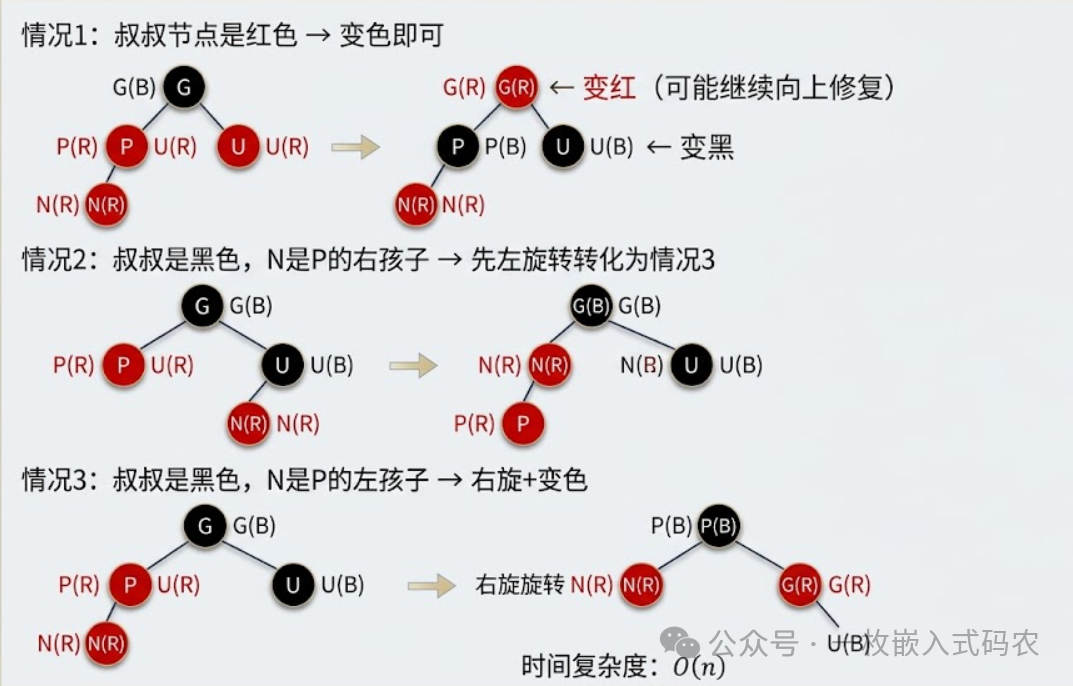
关键点在于:每次修复最多涉及 2 次旋转和 O(log n) 次变色,整体插入操作的时间复杂度仍然是 O(log n)。
红黑树 vs AVL树:为什么内核选了红黑树
既然都是自平衡 BST,为什么 Linux 内核选红黑树而不是 AVL 树?
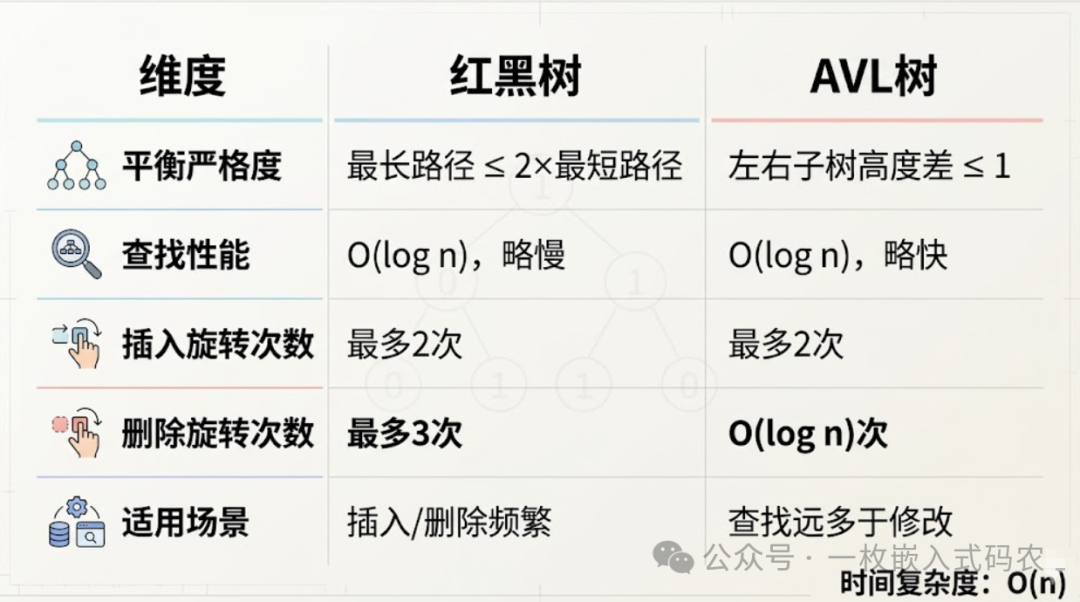
差距出在 删除操作 上。AVL 树删除后可能需要从删除点一路旋转到根节点,而红黑树最多 3 次旋转就能搞定。
在嵌入式系统中,定时器到期要删除、任务结束要移除、内存区域要释放——删除操作非常频繁。红黑树在删除时的稳定表现,使它更适合这类场景。
一句话总结:读多写少用 AVL,读写均衡用红黑树。嵌入式内核场景大多属于后者。
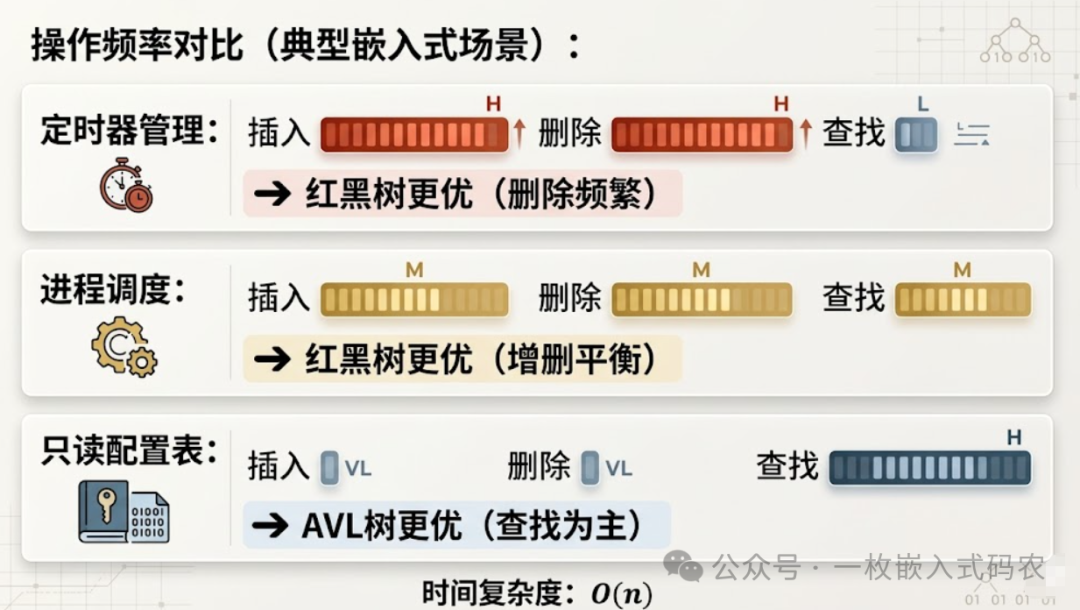
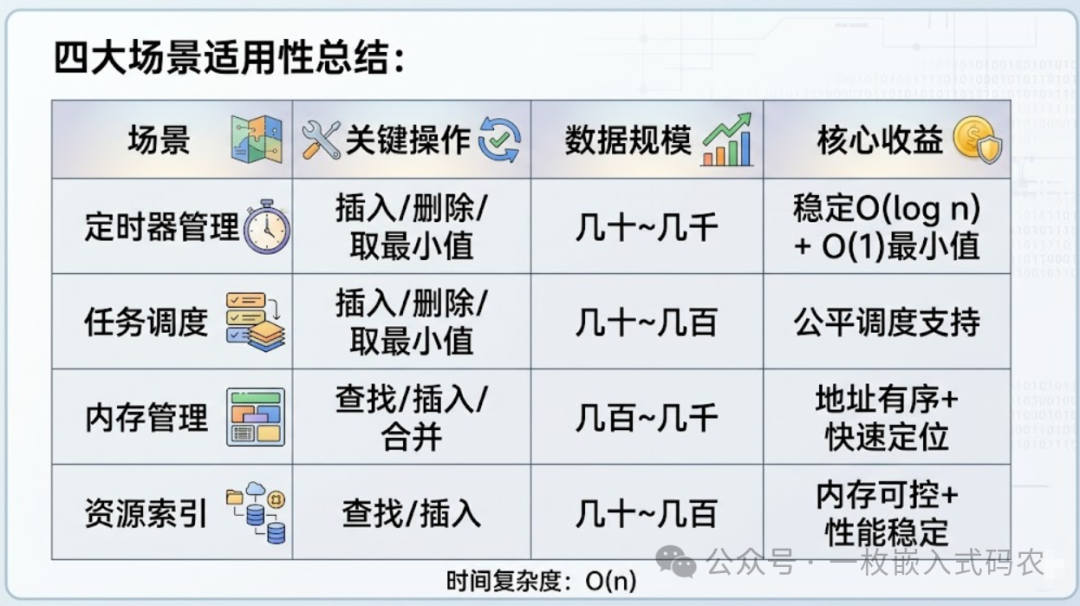
嵌入式中红黑树的四大应用场景
场景一:定时器管理
这是红黑树最经典的嵌入式应用。Linux 内核的高精度定时器(hrtimer)就用红黑树来组织所有待触发的定时器。
思路很直接:以到期时间作为 key,每个定时器作为一个节点插入红黑树。需要触发时,取最左节点(到期时间最小)就行,O(log n) 插入,O(1) 取最小值。
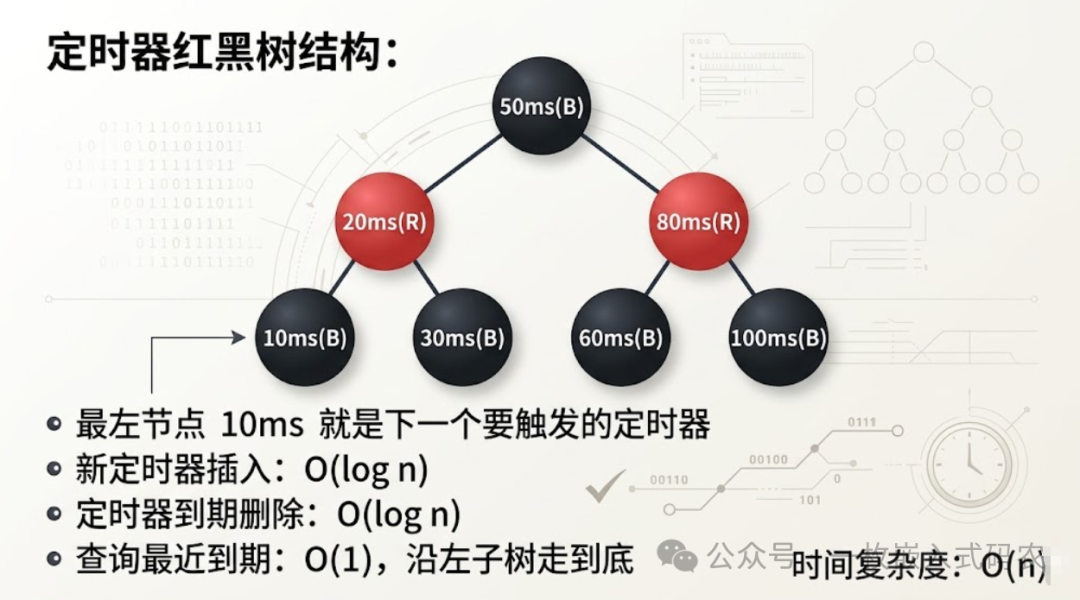
对比用有序链表管理定时器,插入是 O(n)。当系统中同时存在几百个定时器时,红黑树的优势就非常明显了。
场景二:进程/任务调度
Linux 的 CFS(完全公平调度器)用红黑树管理所有可运行的进程。每个进程的虚拟运行时间(vruntime)作为 key,vruntime 最小的进程(最左节点)获得 CPU 时间。
在 RTOS 中也可以借鉴这个思路。如果你的调度策略不是简单的固定优先级,而是需要动态权重或公平调度,红黑树是比优先级队列更灵活的选择。
场景三:内存管理
嵌入式系统中,如果需要管理大量不定长的内存块,红黑树可以用来维护空闲块列表。以内存块的起始地址或大小作为 key,分配和释放时快速找到最合适的块。
Linux 内核用红黑树管理进程的虚拟内存区域(VMA),每个 vm_area_struct 按地址范围组织在红黑树中。当发生缺页中断时,能在 O(log n) 时间内定位到对应的 VMA。
场景四:设备资源索引
当系统中有大量设备或资源需要按 ID 快速检索时,红黑树比哈希表更可控。哈希表在最坏情况下会退化到 O(n),而且需要预估容量、处理扩容,在内存受限的嵌入式环境中不太友好。红黑树的内存开销可预测(每个节点固定 3 个指针 + 1 个颜色位),性能有保底。
实战:用红黑树实现一个定时器管理器
光讲原理不写代码等于白说。下面用 Linux 内核风格的红黑树接口,实现一个嵌入式定时器管理器。
节点定义
Linux 内核的红黑树采用 侵入式设计 —— 把 rb_node 嵌入到你自己的数据结构中,而不是把数据塞进红黑树的通用节点里。这样做的好处是零额外内存分配,对嵌入式很友好。
#include "rbtree.h" /* Linux内核风格的红黑树头文件 */
/* 定时器节点 */
struct timer_node {
struct rb_node rb; /* 红黑树节点,嵌入到结构体中 */
uint32_t expire_ms; /* 到期时间(ms) */
void (*callback)(void *arg); /* 回调函数 */
void *arg; /* 回调参数 */
};
/* 定时器管理器 */
struct timer_manager {
struct rb_root root; /* 红黑树根节点 */
uint32_t count; /* 定时器数量 */
};
/* 初始化 */
void timer_manager_init(struct timer_manager *mgr)
{
mgr->root = RB_ROOT; /* 宏展开为 { NULL } */
mgr->count = 0;
}
插入操作
插入的核心逻辑就两步:先按 BST 规则找到插入位置,再调用 rb_insert_color 完成红黑树的平衡修复。
int timer_add(struct timer_manager *mgr, struct timer_node *timer)
{
struct rb_node **link = &mgr->root.rb_node;
struct rb_node *parent = NULL;
uint32_t expire = timer->expire_ms;
/* 第一步:BST查找插入位置 */
while (*link) {
struct timer_node *entry;
parent = *link;
entry = rb_entry(parent, struct timer_node, rb);
if (expire < entry->expire_ms)
link = &parent->rb_left;
else
link = &parent->rb_right;
}
/* 第二步:插入节点并修复红黑树性质 */
rb_link_node(&timer->rb, parent, link);
rb_insert_color(&timer->rb, &mgr->root);
mgr->count++;
return 0;
}
取最近到期的定时器
沿左子树一路走到底,就是到期时间最小的节点:
struct timer_node *timer_nearest(struct timer_manager *mgr)
{
struct rb_node *node = mgr->root.rb_node;
if (!node)
return NULL;
while (node->rb_left)
node = node->rb_left;
return rb_entry(node, struct timer_node, rb);
}
删除操作
定时器到期后,从红黑树中删除:
void timer_remove(struct timer_manager *mgr, struct timer_node *timer)
{
rb_erase(&timer->rb, &mgr->root);
mgr->count--;
}
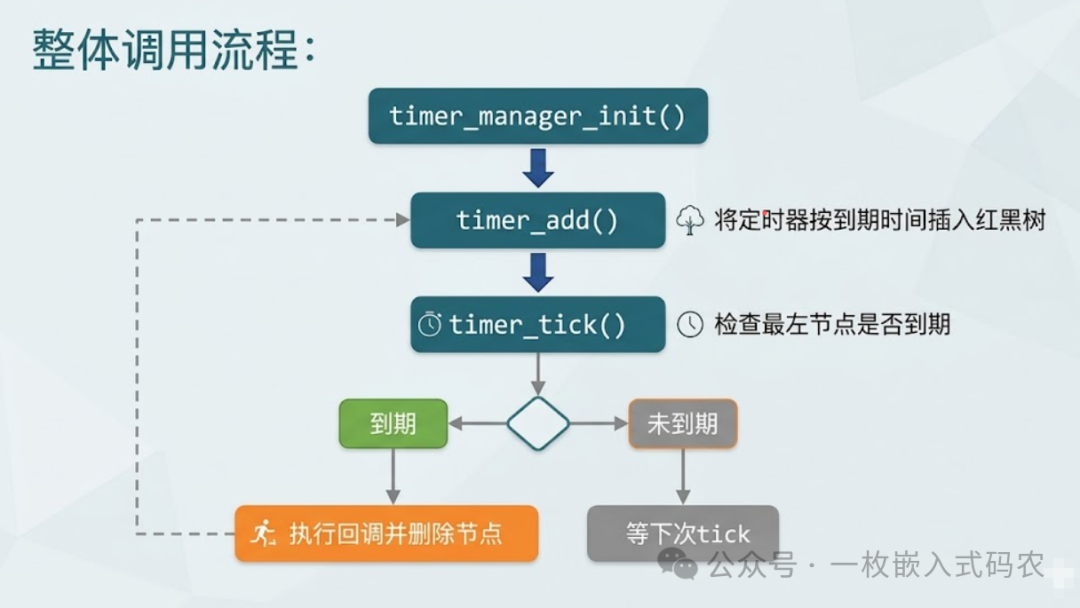
定时器tick处理
在系统 tick 中断或主循环中调用:
void timer_tick(struct timer_manager *mgr, uint32_t now_ms)
{
struct timer_node *timer;
while ((timer = timer_nearest(mgr)) != NULL) {
if (timer->expire_ms > now_ms)
break; /* 最近的都没到期,后面的更不用看了 */
timer_remove(mgr, timer);
timer->callback(timer->arg); /* 执行回调 */
}
}
这个实现不到 100 行代码,但已经具备了生产级定时器管理器的核心能力。红黑树的插入和删除帮你把性能锁定在 O(log n),不管定时器数量怎么增长,tick 处理的延迟都可控。
什么时候该用红黑树,什么时候不该
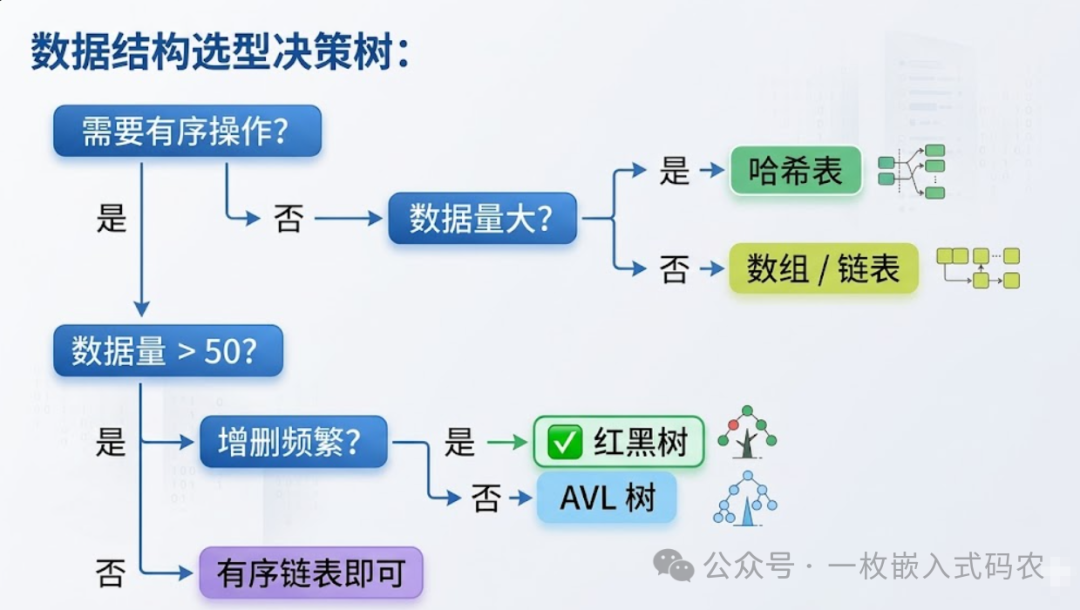
红黑树不是万能的。在决定是否引入之前,先问自己三个问题:
1. 数据量有多大?
如果节点数长期不超过二三十个,有序链表的 O(n) 插入在绝对时间上也就几微秒,没必要上红黑树。红黑树的优势在数据量上百之后才真正体现。
2. 需要有序遍历吗?
如果只需要按 key 查找,哈希表的 O(1) 平均查找比红黑树的 O(log n) 更快。但如果你需要“找最小值”“范围查询”“按序遍历”这类有序操作,哈希表做不到,红黑树才是正确选择。
3. 能承受多少内存开销?
每个红黑树节点需要 3 个指针(左、右、父)加 1 个颜色位。在 32 位系统上大约 13 字节,64 位系统上约 25 字节。如果你的 MCU 只有几 KB RAM,要慎重评估。
写在最后
红黑树看起来复杂,但拆开来看,核心就是那五条性质加上旋转变色两个操作。理解了“为什么这么设计”,实际使用反而很简单——Linux 内核已经把旋转和变色的逻辑封装好了,你只需要写 BST 的查找逻辑和定义自己的数据结构。
回过头来看这篇文章涉及的内容:侵入式数据结构、回调函数封装、管理器模式——这些其实都是 设计模式 在嵌入式 C 中的具体体现。红黑树的侵入式节点设计体现了“组合优于继承”的思想,定时器管理器的封装体现了“单一职责”原则,回调机制则是观察者模式的雏形。
如果你觉得这些概念似曾相识但又说不清楚,建议系统地学习一下设计模式。不是 Java 那套 23 种经典模式的全文背诵,而是搞清楚这些模式在嵌入式 C 中怎么落地、怎么用。掌握了 设计模式,你看内核代码、写模块架构时会顺畅很多,很多以前觉得“这代码怎么写得这么绕”的地方,突然就能看懂它为什么这么设计了。
 发表于 2026-4-3 03:15:13
|
查看: 116|
回复: 0
发表于 2026-4-3 03:15:13
|
查看: 116|
回复: 0
