问题 ROS2-humble中 Moveit Setup Assistant的GUI界面中无法加载urdf文件,一点击需要加载的urdf文件之后就卡住
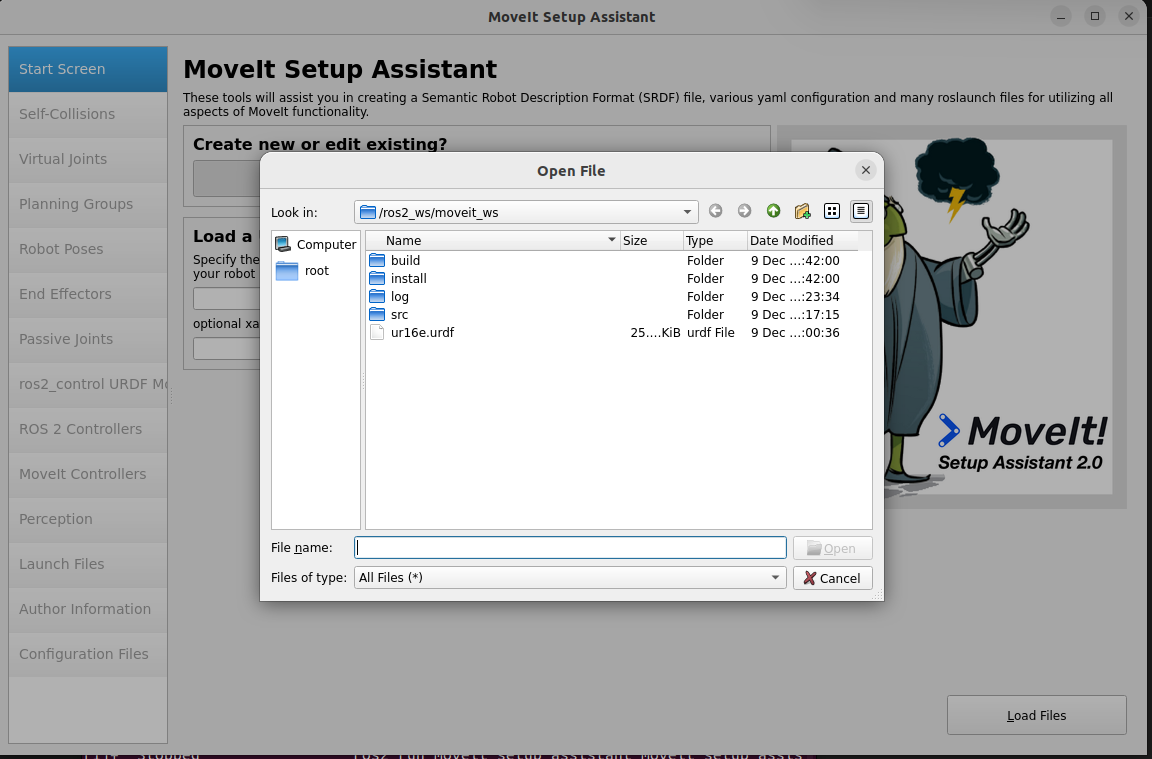
问题的出现的原因以及解决方法
原因 : 文件有问题???
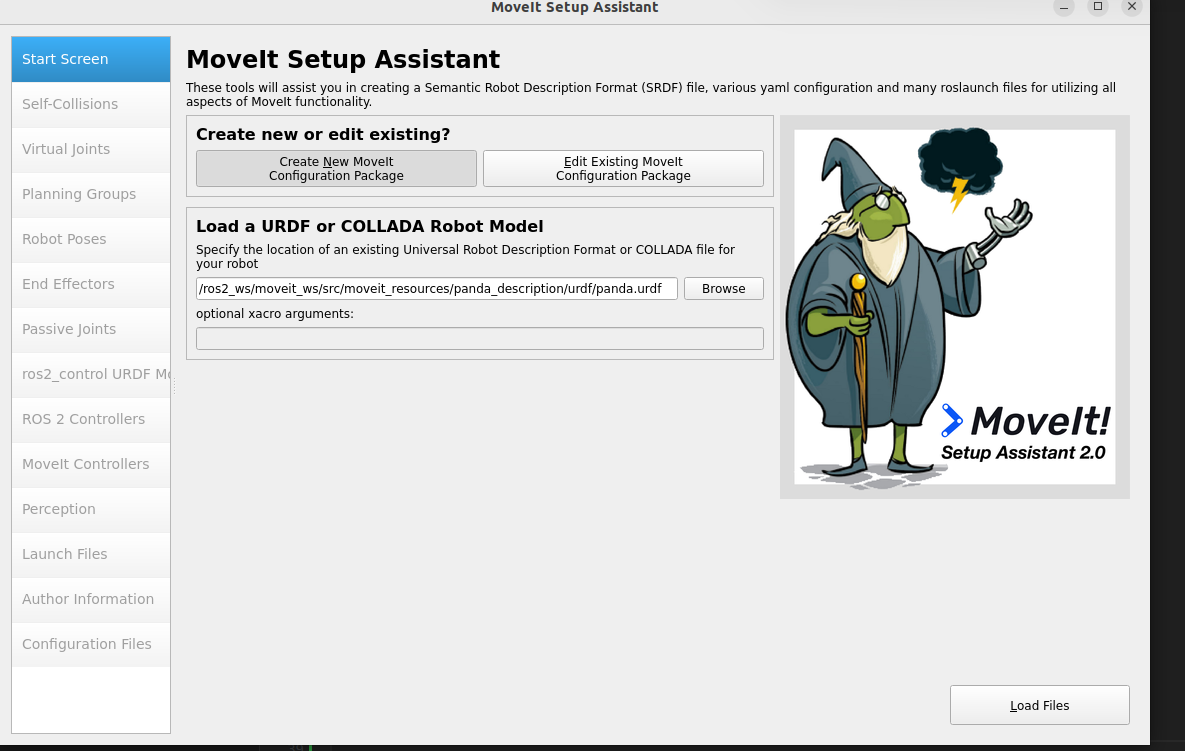 经过测试,发现加载moveit中自带的urdf文件非常顺利;所以原因只能有一个:
我之前导入的urdf文件是错误的!!!文件出了问题;
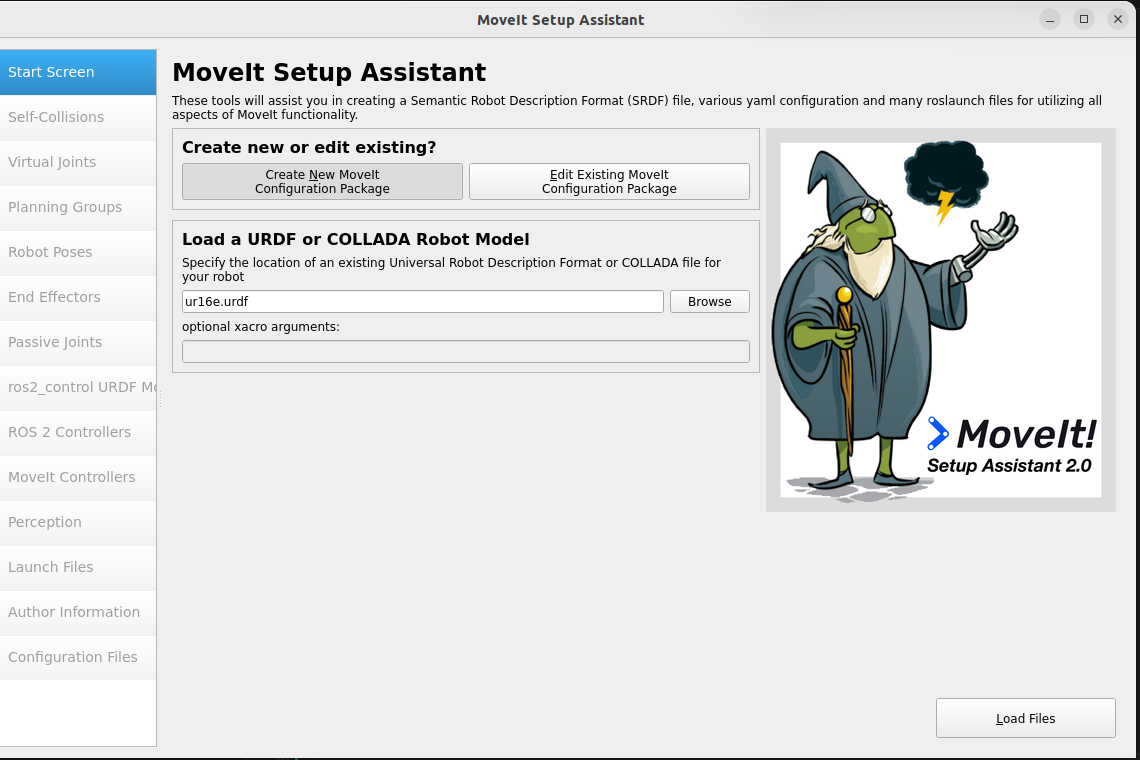
对了,我尝试导入的urdf文件是通过xacro生成的:
经过测试,发现加载moveit中自带的urdf文件非常顺利;所以原因只能有一个:
我之前导入的urdf文件是错误的!!!文件出了问题;
对了,我尝试导入的urdf文件是通过xacro生成的:
ros2 run xacro xacro /opt/ros/humble/share/ur_description/urdf/ur.urdf.xacro ur_type:=ur16e name:=ur16e > ur16e.urdf
解决办法 : 文件真的有问题吗??
如果不用GUI界面导入文件会怎么样
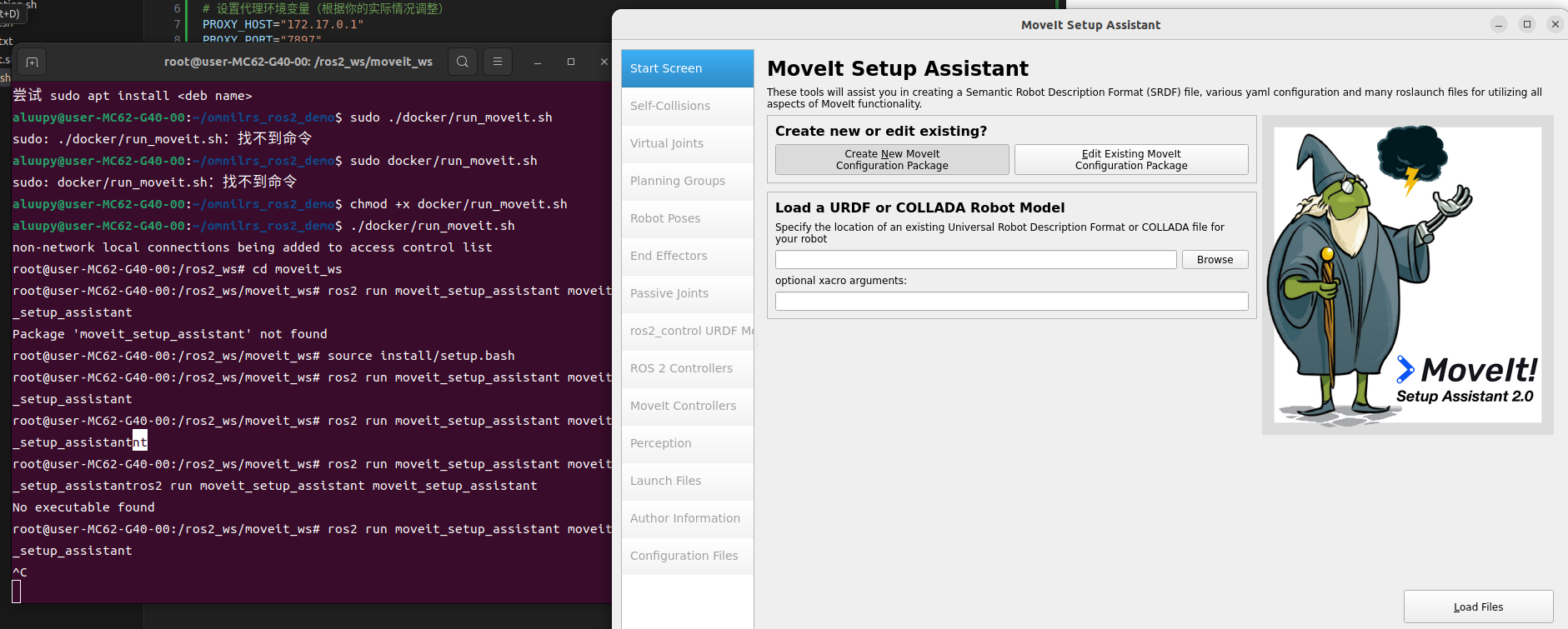
ros2 run moveit_setup_assistant moveit_setup_assistant --urdf_path ur16e.urdf # 指定urdf文件的路径
 可恶,这样居然可以成功导入!!!
后续测试可以正常使用相关功能.
可恶,这样居然可以成功导入!!!
后续测试可以正常使用相关功能.
环境与配置
ROS2-humble通过源代码安装(不是二进制安装方法)
|  发表于 2025-12-18 23:16:53
|
查看: 319|
回复: 0
发表于 2025-12-18 23:16:53
|
查看: 319|
回复: 0
