在嵌入式开发中,无论是串口通信、网络协议栈还是工业总线,核心都离不开“接收命令、解析命令、执行业务逻辑”。上位机发来一个cmd_id,设备端根据这个ID去调用对应的处理函数。这个流程看起来简单,但随着产品迭代,命令数量从几十条膨胀到数百条,很多项目的命令处理代码会迅速演变成一个难以维护的“意大利面条”式的超大函数。
一、你是不是也写过这样的“万能”指令解析?
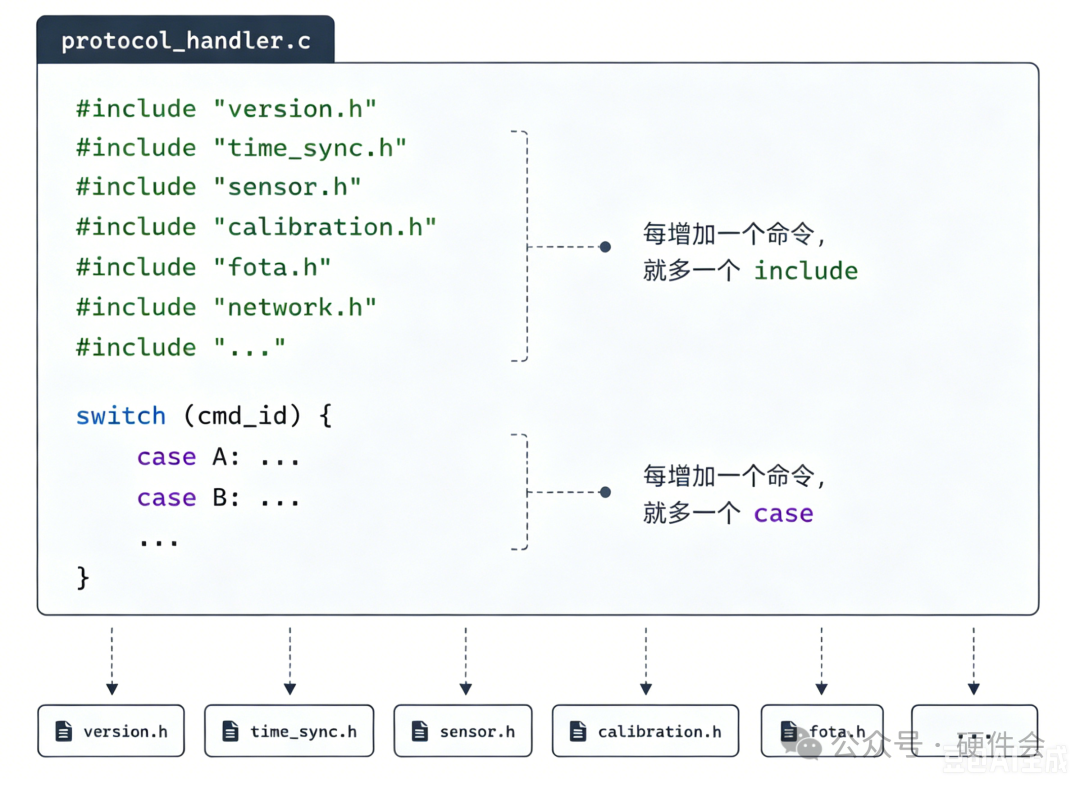
很多新手面对指令需求,第一反应就是大量使用 if-else / switch-case,试图在一个大函数里解决所有问题:
void protocol_parse(uint16_t cmd_id, uint8_t *buf, uint16_t len)
{
if(cmd_id == CMD_READ_VERSION)
{
read_version_handle(buf, len);
}
else if(cmd_id == CMD_SET_TIME)
{
set_time_handle(buf, len);
}
else if(cmd_id == CMD_SERVO_STOP)
{
servo_stop_handle(buf, len);
}
// 新增指令必须不断往下追加else if
………………………………
else
{
send_unknown_cmd_resp();
}
}
这种写法下的依赖结构,简直就是一场灾难:
这套写法的致命痛点显而易见:
- 耦合严重:所有业务逻辑堆在一个解析函数里,几百条指令后代码极度臃肿,单文件编译时间都跟着变长。
- 扩展性极差:新增命令必须修改解析函数本体,完全违反了开闭原则,在庞大分支中很容易改错原有逻辑。
- 维护地狱:命令ID、处理函数分散在代码各处,找不到清晰的映射关系,多人协作时极易引发冲突。
- 无法模块化:电机、传感器、舵机的命令全揉在一起,模块边界模糊,根本没法独立复用。
二、核心原理:什么是查表式命令分发?
行业内成熟的解决方案是查表式命令路由(Command Dispatcher)。它的核心思想非常朴素:把“命令ID — 处理函数”的映射关系存入一张表格,收到指令后直接查表匹配,自动路由执行对应的回调函数,从而彻底消灭超长的分支判断。
1. 底层基石:函数指针统一签名
所有命令处理函数必须遵循一套统一的入参和返回值规范,这样分发器才能统一调度。
// 命令处理函数类型定义
typedef int (*cmd_handler_fn)(const uint8_t *payload, uint16_t len);
- 返回
int:0 代表执行成功,负数则代表各类错误(如参数错误、未知指令等)。
*cmd_handler_fn:这是一个函数指针变量名。const uint8_t *payload:指向指令有效载荷,const修饰防止函数内部篡改原始报文。uint16_t len:载荷数据长度,防止内存越界解析。typedef:给这种函数格式起个别名叫 cmd_handler_fn。
2. 命令表项结构体(路由映射单元)
typedef struct {
uint16_t cmd_id; // 指令唯一编号
cmd_handler_fn handler; // 对应处理函数指针
const char *name; // 命令名称,日志调试用
} cmd_entry_t;
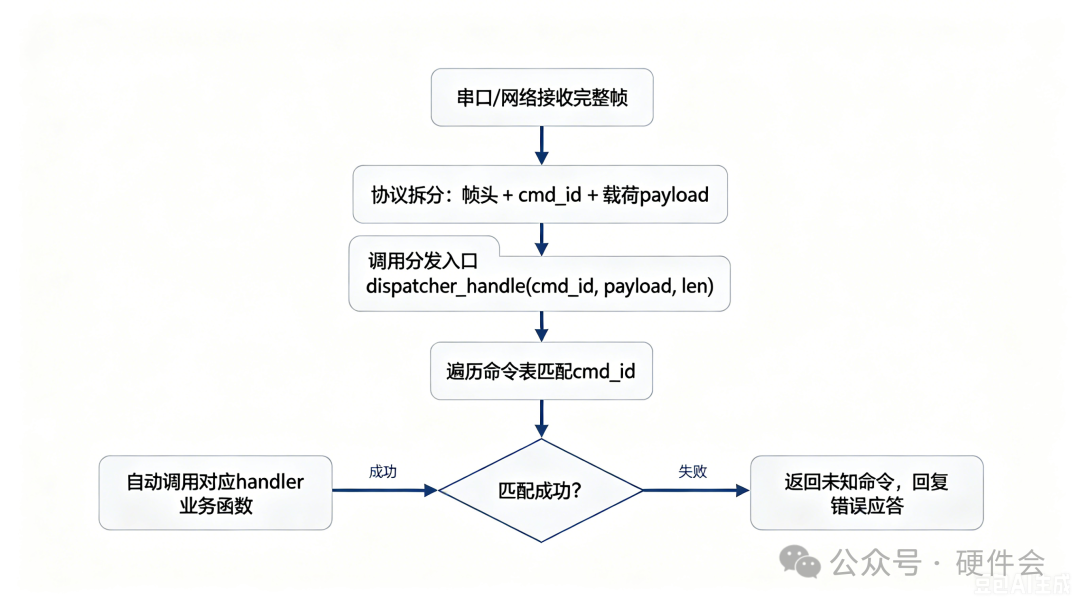
3. 整体数据流
数据经过串口或网络接收后,被拆分成帧头、cmd_id和负载,然后进入分发器。分发器遍历命令表,匹配成功则自动调用对应的业务函数,失败则返回错误应答。
4. 两种主流实现方案
- 静态命令表:在编译期直接写死整张路由表,简单轻量,适合小微型项目。
- 动态注册命令表:在上电初始化阶段,由各个模块逐个注册自己的命令。模块间解耦更强,是中大型项目的首选。
三、方案一:静态查表命令分发
整体可分为三个职责清晰的源文件:
cmd_dispatcher.h:头文件,定义类型和对外接口函数声明。cmd_dispatcher.c:分发器核心实现(查找与路由逻辑)。cmd_table.c:命令注册表、协议入口、业务函数绑定。
核心思想是:收到命令ID → 在命令表中匹配 → 自动调用对应处理函数,解耦“协议解析”和“业务逻辑”。新增命令只需往表里加一项,不用再改动分发逻辑。
1. 头文件 cmd_dispatcher.h
#ifndef CMD_DISPATCHER_H
#define CMD_DISPATCHER_H
#include <stdint.h>
// 统一命令处理函数原型
typedef int (*cmd_handler_fn)(const uint8_t *payload, uint16_t len);
// 命令表条目
typedef struct {
uint16_t cmd_id;
cmd_handler_fn handler;
const char *name;
} cmd_entry_t;
// 分发入口
int dispatcher_handle(uint16_t cmd_id, const uint8_t *payload, uint16_t len);
#endif
2. 实现文件 cmd_dispatcher.c
#include "cmd_dispatcher.h"
// 外部全局静态命令表
extern const cmd_entry_t cmd_table[];
extern uint16_t const CMD_TABLE_SIZE;
int dispatcher_handle(uint16_t cmd_id, const uint8_t *payload, uint16_t len)
{
for(uint16_t i = 0; i < CMD_TABLE_SIZE; i++)
{
if(cmd_table[i].cmd_id == cmd_id)
{
// 通过函数指针调用业务处理函数
return cmd_table[i].handler(payload, len);
}
}
// 未匹配到指令
return -1;
}
3. 命令注册表 cmd_table.c
#include "cmd_dispatcher.h"
// 命令ID宏定义
#define CMD_READ_VERSION 0x01
#define CMD_SET_TIME 0x02
#define CMD_SERVO_CTL 0x03
// 业务函数声明
extern int handle_read_version(const uint8_t *payload, uint16_t len);
extern int handle_set_time(const uint8_t *payload, uint16_t len);
extern int handle_servo_ctrl(const uint8_t *payload, uint16_t len);
// 静态路由表,编译期确定全部映射关系
const cmd_entry_t cmd_table[] = {
{CMD_READ_VERSION, handle_read_version, "ReadVersion"},
{CMD_SET_TIME, handle_set_time, "SetTime"},
{CMD_SERVO_CTL, handle_servo_ctrl, "ServoCtrl"},
};
// 自动计算表长度,增删命令无需手动改数字
#define CMD_TABLE_SIZE (sizeof(cmd_table)/sizeof(cmd_table[0]))
4. 外部调用
当从串口等物理层解析出命令字后,在主循环或定时器中调用dispatcher_handle即可。
while (1)
{
if(frame_parse.valid == 1)//解析的数据帧有效
{
uint16_t cmd = (frame_parse.cmd1 << 8) | frame_parse.cmd2;
dispatcher_handle(cmd, frame_parse.data, frame_parse.data_len);
frame_parse.valid = 0;//置零,便于下次使用
}
}
优点:代码量最小、上手简单、无运行时初始化逻辑;
缺点:所有命令集中在一张表,模块耦合;运行时无法切换指令集;每增加一项命令,就不得不修改cmd_table表。
对于代码量极小的简单项目,这样做也足够清晰:
//命令执行函数
static void handle_read_version(void);
static void handle_set_time(void);
// 命令表固定
static const cmd_entry_t cmd_table[] = {
{ CMD_READ_VERSION, handle_read_version, "ReadVersion" },
{ CMD_SET_TIME, handle_set_time, "SetTime" },
};
#define CMD_TABLE_SIZE (sizeof(cmd_table) / sizeof(cmd_table[0]))
// 直接遍历本地表,代码最简
int dispatcher_handle(uint16_t cmd_id, const uint8_t *payload, uint16_t len)
{
for (uint16_t i = 0; i < CMD_TABLE_SIZE; i++)
{
if (cmd_table[i].cmd_id == cmd_id)
{
return cmd_table[i].handler(payload, len);
}
}
return -1;
}
//在main 函数中或者 定时器中,来调用dispatcher_handle分发函数
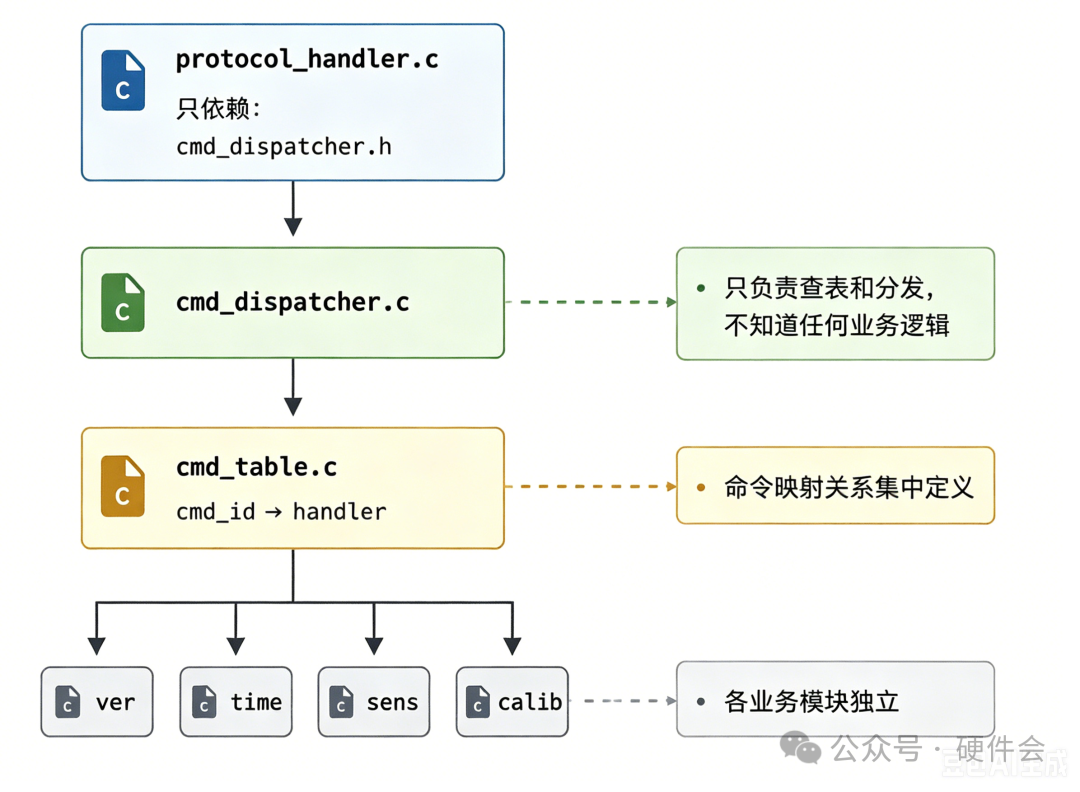
这个方案的模块依赖关系就清晰多了,protocol_handler.c只依赖cmd_dispatcher.h,各业务模块独立。
四、方案二:动态注册命令分发
这套方案能让分发内核与业务命令完全解耦。 cmd_dispatcher.c 可以作为一个通用中间件,从一个项目直接搬到另一个项目复用。
- 分发内核层(cmd_dispatcher):通用中间件,只负责查表路由、参数校验,不感知任何具体业务。
- 命令业务层(xxx_cmd.c):接收分发器回调,解析payload参数,翻译指令动作,调用底层驱动;仅依赖命令分发框架。
- 驱动层(xxx.c):只做纯粹的外设驱动控制,不包含任何
cmd_id、报文解析、命令注册,可独立复制移植到其他项目。
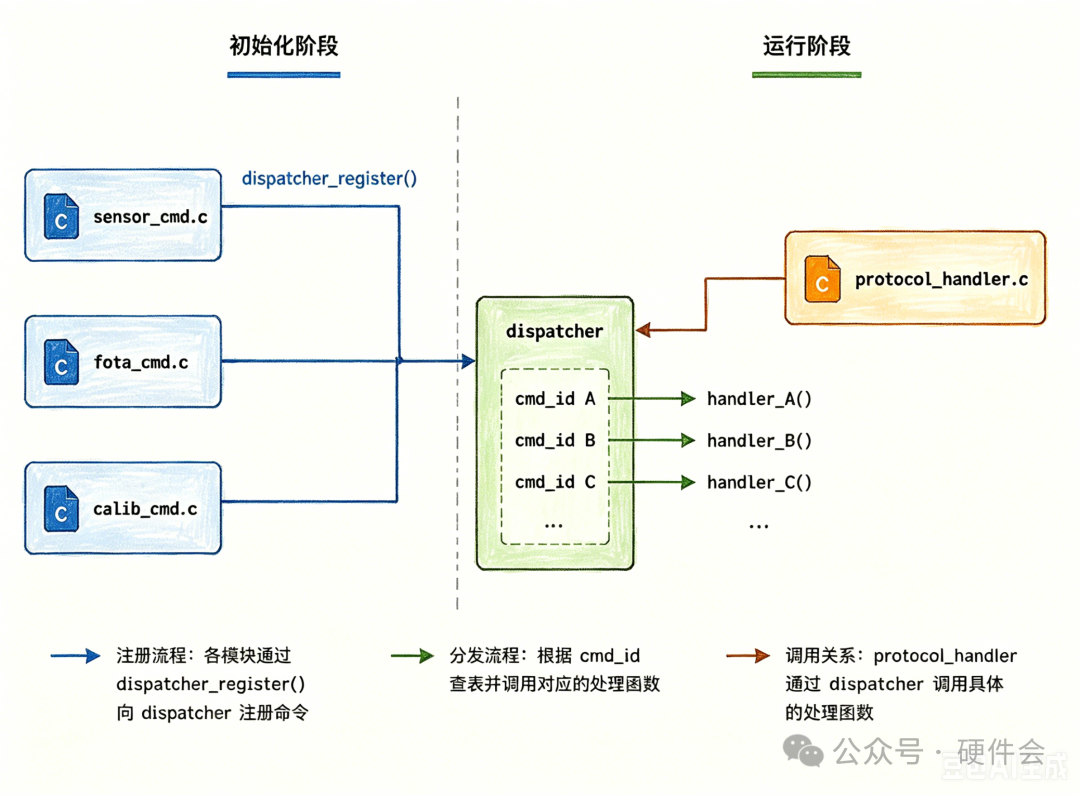
各个模块(舵机、传感器、电机)在自己的初始化函数中自主注册自身指令,模块化边界非常清晰。
1. 头文件 cmd_dispatcher.h
#ifndef CMD_DISPATCHER_H
#define CMD_DISPATCHER_H
#include <stdint.h>
#define CMD_MAX_COUNT 32 // 最大支持注册32条指令
typedef int (*cmd_handler_fn)(const uint8_t *payload, uint16_t len);
typedef struct {
uint16_t cmd_id;
cmd_handler_fn handler;
const char *name;
} cmd_entry_t;//命令表项
// 初始化绑定命令表(适配多表切换场景)
int dispatcher_init(const cmd_entry_t *table, uint16_t count);
// 动态注册单条命令
int dispatcher_register(uint16_t cmd_id, cmd_handler_fn handler, const char *name);
// 命令分发入口
int dispatcher_handle(uint16_t cmd_id, const uint8_t *payload, uint16_t len);
#endif
2. 内核实现 cmd_dispatcher.c
#include "cmd_dispatcher.h"
#include <assert.h>
// 全局命令池 + 计数游标
static cmd_entry_t s_cmd_table[CMD_MAX_COUNT];
static uint16_t s_cmd_count = 0;
// 初始化分发器,传入命令表首地址 + 表项总数
/*
1.入参校验:命令表为空 / 数量为 0 → 返回 -1(初始化失败)
2.把外部传入的命令表、数量保存到静态全局变量
3.返回 0 表示初始化成功
*/
int dispatcher_init(const cmd_entry_t *table, uint16_t count)
{
if(table == NULL || count == 0)
return -1;
// 校验命令ID严格升序,为二分查找做铺垫
for(uint16_t i = 1; i < count; i++)
{
ASSERT(table[i].cmd_id > table[i-1].cmd_id);//断言命令字升序排列
}
s_cmd_count = 0;
for(uint16_t i = 0; i < count && i < CMD_MAX_COUNT; i++)
{
s_cmd_table[s_cmd_count++] = table[i];
}
return 0;
}
// 动态注册接口:模块上电自行注册指令
int dispatcher_register(uint16_t cmd_id, cmd_handler_fn handler, const char *name)
{
if(s_cmd_count >= CMD_MAX_COUNT)
return -1; // 命令池已满
if(handler == NULL)
return -2; // 处理函数为空非法
s_cmd_table[s_cmd_count].cmd_id = cmd_id;
s_cmd_table[s_cmd_count].handler = handler;
s_cmd_table[s_cmd_count].name = name;
s_cmd_count++;
return 0;
}
// 命令路由分发
int dispatcher_handle(uint16_t cmd_id, const uint8_t *payload, uint16_t len)
{
for(uint16_t i = 0; i < s_cmd_count; i++)
{
if(s_cmd_table[i].cmd_id == cmd_id)
{
return s_cmd_table[i].handler(payload, len);
}
}
return -1; // 未知命令
}
代码中有一处校验cmd_id升序的断言,目的是为了后续能将O(n)的“顺序遍历”优化为O(log n)的“二分查找”。
ASSERT(table[i].cmd_id > table[i-1].cmd_id);
//从第 2 个表项(下标 1)开始遍历,逐个和前一个表项(下标 i-1)对比;
//当前 cmd_id 必须严格大于前一个 cmd_id → 整张表 cmd_id 呈严格升序。
//目的是为了把「顺序遍历」改成「二分查找」,
//断言只在调试阶段查错使用,上线后可以删除ASSERT。
如果表内命令项已按ID严格升序排列,就可以用二分查找来加速匹配:
int dispatcher_handle(uint16_t cmd_id, const uint8_t *payload, uint16_t len)
{
uint16_t left = 0;
uint16_t right = s_cmd_count - 1;
while (left <= right)
{
uint16_t mid = (left + right) / 2;
if (s_cmd_table[mid].cmd_id == cmd_id)
{
return s_cmd_table[mid].handler(payload, len);
}
else if (s_cmd_table[mid].cmd_id < cmd_id)
{
left = mid + 1;
}
else
{
right = mid - 1;
}
}
return -1; // 未找到命令
}
3. 业务模块化注册示例
servo.c(纯驱动层,不依赖命令框架、不识协议)
#include "servo.h"
void Servo_Relieve_Stop(void)
{
// 解除急停硬件逻辑
}
void Servo_Stop(void)
{
// 舵机急停输出
}
servo_cmd.c(命令 + 业务翻译层,协议与驱动中间层)
#include "cmd_dispatcher.h"
#include "servo.h"
#define CMD_CTL_SERVO 0x03
// 指令处理回调:仅做报文解析、参数判断、调用底层驱动
static int Cmd_Device_Stop(const uint8_t *payload, uint16_t len)
{
if(len != 1)
return -1;
uint8_t device_state = payload[0];
switch(device_state)
{
case 0x01:
Servo_Relieve_Stop();
break;
case 0x02:
Servo_Stop();
break;
default:
return -2;
}
return 0;
}
// 模块初始化:自行注册本模块所有指令
void Servo_Cmd_Init(void)
{
dispatcher_register(CMD_CTL_SERVO, Cmd_Device_Stop, "cmd_device_stop");
}
4. 系统初始化调用逻辑
void My_Init(void)
{
Servo_Init(); // 硬件初始化
Sensor_Init();
Servo_Cmd_Init(); // 注册舵机相关命令
Sensor_Cmd_Init(); // 注册传感器相关命令
}
此时,整个架构的依赖关系发生了质变,各业务模块通过dispatcher_register()向核心分发器注册,实现了控制反转。
总结一下
查表式命令分发器的精髓就在于“分离变与不变”。我们让易变的业务逻辑(xxx_cmd.c)与不变的分发框架脱钩,从而提高整个系统的可维护性和可测试性。
- 小项目、快速原型,直接用静态命令表,简单省事。
- 产品化、多模块协作的项目,果断上动态注册,能让各模块独立开发、独立测试、独立复用。
这种“注册-回调”的设计模式,你是否已经在你的嵌入式项目中实践了呢?如果你还陷在if-else的地狱里,是时候做出改变了。
 发表于 昨天 23:04
|
查看: 5|
回复: 0
发表于 昨天 23:04
|
查看: 5|
回复: 0
