去年8月因为自制火箭火遍全网的00后南航大学生,最近又有新动作——他做出来自制火箭第二代了!
B站up主@Lshang001 在10月9日发布了最新视频,标题为《【硬核】小型反推垂直回收火箭研发制造与发射》。

而他的第一代自制火箭同样硬核:

@Lshang001 在视频简介里说,这期素材中秋就拍得差不多了,只是白天上课、晚上剪片,进度一直很慢。直到前段时间看到稚晖君新发的机械臂视频,直接被“燃”到,连夜爆肝把片子剪了出来。视频末尾还放出了详细的致谢名单,从总体设计、主发动机、飞控软件,到发射架设计、视频剪辑,以及现场协助和零件加工单位都一一列出。
这是他发射的第一枚小型反推垂直回收火箭。从原型图到各个系统的仿真、算法,全部由这位00后利用业余时间完成。下面我们就来看看,他是如何一人包揽这枚火箭的研发、制造、发射与回收的。
业余时间网上自学,火箭自制一气呵成
先看看这枚火箭的全貌:

它的完整结构如下,左侧为带可折叠栅格舵和摆动喷管的侧视图,右侧为纵向剖面,标注了整流罩、反推发动机、传感器系统、矢量控制舵机和喷流致偏器:

内部三维建模的零部件爆炸图,展示了弹头、电子模块、舱体以及推进系统的详细布局:
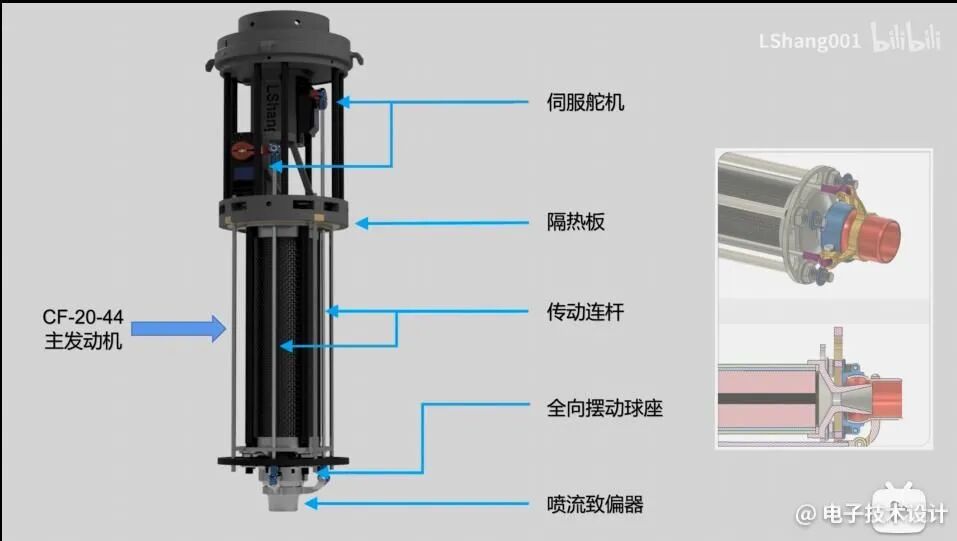
火箭的主发动机采用一块命名 CF‑20‑44 的碳纤维发动机,最大推力偏角15°,能够全向摆动,不进行控制时无推力损失:

@Lshang001 使用 C型截面装药,并对发动机的内部弹道以及推力曲线进行了详尽仿真。C型截面装药的特点是推力稳定、加工方便、燃烧余药少;右侧还对比了圆环、星形、十字、星芒等多种内孔装药的推力‑时间曲线,说明设计时经过了充分的计算选型。
发动机内弹道仿真结果:室压1.82 MPa,峰值2.04 MPa;药柱质量0.245 kg,长度170.0 mm,通喉比2.03,峰值质量流量486.348 kg/(m²·s)。

接下来是主发动机试车实验——黑暗环境中,发动机喷射出明亮的橙红色火焰:

试车数据也很漂亮:总冲量419 Ns(31% I),平均推力131 N,最大推力163 N,燃烧时间3.2 s,发射质量749 g,燃尽质量522 g;右侧的推力‑时间曲线清晰地显示出平稳的燃烧平台和快速的推力衰减。
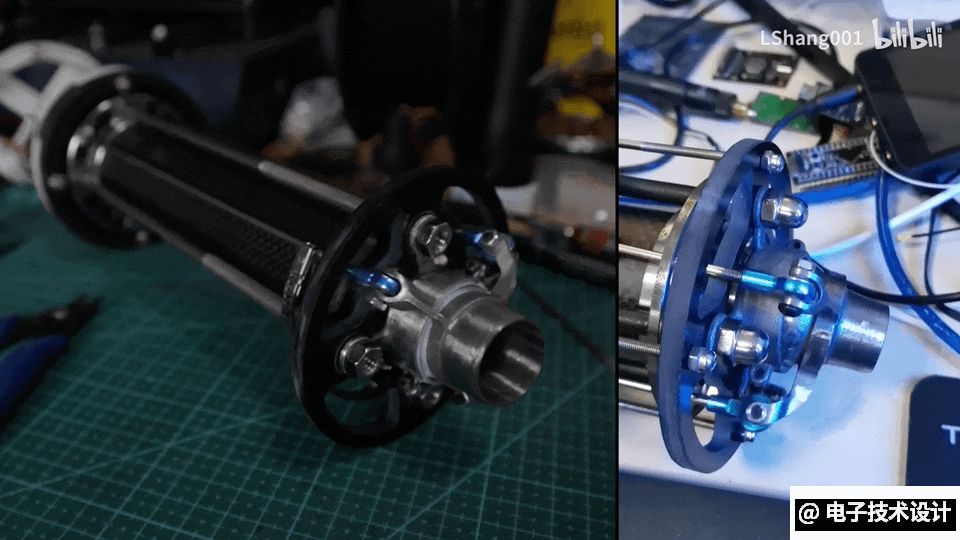
推力矢量控制系统的核心结构:伺服舵机、隔热板、传动连杆、全向摆动球座以及喷流致偏器,实物照片展现了碳纤维外壳和密密麻麻的线缆。
推力矢量控制试车过程则直接来了一段动图,废墟环境中看到火焰从喷管高速喷出,威力感十足。
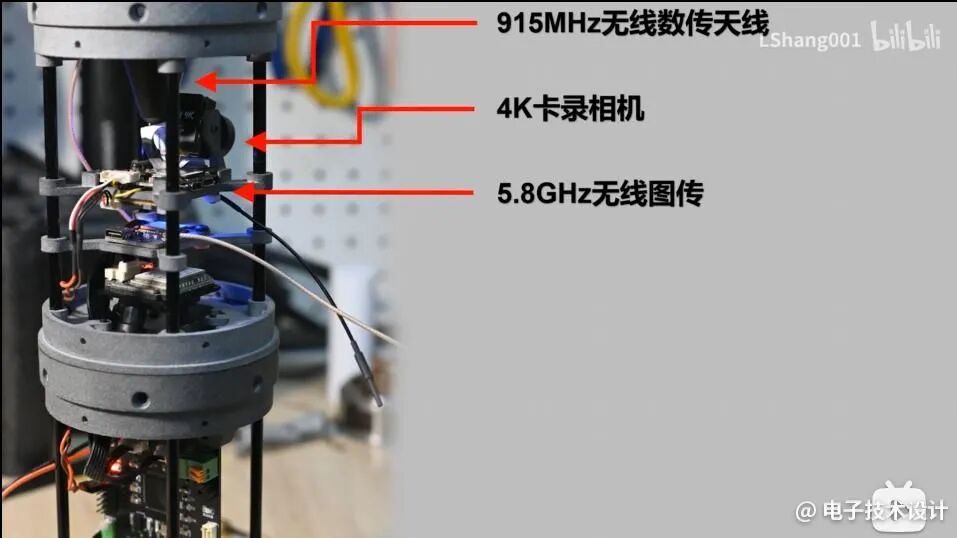
航电与飞控系统方面,从上到下依次是 915 MHz 无线数传天线、4K 卡录相机和 5.8 GHz 无线图传,搭建了一套实时回传与记录链。
更详细的飞控内部结构:5.8 GHz 图传、GNSS 卫星定位接收机、IMU惯性测量传感器、减震底座以及主控芯片 STM32F407VET6,背面还安装了 915 MHz 无线数传发射机。

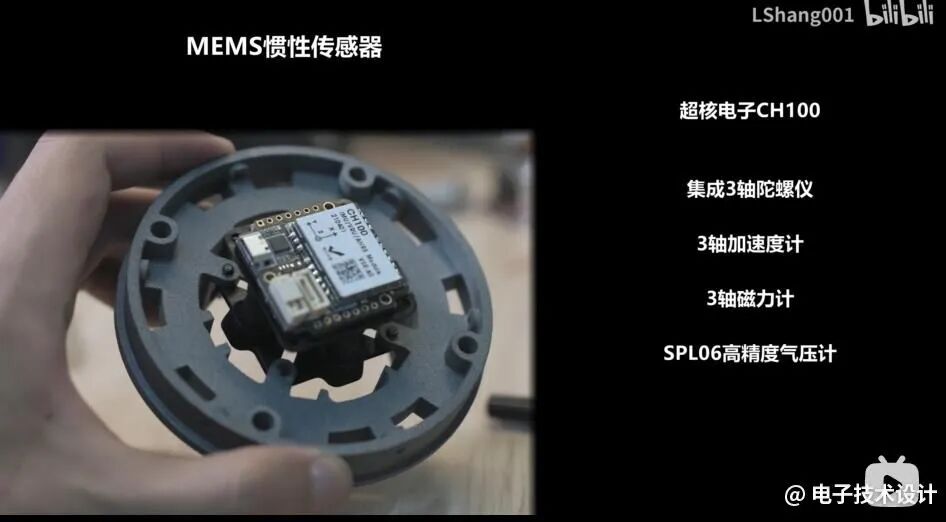
惯性测量选用了超核电子 CH100 MEMS 传感器,集成3轴陀螺仪、3轴加速度计、3轴磁力计和 SPL06 高精度气压计,保证姿态感知精度。
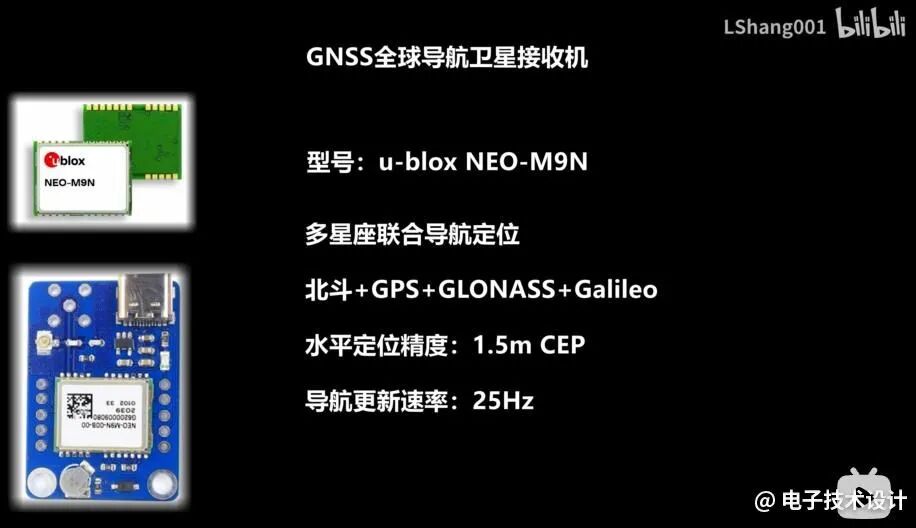
GNSS 全球导航卫星接收机则采用 u‑blox NEO‑M9N 模块,支持北斗 + GPS + GLONASS + Galileo 多星座联合定位,水平定位精度 1.5 m CEP,导航更新速率高达 25 Hz。
天线部分,安装于火箭整流罩内的 GNSS 四星多频螺旋天线,参数罗列非常专业:L1/L2/G1/G2/E1/E5a/B1/B2 频率顶点增益 ≥2.0 dBi,极化方式 RHCP,阻抗 50 Ω,LNA 增益 35±2 dB,噪声系数 ≤1.5,防水 IP67,重量仅 20 g,工作温度 -40℃ ~ +85℃。

飞控调试动图里,透过透明外壳可以看到内部指示灯闪烁,背景上 ANO TC 上位机界面中四轴无人机模型实时跟随姿态变化。
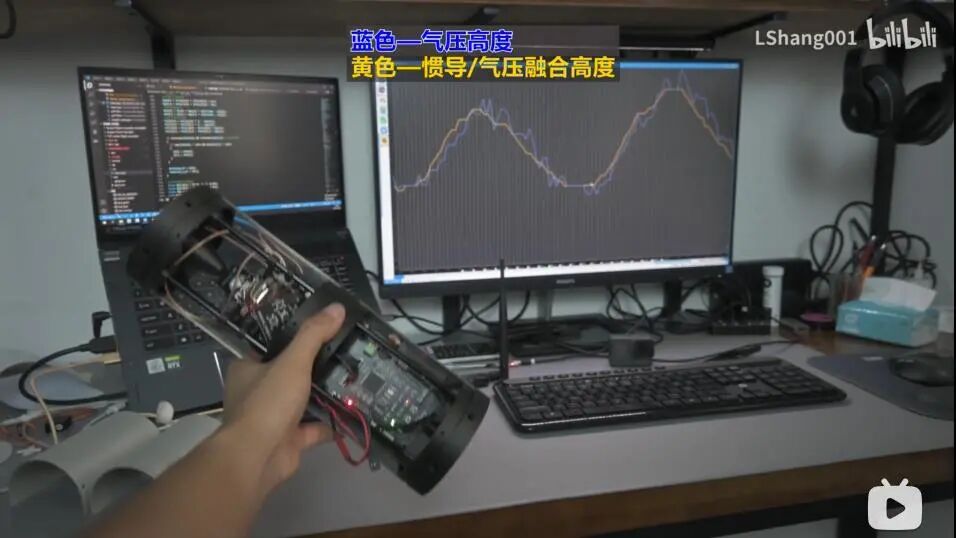
相对垂直高度结算测试中,蓝色曲线代表气压高度,黄色曲线代表惯导/气压融合高度,两者在低空区域吻合得还不错。
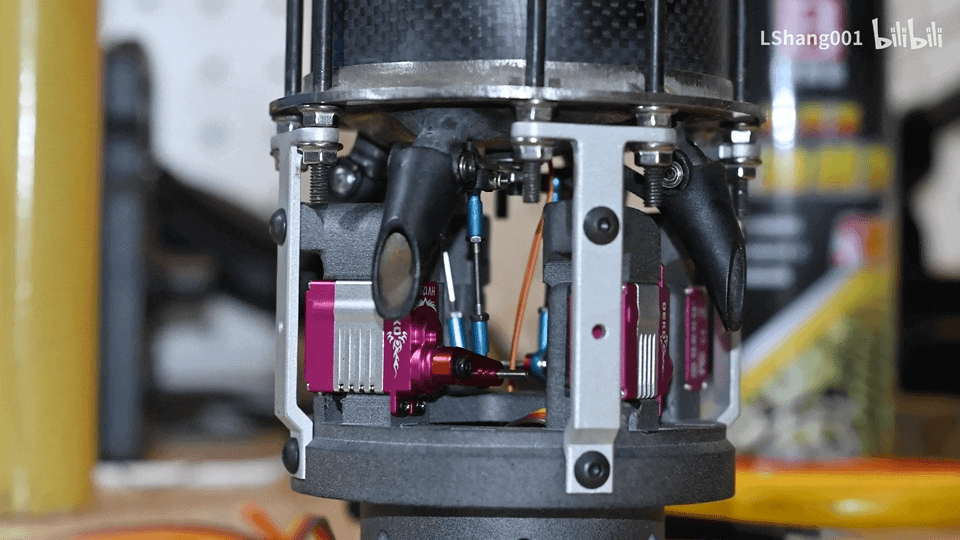
火箭着陆反推减速发动机通过独立控制四个喷管的摆角,实现对合推力矢量大小及方向的精确调节。
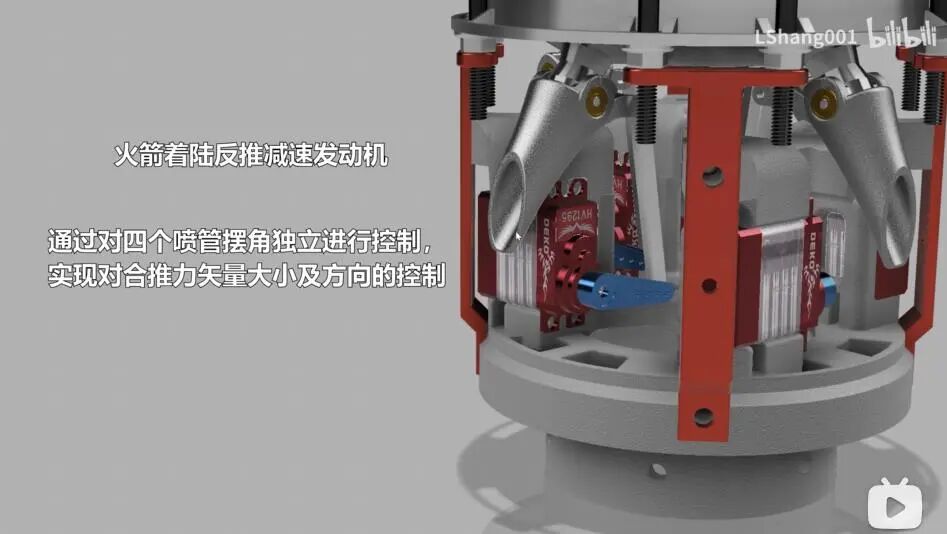
推力矢量控制的实物演示,可见腔体内紫红色舵机、黑色连杆,以及连接拉杆和叶片,动作精确。
控制逻辑说明:推力矢量控制不仅用于着陆减速的推力大小调节,还同时承担火箭俯仰/偏航的力矩控制。

反推发动机裸机试车:夜间户外,多个小喷口向上喷射出放射状雾化气流,验证了反推逻辑基本走通。

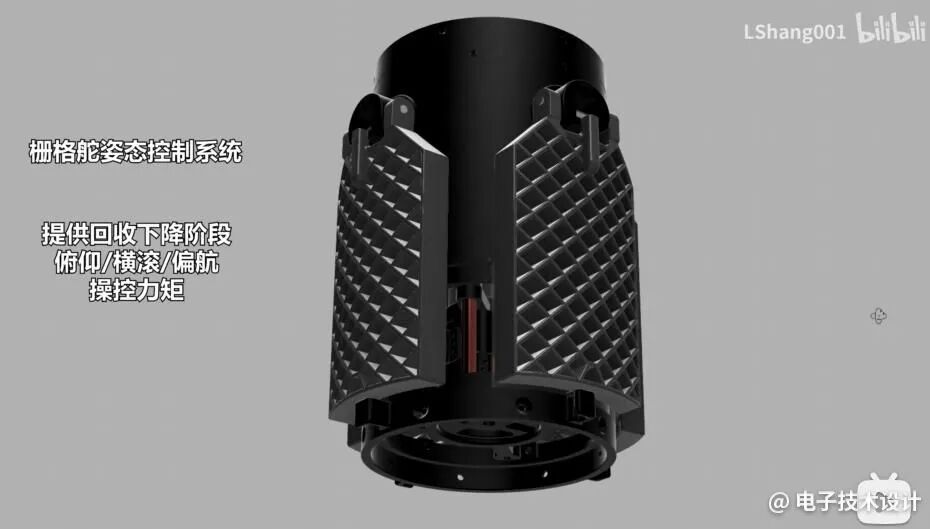
栅格舵姿态控制系统 则为回收下降阶段提供俯仰/横滚/偏航的操控力矩,外形与 SpaceX 猎鹰9号的栅格舵十分神似。
着陆缓冲支腿采用折叠设计,末端有防滑垫,能在触地瞬间吸收冲击。

支腿展开测试动图里,可以清楚看到机构从收拢到展开的全过程,动作流畅。
所有部件组装完毕后的整体状态,放在工作台上,旁边还散落着各种工具。

成功发射,但回收系统出现异常
点火瞬间,火箭拖着灰黑色尾迹拔地而起,现场的冲击力很强。
然而,由于控制算法还不够成熟,反推回收系统工作异常,最终启动了紧急备用降落伞。万幸的是箭体落回草地后只受轻伤。

@Lshang001 表示,火箭已经完成修复翻新工作,不出意外很快就会有第三次试飞。

从模型到回收火箭,一步一个脚印
UP主 @Lshang001 本名刘上,就读于南京航空航天大学航天学院航空航天工程专业,是一位不折不扣的00后。疫情期间他在家上网课之余做出了第一枚火箭,所有步骤全部自主完成。
早在2019年10月,刘上就在B站发布了第一个相关视频《小型矢量喷管姿态自稳固体火箭》,当时他在动态里写道:这枚火箭最初只是简单的模型,但随着慢慢完成,他想试试能不能用一台小固体发动机把它送上天。不论结果如何,只要一直坚持下去,说不定哪天就成功了。

半年时间,他自学了机械设计、3D 建模、发动机、燃料、编程、飞控算法和 3D 打印等一系列相关技能,并通过一系列视频记录了自己磕磕绊绊的成长过程。
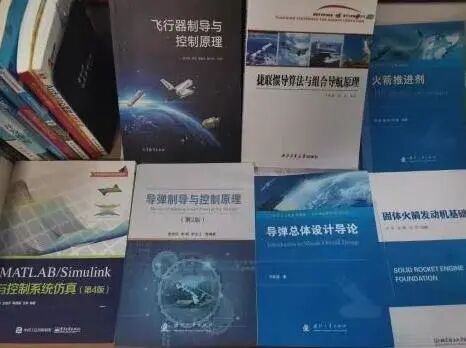
房间墙壁上贴着埃隆·马斯克的海报,书架上摆满了《飞行器制导与控制原理》《导弹制导与控制原理》《固体火箭发动机基础》《MATLAB/Simulink在控制系统仿真中的应用》等专业书籍,整个房间就是一个小型航天发烧友实验室。

刘上的部分书单里,一眼扫过去几乎全是导弹、火箭推进剂、制导控制这些硬核大类。
2014年还在初中的他就写道:“我觉得最吸引我的东西是航模、火箭、化学。”他分享了一句话与大家共勉:“努力学习,掌握专业技能,做国防建设的人才。”
这期新视频发布后,连刚做完机械臂的稚晖君也跑来评论“很厉害,加油”,中国航天科技集团五院总体设计部的官方账号更是留下三个“妙”字,以及“哔哩哔哩跟踪正常”的俏皮回复。

刘上给自己规划了三步走:姿态控制 → 飞行轨迹控制 → 定点软着陆。虽然第二次发射的回收系统出了些波折,但也才刚刚开了个头。像这样一个人在宿舍、工作间爆肝搞火箭的故事,在云栈社区的开发者广场里也常常能见到。说不定下一次,他又能带给我们更多惊喜。
 发表于 2026-5-9 23:55:32
|
查看: 154|
回复: 0
发表于 2026-5-9 23:55:32
|
查看: 154|
回复: 0
