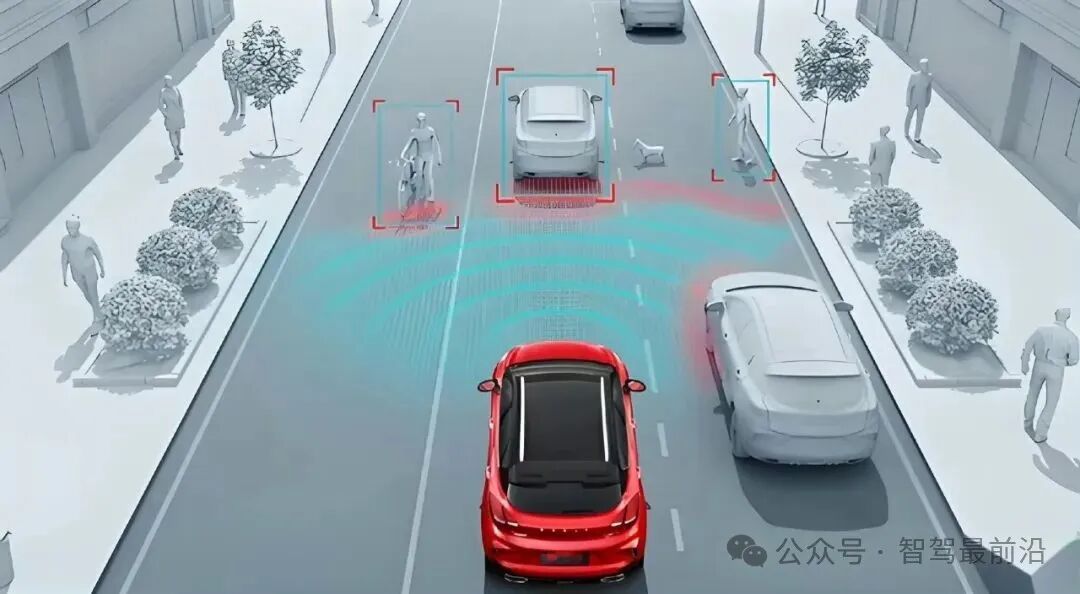
场景理解在自动驾驶中,指的是车辆感知环境后,能否真正“理解”正在发生什么。它的核心价值不在于识别了多少物体,而在于如何将感知到的原始信息,转化为可供决策与控制模块使用的、可靠且富含语义的“世界模型”。

图片源自:网络

场景理解的定义与重要性
场景理解旨在整合路面所有可观测信息,构建对当前交通情境的连贯认知。这不仅要识别出行人、车辆、车道线、标志等独立对象,更要解析对象间的相互关系、预测其未来动向,并筛选出对决策至关重要的信息。例如,前方有靠边行驶的自行车,系统需判断其意图是停车、转弯还是可能逆行;在复杂路口,则需综合信号灯状态、各方行驶意图,评估安全可行的轨迹。
实现高质量的场景理解,要求上层决策所依赖的是经过抽象和不确定性评估的信息。感知层负责输出“事实”(如物体位置),但若这些事实未被组织成稳定、连贯并带有置信度的语义世界模型,规划模块就可能基于错误或矛盾的信息做出危险决策。因此,一个优秀的场景理解系统,是连接原始感知与可靠行动的关键桥梁。

世界的描述方式:表示学习与多层次语义
场景理解的首要问题是“如何描述世界”。传感器原始数据(图像、点云等)过于底层,需被抽象为适合自动驾驶的表示形式,这涉及多个维度:
- 空间几何信息:包括物体的三维位置、速度、朝向和边界框,是碰撞检测、车道保持等规划任务的基础。点云和深度估计算法是构建几何表示的主要来源。
- 语义信息:将对象类别(车、人)细化为带有行为模式的语义(“正在并线的货车”、“推婴儿车的行人”),直接影响系统处理策略。
- 对象关系与意图:表征对象间的相对位置、遮挡关系、危险等级等。例如,路边车辆开门与邻近行人的关系至关重要。意图则是对对象未来行为的概率化预测。
- 时间维度:交通场景是动态的。利用历史轨迹估计惯性行为模式,能提升预测准确性。常用时序图、轨迹簇等表示来捕获时间演变。
- 多模态融合与不确定性:融合不同传感器的信息并表征其可靠性差异。理想的表示应同时包含精确几何、高层语义及概率化的不确定性描述,并能实时更新。
图片源自:网络
从数据到推理:学习、预测与逻辑的结合
在定义了合适的表示后,需要构建能够生成该表示的系统,并融合学习到的模式与逻辑规则。
图片源自:网络
- 数据驱动与泛化能力:标注数据可训练检测、预测模型,但真实场景复杂多变。需融合真实道路数据、仿真数据及合成数据,特别是针对边缘场景。自监督与无监督表示学习有助于降低对标注的依赖,提升模型泛化能力。
- 模型架构选择:端到端大模型可学习像素到控制的映射,但可解释性差。模块化架构(感知、跟踪、预测、规划分离)利于工程化和验证。混合方案常被采用:用深度学习完成感知与短期预测(相关技术可参考 人工智能),再用规则或模型推理处理安全约束与长期规划。
- 不确定性建模:必须提供置信度和替代解释。常用方法包括贝叶斯网络、概率图模型、蒙特卡洛采样或神经网络输出多模态分布,以便规划层根据不确定性调整安全策略。
- 因果推理与规则约束:在学习模型之外,嵌入物理规律和交通规则(如湿滑路面制动距离延长),可在统计模型失效时提供安全底线。
- 在线学习与闭环更新:系统需能回收新场景下的失败样本,通过标注重训练或在线适应快速调整模型,这依赖于完善的数据闭环工程体系。

工程实践:实时性、鲁棒性与可验证性
理论上的完美模型需经受严苛的工程约束考验。
- 实时性约束:系统需在极短时间内(几百毫秒)完成全链路处理。工程上常做折中:采用稀疏表示、候选采样、轻-重模型级联等策略。专用硬件加速器(如车规级SoC)对提升吞吐量至关重要,这也是云原生与硬件协同设计的范畴(相关讨论可见 云原生/IaaS)。
- 鲁棒性保障:应对传感器故障、恶劣天气等挑战。策略包括传感器冗余备份、降级策略以及基于不确定性的故障检测。例如,视觉失效时可依赖雷达点云提供几何信息。
- 可验证性与可解释性:安全监管要求系统行为可证明、可追溯。模块化设计有利于形式化验证和仿真测试。需建立故障诊断机制,快速定位错误源于感知、表示还是模型。
- 仿真验证与数据闭环:高保真仿真可构造罕见边缘场景和危险工况,用于验证和生成训练数据,加速能力迭代。需关注验证覆盖率,并优先覆盖高风险场景。
图片源自:网络
总结
场景理解是自动驾驶安全落地的核心能力,它是一套系统工程,融合了合适的世界表示、基于多源数据的学习与推理,并严格满足实时、鲁棒、可验证的工程要求。它既依赖大数据驱动下的深度学习进展(探索更多 大数据 技术),也需要物理模型与规则约束,并通过持续的数据闭环不断进化。
对工程团队而言,这是一项需长期迭代的工作。每一次表示的优化、每一类边缘数据的补充、每一项验证覆盖的提升,都将直接转化为车辆在真实道路上更可靠、更安全的表现。从“看见”到“理解”,最终到“可靠行动”,是自动驾驶技术迈向成熟的关键路径。 |  发表于 2025-12-13 05:39:17
|
查看: 223|
回复: 0
发表于 2025-12-13 05:39:17
|
查看: 223|
回复: 0
