
无需里程计、无需轨迹规划,仅凭一台单目相机和一个端到端神经网络,把「所见」直接变成「所动」——让无人机像猛禽穿林一样,看一眼便侧身钻过比自己还窄、且朝向未知的缝隙。
苍鹰俯冲穿过树干间的缝隙时,从不会在脑子里「计算」那道缝隙有多宽、自己该以什么姿态通过、又已经飞了多远。它只是凝视着缝隙,便侧身掠过。
这种高风险、高精度的「感觉-运动」(sensorimotor)飞行直觉,长期以来是工程系统遥不可及的能力。
现在,浙江大学的最新成果,让自主无人机第一次拥有了类似的「精准飞行直觉」。相关论文 Precise Aggressive Aerial Maneuvers with Sensorimotor Policies 发表于国际权威期刊《Science Robotics》。
如何让一架欠驱动的四旋翼无人机穿过一道狭窄缝隙,是学界已探索十余年的难题,其难度远超想象。
研究团队设置的考验近乎苛刻:一道仅 20×60 厘米的矩形缝隙,最窄处只给机身留 5 厘米余量——而无人机本身就有 10 厘米高。
这意味着它必须像特技飞行员一样,在飞行途中瞬间将机身倾斜、甚至几乎完全侧立(横滚角接近 90°),才能「擦着边」钻过去。
更苛刻的是,它身上只有一台单目相机和一个飞控模块,事先并不知道缝隙在哪里、朝向哪个角度——既不去估计自己飞了多远,也不预先规划一条航线。
本文将从「方法」与「结果」两个维度,拆解这项工作是如何让无人机学会鸟一样的极限穿越的。
什么是「感觉-运动策略」?给无人机一套「飞行本能」

想象一支接力赛队伍。
传统的自主无人机就像这样一支队伍:相机负责「感知」,里程计 / 状态估计模块负责「定位」(估计自己在哪、飞了多远),轨迹规划模块负责「规划」一条航线,最后由控制器「跟踪执行」——一棒接一棒地传递信息。
这套「状态估计—轨迹规划—轨迹跟踪」的模块化流水线在宽松场景下工作良好,却有两个致命弱点:每一次「交棒」都会丢失信息、累积误差。
而当无人机要以接近 90° 的姿态、擦着 5 厘米的边高速钻过窄缝时,任何一环的微小偏差都可能被瞬间放大成坠机。
鸟类却不这样飞。它们没有「里程计」,不会刻意估计自己飞了多远,也不会预先「规划轨迹」——大脑凭借肌肉记忆,把视觉与前庭感觉直接变成肌肉动作,这就是所谓的「感觉-运动」(sensorimotor)回路。
研究团队的核心思路,正是抛弃这套繁复的中间环节,给无人机装上同样的「本能」:
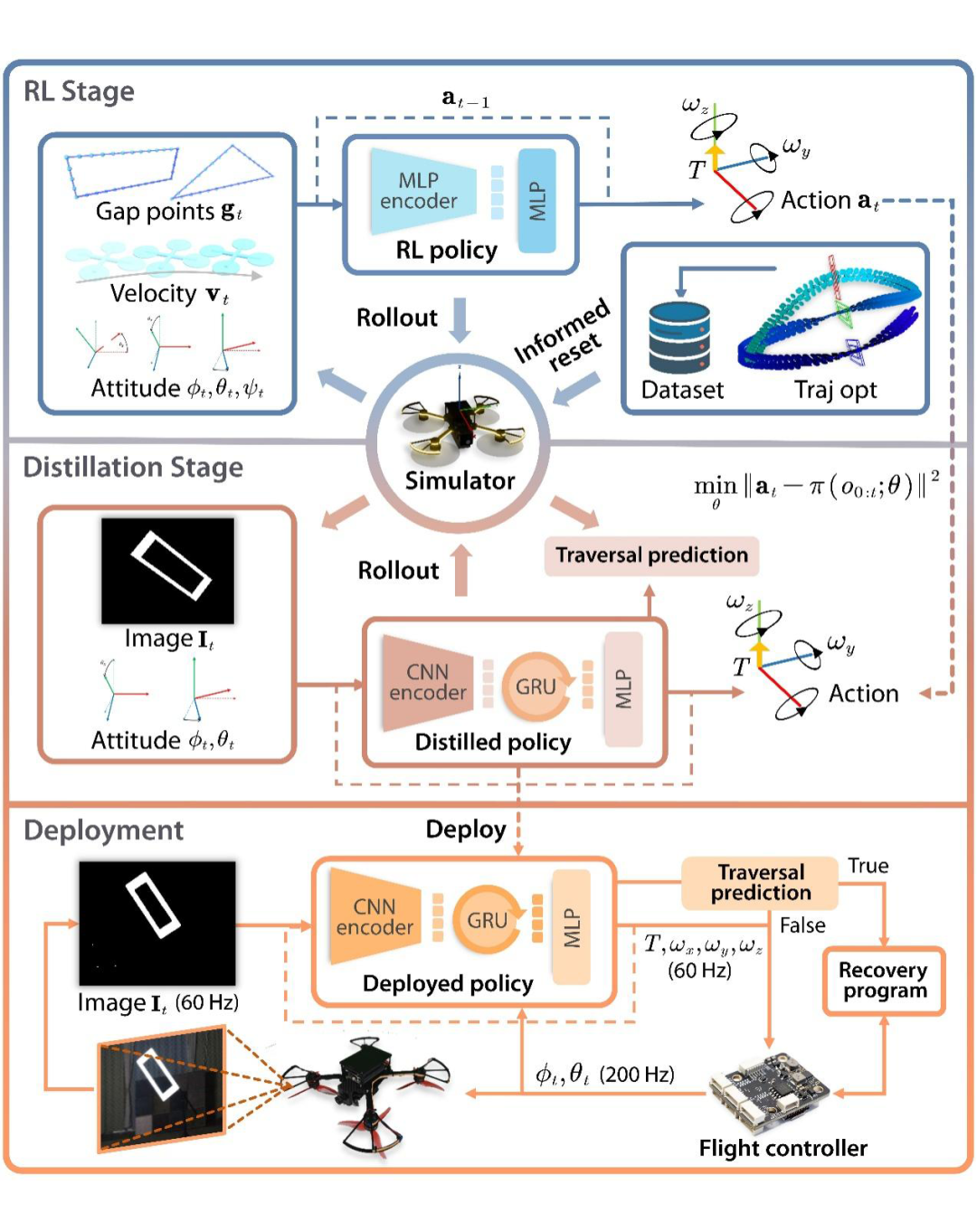
训练一个端到端的神经网络策略,直接把机载单目相机看到的画面 + 无人机自身的惯性感知,映射为底层飞行指令(总推力 + 机体角速度)。
中间没有里程计、没有显式状态估计,也没有任何预先规划的参考轨迹。
就像鸟一样——「看一眼,直接动」。


方法:如何「教会」无人机这套本能?

让神经网络直接「看图开飞机」听上去美好,训练起来却极其困难:高维的图像观测 + 极其狭窄的可行解空间,让强化学习几乎无从探索。团队用三个关键设计破解了这一难题。
核心一:两阶段「解耦」——先学会飞,再学会看
直接从像素学到控制太难。团队把问题拆成两步:
第一步,先在一个低维的「上帝视角」(oracle MDP,可直接访问精确状态)中,用强化学习训练出一个会穿缝的「专家」;
第二步,通过策略蒸馏(policy distillation)+ 在线模仿学习,让一个只能看到历史图像的「学生」网络去模仿专家的决策,建立起「历史像素 → 动作」的映射。
这样既降低了学习难度,又最终得到一个仅靠机载视觉、不依赖里程计与轨迹规划就能工作的策略。
核心二:「知情重置」——破解狭窄解空间的探索难题
即便在低维的上帝视角里,穿过窄缝的可行解依然像「针眼」一样狭窄:让智能体从零开始随机探索,几乎不可能撞对那条能穿过去的轨迹。
团队提出了名为「知情重置」(Informed Reset,IR)的巧妙策略:先用基于模型的轨迹优化在仿真中生成一批开环可行轨迹,再让强化学习智能体从这些轨迹上的状态出发去探索。
这就像教人穿针引线:与其让他凭空乱试,不如先把他的手引到针眼附近——成功的样本一旦出现,学习便事半功倍。
效果立竿见影:在单个矩形窄缝任务上,不用 IR 时成功率最高只能到约 70%,且需要约三倍的训练样本;启用 IR 后,在同样的样本预算下成功率提升到约 96%,整个强化学习阶段仅需约 1.5 小时。
在更难的连续三窄缝任务中,不用 IR 的智能体甚至完全找不到可行解(会被「先冲过去」的即时奖励困在局部最优,学不会在缝前减速);IR 让它成功跳出了这个陷阱。
核心三:仿真到现实——靠「域随机化」练出鲁棒的本能
策略完全在仿真中训练,却要部署到充满气动扰动、电压波动与感知噪声的真实世界,「仿真-现实差距」是最大的拦路虎。
团队在训练中进行了大量域随机化(domain randomization),尽可能撑大策略的「可靠工作状态空间」,让它学会从高维感知中提取稳健的决策线索。
一个意外的收获是:正是域随机化,让策略在从未见过运动缝隙的情况下,也学会了实时跟踪、穿过移动中的缝隙(详见结果部分)。
结果:100+ 次真实飞行,验证四类极限能力

团队搭建了一台尺寸仅 38×10 厘米(桨尖间距)的定制无人机,搭载单目相机、PX4 飞控和 NVIDIA Jetson Orin NX 机载计算单元,全部计算都在机上完成。
在超过 100 次真实穿缝飞行中,系统展现出四类关键能力。
能力一:穿过倾斜近 90° 的矩形窄缝
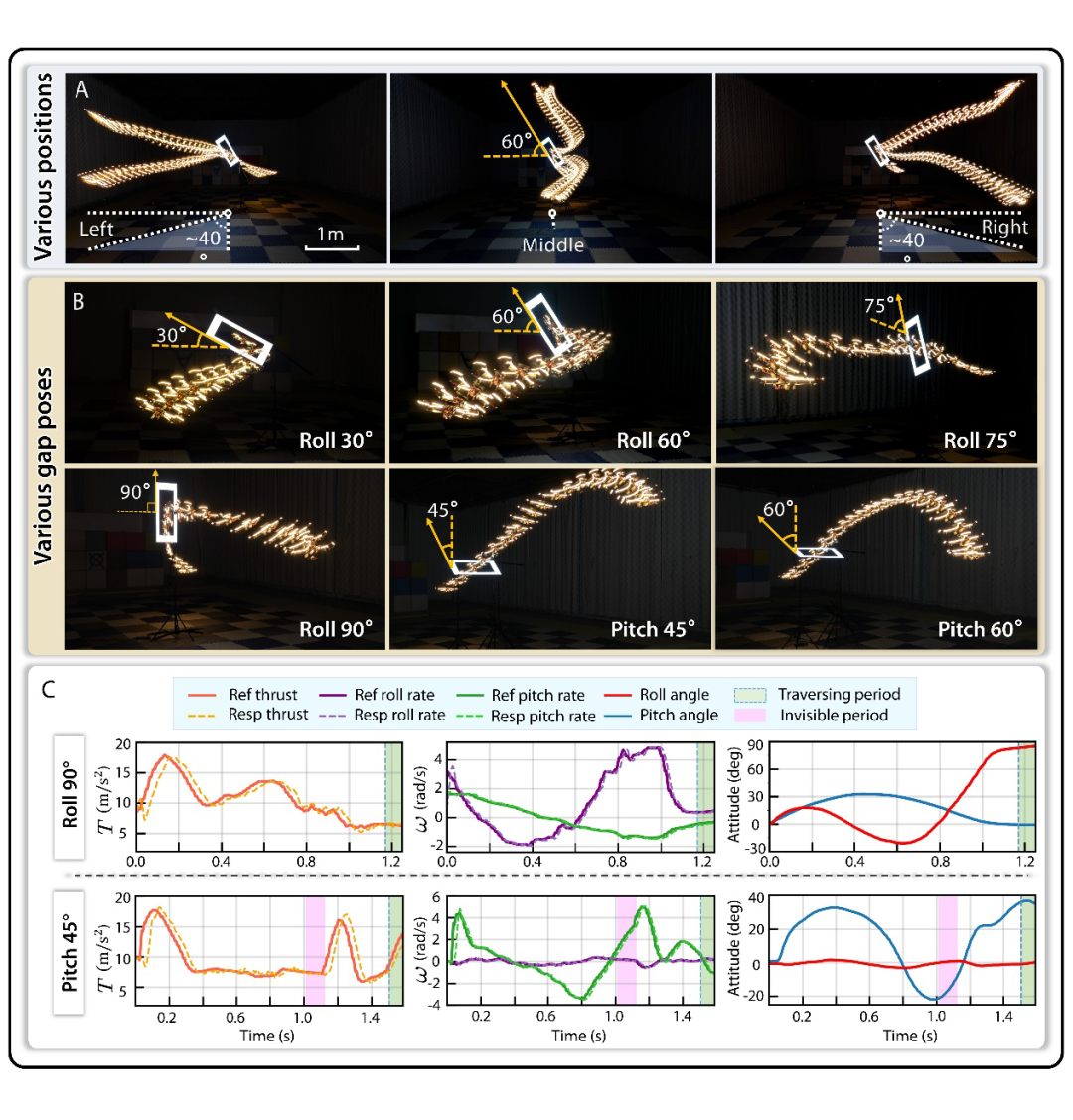
面对一道 20×60 厘米、最窄处只给机身留 5 厘米余量(机身高 10 厘米)、且朝向事先未知的矩形缝,无人机取得了前所未有的成功率:
- 横滚角 ≤60° 时,几乎百发百中——30 次中成功 29 次;
- 横滚角 >60° 时,成功率仍达 90%(30 次中 27 次);
- 当缝隙横滚到 90°,策略把机体 x 轴角速度直接拉满到 6 rad/s,让无人机几乎完全侧立着钻过去;
- 俯仰方向上,30° 时成功率 100%,45° 为 80%,60° 为 73.3%。
值得注意的是,团队从未显式规定「该以什么姿态穿越」,但无人机却自发地在过缝瞬间把机身长轴对齐到缝隙边缘——无需里程计,也无需任何姿态指令,完全靠自己「悟」出了正确姿态。这种能力,很大程度上归功于其采用的 深度学习 策略在大量仿真试错中形成的内部表征。
即便有时缝隙短暂滑出相机视野(论文中称为「不可见期」),无人机依然能凭借循环神经网络(RNN)维护的「信念状态」稳稳穿过。
能力二:穿过「会动」的缝隙——尽管从未训练过
研究者手持缝隙框,在无人机飞行途中突然旋转或平移它。尽管策略从未在「动态缝隙」上训练过,无人机却能实时反应:缝隙被旋转,它就调整姿态重新对齐;缝隙向上移动,它就跟着爬升,最终稳稳穿过。
仿真中针对水平单向、水平往复、向下运动等多种运动模式的测试也证实了这一点——图像中的缝隙中心始终被稳稳「锁」在画面中线附近。
消融实验进一步表明,这种「无师自通」的反应能力,正是域随机化带来的。
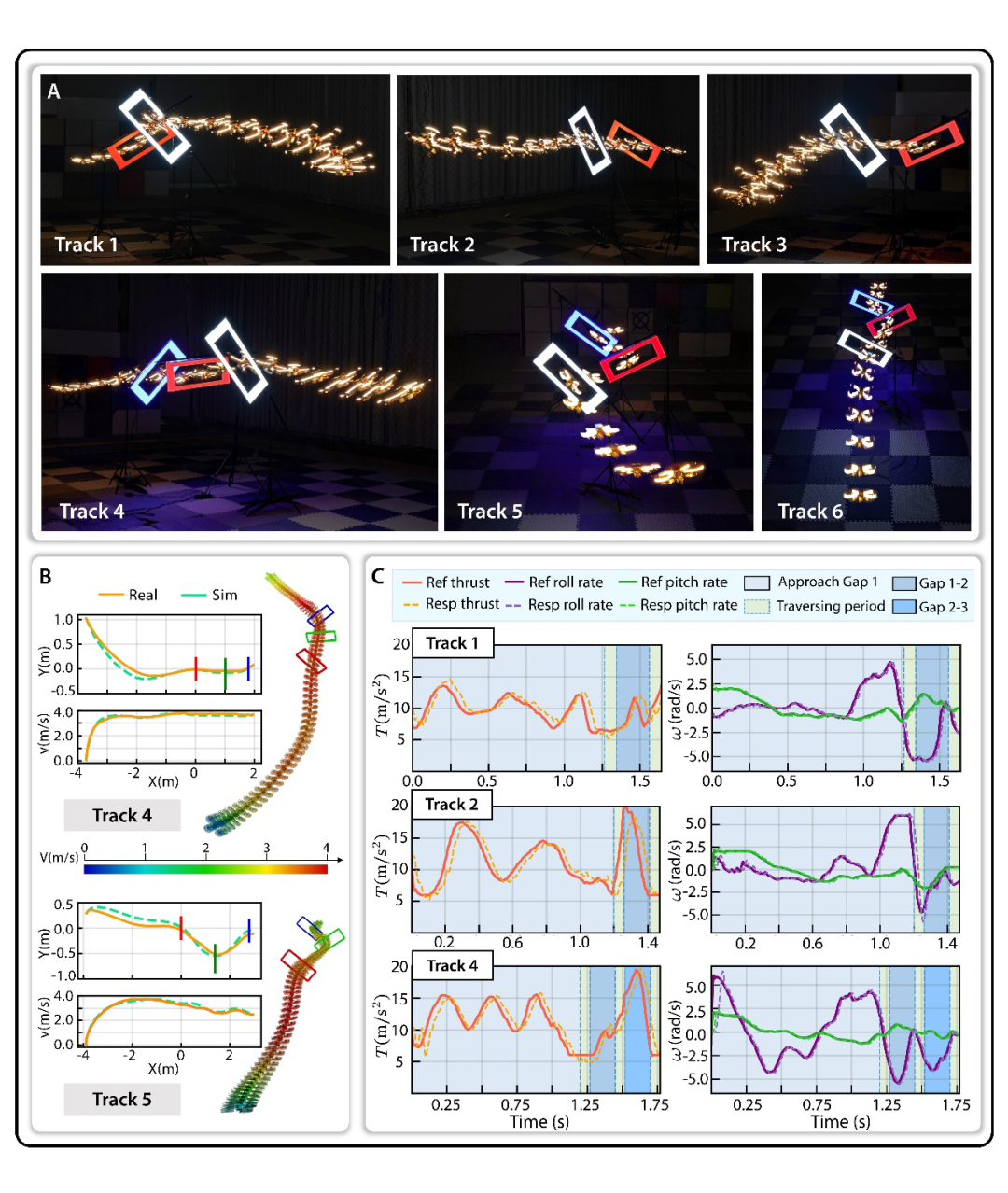
能力三:连续穿过紧密排布的多道窄缝
团队设计了包含 2~3 道窄缝、且彼此靠得很近的赛道(部分还做了横向错位)。这对探索和真机部署都是更严苛的考验——无人机不仅要快速切换姿态,还要做精细的横向机动。
结果显示,策略在多条赛道上都保持了很高的重复性。
能力四:应对各种奇异形状的开口
不依赖任何手工设定的穿越姿态或定义的视觉特征,团队还训练出能穿过三角形、平行四边形(真机)以及椭圆、菱形(仿真)等多种几何形状开口的策略。
面对三角形缝,无人机一致地把机体平面对齐到三角形最长边(角度偏差大多 <5°);而面对平行四边形缝,它则展现出多种可行的穿越姿态。
总结与展望

这项工作是飞行机器人「感觉-运动」智能的一个里程碑:它首次证明,无人机仅凭机载感知,无需里程计、无需轨迹规划,就能以端到端的方式,完成 SE(3) 严格约束下、对精度近乎零容错的极限空中机动。
它把生物式的「直接感知-行动」范式,成功带入了此前被认为必须依赖模块化流水线的高难度任务。
更重要的是,它指向了一个更自由的未来:当无人机能像鸟一样、凭「飞行本能」穿越建筑窗口、树木间隙乃至洞穴入口,飞行机器人可达的任务空间,将被拓展到前所未有的边界。
论文 Precise Aggressive Aerial Maneuvers with Sensorimotor Policies 由浙江大学控制科学与工程学院、浙江大学湖州研究院等单位完成,共同第一作者为巫天越、徐广通,通讯作者为高飞。
作者介绍
巫天越(Tianyue Wu),即将前往香港大学攻读博士学位,浙江大学本硕。研究兴趣为机器手以及人形机器人的灵巧操作智能,飞行机器人运动智能。在 Science Robotics,Robotics: Science and Systems 等机器人领域权威期刊与会议上以第一作者发表文章。


徐广通(Guangtong Xu),杭州电子科技大学自动化学院副研究员。2015 和 2021 年在北京理工大学分别获得学士和博士学位。2021-2023 年在清华大学精密仪器系从事博士后研究。2023-2026 年在浙江大学湖州研究院开展科研工作,此期间完成以上工作。主要研究领域为飞行机器人自主导航、运动规划、集群协同等。在 TASE、RA-L、ICRA、IROS 等机器人领域期刊/会议上发表论文数篇。
高飞(Fei Gao),浙江大学控制科学与工程学院长聘副教授、研究员、博士生导师。研究兴趣为机器人规划、建图、状态估计,集群机器人,机器人学习。微分智飞(Differential Robotics)创始人兼首席执行官,国家自然科学基金“优秀青年科学基金项目”(优青,2024–2026)获得者。在 Science Robotics, Transactions on Robotics 等权威期刊以第一作者或通讯作者发表论文。
 发表于 2026-6-18 00:36:50
|
查看: 127|
回复: 0
发表于 2026-6-18 00:36:50
|
查看: 127|
回复: 0
