图论是计算机科学中研究图(由节点和边组成)的数学结构的学科,在路径规划、网络分析、任务调度等领域有广泛应用。掌握核心的图论算法,是应对技术面试与解决复杂工程问题的关键。本文将系统性地讲解几种基础的图论算法及其实现,涵盖环检测、拓扑排序、二分图判定,并延伸至并查集、最小生成树和最短路径算法。
图的邻接表表示法
许多图算法都基于邻接表来实现。以下是一个通用的建图函数,适用于表示课程依赖等有向关系。
List<Integer>[] buildGraph(int numCourses, int[][] prerequisites) {
// 图中共有 numCourses 个节点
List<Integer>[] graph = new LinkedList[numCourses];
for (int i = 0; i < numCourses; i++) {
graph[i] = new LinkedList<>();
}
for (int[] edge : prerequisites) {
int from = edge[1], to = edge[0];
// 添加一条从 from 指向 to 的有向边
// 边的方向是「被依赖」关系,即修完课程 from 才能修课程 to
graph[from].add(to);
}
return graph;
}
环检测算法
检测图中是否存在环是许多应用的前提,例如判断任务依赖是否可行。主要有深度优先搜索(DFS)和广度优先搜索(BFS)两种思路。
DFS 实现
DFS通过维护一个递归栈路径(onPath数组)来检测环。如果某个节点在本次递归路径上被重复访问,则说明存在环。
// 记录一次递归堆栈中的节点
boolean[] onPath;
// 记录遍历过的节点,防止走回头路
boolean[] visited;
// 记录图中是否有环
boolean hasCycle = false;
boolean canFinish(int numCourses, int[][] prerequisites) {
List<Integer>[] graph = buildGraph(numCourses, prerequisites);
visited = new boolean[numCourses];
onPath = new boolean[numCourses];
for (int i = 0; i < numCourses; i++) {
// 遍历图中的所有节点
traverse(graph, i);
}
// 只要没有循环依赖就可以完成所有课程
return !hasCycle;
}
void traverse(List<Integer>[] graph, int s) {
if (onPath[s]) {
// 出现环
hasCycle = true;
}
if (visited[s] || hasCycle) {
// 如果已经找到了环,也不用再遍历了
return;
}
// 前序代码位置
visited[s] = true;
onPath[s] = true;
for (int t : graph[s]) {
traverse(graph, t);
}
// 后序代码位置
onPath[s] = false;
}
BFS 实现(拓扑排序思想)
BFS方法利用拓扑排序的思想,通过计算节点的入度来实现。不断将入度为0的节点从图中移除,如果最终所有节点都能被移除,则说明图中无环。
// 主函数
public boolean canFinish(int numCourses, int[][] prerequisites) {
// 建图,有向边代表「被依赖」关系
List<Integer>[] graph = buildGraph(numCourses, prerequisites);
// 构建入度数组
int[] indgree = new int[numCourses];
for (int[] edge : prerequisites) {
int from = edge[1], to = edge[0];
// 节点 to 的入度加一
indgree[to]++;
}
// 根据入度初始化队列中的节点
Queue<Integer> q = new LinkedList<>();
for (int i = 0; i < numCourses; i++) {
if (indgree[i] == 0) {
// 节点 i 没有入度,即没有依赖的节点
// 可以作为拓扑排序的起点,加入队列
q.offer(i);
}
}
// 记录遍历的节点个数
int count = 0;
// 开始执行 BFS 循环
while (!q.isEmpty()) {
// 弹出节点 cur,并将它指向的节点的入度减一
int cur = q.poll();
count++;
for (int next : graph[cur]) {
indgree[next]--;
if (indgree[next] == 0) {
// 如果入度变为 0,说明 next 依赖的节点都已被遍历
q.offer(next);
}
}
}
// 如果所有节点都被遍历过,说明不成环
return count == numCourses;
}
这段 BFS 算法的核心思路如下:
- 构建邻接表和入度数组。
- 将入度为 0 的节点入队。
- 不断弹出队首节点,并将其邻接节点的入度减一,若减为0则入队。
- 若最终处理的节点数等于总节点数,则无环,反之有环。
拓扑排序算法
对一个有向无环图(DAG)进行拓扑排序,是将所有顶点排成一个线性序列,使得对于任何有向边 (u, v),u 在序列中都出现在 v 之前。这常用于任务调度、编译顺序确定等场景。
DFS 实现
DFS实现利用后序遍历,拓扑排序结果是后序遍历结果的逆序。
// 记录后序遍历结果
List<Integer> postorder = new ArrayList<>();
// 记录是否存在环
boolean hasCycle = false;
boolean[] visited, onPath;
// 主函数
public int[] findOrder(int numCourses, int[][] prerequisites) {
List<Integer>[] graph = buildGraph(numCourses, prerequisites);
visited = new boolean[numCourses];
onPath = new boolean[numCourses];
// 遍历图
for (int i = 0; i < numCourses; i++) {
traverse(graph, i);
}
// 有环图无法进行拓扑排序
if (hasCycle) {
return new int[]{};
}
// 逆后序遍历结果即为拓扑排序结果
Collections.reverse(postorder);
int[] res = new int[numCourses];
for (int i = 0; i < numCourses; i++) {
res[i] = postorder.get(i);
}
return res;
}
// 图遍历函数
void traverse(List<Integer>[] graph, int s) {
if (onPath[s]) {
// 发现环
hasCycle = true;
}
if (visited[s] || hasCycle) {
return;
}
// 前序遍历位置
onPath[s] = true;
visited[s] = true;
for (int t : graph[s]) {
traverse(graph, t);
}
// 后序遍历位置
postorder.add(s);
onPath[s] = false;
}
BFS 实现
BFS实现与环检测的BFS算法几乎一致,只是在弹出节点时记录顺序,该顺序即为拓扑排序结果。
// 主函数
public int[] findOrder(int numCourses, int[][] prerequisites) {
// 建图,和环检测算法相同
List<Integer>[] graph = buildGraph(numCourses, prerequisites);
// 计算入度,和环检测算法相同
int[] indgree = new int[numCourses];
for (int[] edge : prerequisites) {
int from = edge[1], to = edge[0];
indgree[to]++;
}
// 根据入度初始化队列中的节点,和环检测算法相同
Queue<Integer> q = new LinkedList<>();
for (int i = 0; i < numCourses; i++) {
if (indgree[i] == 0) {
q.offer(i);
}
}
// 记录拓扑排序结果
int[] res = new int[numCourses];
// 记录遍历节点的顺序(索引)
int count = 0;
// 开始执行 BFS 算法
while (!q.isEmpty()) {
int cur = q.poll();
// 弹出节点的顺序即为拓扑排序结果
res[count] = cur;
count++;
for (int next : graph[cur]) {
indgree[next]--;
if (indgree[next] == 0) {
q.offer(next);
}
}
}
if (count != numCourses) {
// 存在环,拓扑排序不存在
return new int[]{};
}
return res;
}
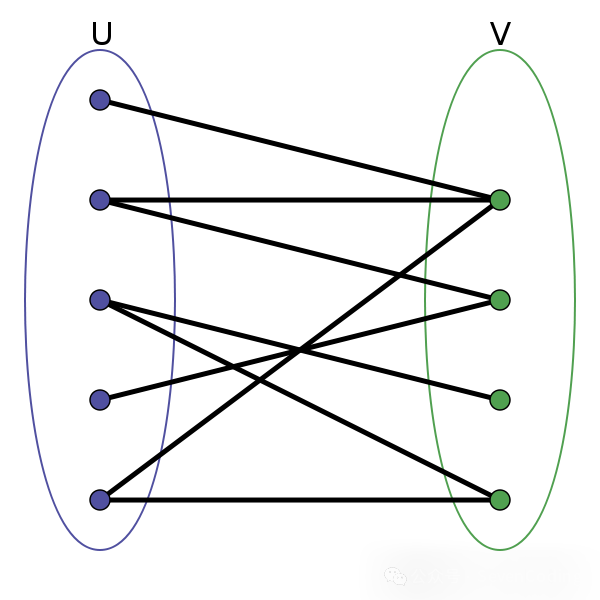
二分图判定算法
二分图的顶点集可分割为两个互不相交的子集,图中每条边的两个顶点分属于这两个子集,且同一子集内的顶点不相邻。二分图判定问题可以抽象为:能否用两种颜色为图着色,使得任意一条边两端的颜色不同?
DFS 实现
通过DFS遍历,尝试为相邻节点涂上不同颜色,如果冲突则不是二分图。
// 记录图是否符合二分图性质
private boolean ok = true;
// 记录图中节点的颜色,false 和 true 代表两种不同颜色
private boolean[] color;
// 记录图中节点是否被访问过
private boolean[] visited;
// 主函数,输入邻接表,判断是否是二分图
public boolean isBipartite(int[][] graph) {
int n = graph.length;
color = new boolean[n];
visited = new boolean[n];
// 因为图不一定是联通的,可能存在多个子图
// 所以要把每个节点都作为起点进行一次遍历
// 如果发现任何一个子图不是二分图,整幅图都不算二分图
for (int v = 0; v < n; v++) {
if (!visited[v]) {
traverse(graph, v);
}
}
return ok;
}
// DFS 遍历框架
private void traverse(int[][] graph, int v) {
// 如果已经确定不是二分图了,就不用浪费时间再递归遍历了
if (!ok) return;
visited[v] = true;
for (int w : graph[v]) {
if (!visited[w]) {
// 相邻节点 w 没有被访问过
// 那么应该给节点 w 涂上和节点 v 不同的颜色
color[w] = !color[v];
// 继续遍历 w
traverse(graph, w);
} else {
// 相邻节点 w 已经被访问过
// 根据 v 和 w 的颜色判断是否是二分图
if (color[w] == color[v]) {
// 若相同,则此图不是二分图
ok = false;
}
}
}
}
BFS 实现
思路与DFS一致,使用队列进行层次遍历。
// 记录图是否符合二分图性质
private boolean ok = true;
// 记录图中节点的颜色,false 和 true 代表两种不同颜色
private boolean[] color;
// 记录图中节点是否被访问过
private boolean[] visited;
public boolean isBipartite(int[][] graph) {
int n = graph.length;
color = new boolean[n];
visited = new boolean[n];
for (int v = 0; v < n; v++) {
if (!visited[v]) {
// 改为使用 BFS 函数
bfs(graph, v);
}
}
return ok;
}
// 从 start 节点开始进行 BFS 遍历
private void bfs(int[][] graph, int start) {
Queue<Integer> q = new LinkedList<>();
visited[start] = true;
q.offer(start);
while (!q.isEmpty() && ok) {
int v = q.poll();
// 从节点 v 向所有相邻节点扩散
for (int w : graph[v]) {
if (!visited[w]) {
// 相邻节点 w 没有被访问过
// 那么应该给节点 w 涂上和节点 v 不同的颜色
color[w] = !color[v];
// 标记 w 节点,并放入队列
visited[w] = true;
q.offer(w);
} else {
// 相邻节点 w 已经被访问过
// 根据 v 和 w 的颜色判断是否是二分图
if (color[w] == color[v]) {
// 若相同,则此图不是二分图
ok = false;
}
}
}
}
}
Union-Find(并查集)算法
当需要频繁判断两个元素是否属于同一集合时,并查集是高效的数据结构。其核心功能是合并(Union)集合与查询(Find)元素所属集合。
核心思想与API
并查集使用树形结构表示集合,根节点作为代表元素。主要API如下:
class UF {
/* 将 p 和 q 连接 */
public void union(int p, int q);
/* 判断 p 和 q 是否连通 */
public boolean connected(int p, int q);
/* 返回图中有多少个连通分量 */
public int count();
}
基础实现
初始化时,每个节点指向自己。合并时,将一个集合的根节点连接到另一个集合的根节点。
class UF {
// 记录连通分量
private int count;
// 节点 x 的父节点是 parent[x]
private int[] parent;
/* 构造函数,n 为图的节点总数 */
public UF(int n) {
// 一开始互不连通
this.count = n;
// 父节点指针初始指向自己
parent = new int[n];
for (int i = 0; i < n; i++)
parent[i] = i;
}
public void union(int p, int q) {
int rootP = find(p);
int rootQ = find(q);
if (rootP == rootQ)
return;
// 将两棵树合并为一棵
parent[rootP] = rootQ;
// parent[rootQ] = rootP 也一样
count--; // 两个分量合二为一
}
/* 返回某个节点 x 的根节点 */
private int find(int x) {
// 根节点的 parent[x] == x
while (parent[x] != x)
x = parent[x];
return x;
}
public boolean connected(int p, int q) {
int rootP = find(p);
int rootQ = find(q);
return rootP == rootQ;
}
public int count() {
return count;
}
}
此基础版本find操作最坏时间复杂度为O(N)。
平衡性优化
为避免合并时树退化成链表,引入size数组记录树的节点数(重量),总是将小树接到大树下。
class UF {
private int count;
private int[] parent;
// 新增数组记录树的“重量”
private int[] size;
public UF(int n) {
this.count = n;
parent = new int[n];
size = new int[n];
for (int i = 0; i < n; i++) {
parent[i] = i;
size[i] = 1; // 最初每棵树只有一个节点
}
}
public void union(int p, int q) {
int rootP = find(p);
int rootQ = find(q);
if (rootP == rootQ)
return;
// 小树接到大树下面,较平衡
if (size[rootP] > size[rootQ]) {
parent[rootQ] = rootP;
size[rootP] += size[rootQ];
} else {
parent[rootP] = rootQ;
size[rootQ] += size[rootP];
}
count--;
}
// ... find, connected, count 方法
}
优化后时间复杂度降至O(logN)。
路径压缩
进一步优化,使树高保持常数。在find时直接将节点连接到根节点。
// 推荐:递归式路径压缩
public int find(int x) {
if (parent[x] != x) {
parent[x] = find(parent[x]);
}
return parent[x];
}
使用路径压缩后,union、connected、count操作的平均时间复杂度接近O(1)。通常可省略size优化。
最终推荐实现:
class UF {
private int count;
private int[] parent;
public UF(int n) {
this.count = n;
parent = new int[n];
for (int i = 0; i < n; i++) {
parent[i] = i;
}
}
public void union(int p, int q) {
int rootP = find(p);
int rootQ = find(q);
if (rootP == rootQ) return;
parent[rootQ] = rootP;
count--;
}
public boolean connected(int p, int q) {
return find(p) == find(q);
}
public int find(int x) {
if (parent[x] != x) {
parent[x] = find(parent[x]);
}
return parent[x];
}
public int count() {
return count;
}
}
应用场景
- Kruskal最小生成树算法:用于判断加入边是否会形成环。
- 动态连通性问题:如社交网络好友关系、网络连接状态。
- 等价类划分:编译器中的变量别名分析等。
Kruskal 最小生成树算法
最小生成树(MST)是连通加权无向图中权重和最小的生成树。Kruskal算法是贪心算法,核心是排序所有边并使用并查集。
算法步骤
- 将所有边按权重从小到大排序。
- 依次遍历每条边,若该边连接的两个顶点不在同一连通分量中(用并查集判断),则加入MST并合并这两个分量。
- 重复步骤2,直到MST包含所有顶点或遍历完所有边。
int minimumCost(int n, int[][] connections) {
// 城市编号为 1...n,所以初始化大小为 n + 1
UF uf = new UF(n + 1);
// 对所有边按照权重从小到大排序
Arrays.sort(connections, (a, b) -> (a[2] - b[2]));
// 记录最小生成树的权重之和
int mst = 0;
for (int[] edge : connections) {
int u = edge[0];
int v = edge[1];
int weight = edge[2];
// 若这条边会产生环,则不能加入 mst
if (uf.connected(u, v)) {
continue;
}
// 若这条边不会产生环,则属于最小生成树
mst += weight;
uf.union(u, v);
}
// 保证所有节点都被连通
return uf.count() == 2 ? mst : -1; // 节点0未被使用,占用一个分量
}
复杂度:时间复杂度O(ElogE)(主要来自排序),空间复杂度O(V+E)。
Prim 最小生成树算法
Prim算法也是贪心算法,基于「切分定理」:任意切分中,权重最小的横切边必属于最小生成树。算法从一个顶点开始,逐步扩展MST。
算法实现
使用优先级队列动态维护当前切分的横切边。
class Prim {
private PriorityQueue<int[]> pq; // 存储横切边
private boolean[] inMST; // 记录节点是否在MST中
private int weightSum = 0;
private List<int[]>[] graph; // 邻接表,边为 {from, to, weight}
public Prim(List<int[]>[] graph) {
this.graph = graph;
int n = graph.length;
this.pq = new PriorityQueue<>((a, b) -> a[2] - b[2]);
this.inMST = new boolean[n];
// 从节点0开始切分
inMST[0] = true;
cut(0);
while (!pq.isEmpty()) {
int[] edge = pq.poll();
int to = edge[1];
int weight = edge[2];
if (inMST[to]) continue; // 会形成环,跳过
weightSum += weight;
inMST[to] = true;
cut(to); // 新节点加入,进行新一轮切分
}
}
private void cut(int s) {
for (int[] edge : graph[s]) {
int to = edge[1];
if (!inMST[to]) {
pq.offer(edge);
}
}
}
public int weightSum() { return weightSum; }
public boolean allConnected() { /* 检查inMST */ }
}
复杂度:时间复杂度O(ElogE),空间复杂度O(E)。
Dijkstra 最短路径算法
Dijkstra算法用于计算加权图中单一起点到所有其他节点的最短路径(权重非负)。
算法思想与实现
使用BFS+优先级队列,distTo数组记录最短距离。不同于普通BFS,节点可能被多次访问,但只取距离最小的一次。
class State {
int id;
int distFromStart;
State(int id, int distFromStart) {
this.id = id;
this.distFromStart = distFromStart;
}
}
int[] dijkstra(int start, List<int[]>[] graph) {
int V = graph.length;
int[] distTo = new int[V];
Arrays.fill(distTo, Integer.MAX_VALUE);
distTo[start] = 0;
PriorityQueue<State> pq = new PriorityQueue<>((a, b) -> a.distFromStart - b.distFromStart);
pq.offer(new State(start, 0));
while (!pq.isEmpty()) {
State curState = pq.poll();
int curNodeID = curState.id;
int curDistFromStart = curState.distFromStart;
if (curDistFromStart > distTo[curNodeID]) {
continue; // 已有更优路径
}
for (int[] edge : graph[curNodeID]) {
int nextNodeID = edge[1];
int weight = edge[2];
int distToNextNode = distTo[curNodeID] + weight;
if (distTo[nextNodeID] > distToNextNode) {
distTo[nextNodeID] = distToNextNode;
pq.offer(new State(nextNodeID, distToNextNode));
}
}
}
return distTo;
}
若只求起点到终点的距离,可在从队列中取出节点时判断是否为终点。
A* 搜索算法
A*是启发式搜索算法,结合了Dijkstra的完备性和贪心搜索的效率,用于已知目标节点的路径规划。在技术面试尤其是LeetCode等算法平台中,理解其与BFS、Dijkstra的区别至关重要。
核心思想
A*定义评估函数 f(n) = g(n) + h(n):
- g(n):从起点到节点n的实际代价。
- h(n):从节点n到目标点的预估代价(启发函数)。
算法优先探索f(n)值最小的节点。
启发函数选择
常见的启发函数(用于网格地图)有:
- 曼哈顿距离:
d = |x1-x2| + |y1-y2|
- 欧几里得距离:
d = sqrt((x1-x2)^2 + (y1-y2)^2)
- 切比雪夫距离:
d = max(|x1-x2|, |y1-y2|)
代码实现(欧几里得距离)
class Node {
int x, y;
double gCost, hCost, fCost;
Node parent;
public Node(int x, int y) { this.x = x; this.y = y; }
public double calculateHeuristic(Node target) {
return Math.sqrt(Math.pow(x - target.x, 2) + Math.pow(y - target.y, 2));
}
public void updateCosts(Node target, double gCost) {
this.gCost = gCost;
this.hCost = calculateHeuristic(target);
this.fCost = this.gCost + this.hCost;
}
// 重写 equals 和 hashCode
}
class AStar {
private static final int[][] DIRECTIONS = {{1,0},{-1,0},{0,1},{0,-1},{1,1},{1,-1},{-1,1},{-1,-1}};
public List<Node> findPath(Node start, Node target, int[][] grid) {
Set<Node> openSet = new HashSet<>();
Set<Node> closedSet = new HashSet<>();
PriorityQueue<Node> pq = new PriorityQueue<>(Comparator.comparingDouble(n -> n.fCost));
start.updateCosts(target, 0);
openSet.add(start);
pq.add(start);
while (!openSet.isEmpty()) {
Node current = pq.poll();
openSet.remove(current);
closedSet.add(current);
if (current.equals(target)) {
return reconstructPath(current);
}
for (int[] dir : DIRECTIONS) {
int newX = current.x + dir[0], newY = current.y + dir[1];
if (!isInBounds(newX, newY, grid) || grid[newX][newY] == 1) continue;
Node neighbor = new Node(newX, newY);
if (closedSet.contains(neighbor)) continue;
double tentativeGCost = current.gCost + current.calculateHeuristic(neighbor);
if (!openSet.contains(neighbor) || tentativeGCost < neighbor.gCost) {
neighbor.updateCosts(target, tentativeGCost);
neighbor.parent = current;
if (!openSet.contains(neighbor)) {
openSet.add(neighbor);
pq.add(neighbor);
}
}
}
}
return Collections.emptyList();
}
private boolean isInBounds(int x, int y, int[][] grid) { ... }
private List<Node> reconstructPath(Node node) { ... }
}
对比与总结
- BFS:无权图最短路径,时间复杂度O(V+E)。
- Dijkstra:带权非负图最短路径,保证最优,但可能探索过多节点。
- A:有明确目标点的路径搜索,通过启发函数引导方向,效率通常更高,在启发函数可采纳(估计值不大于真实值)时保证最优解。
- 局限性:A需要明确的目标点。对于多目标找最近或未知目标搜索,Dijkstra或BFS更合适。A的空间消耗可能较高,对此有IDA*等优化变种。
掌握这些基础图论算法及其实现,能够帮助开发者有效解决涉及图结构数据的复杂问题,是提升算法与数据结构能力的核心环节。从环检测、拓扑排序到最短路径规划,理解其背后的DFS、BFS以及并查集思想,并能在不同场景下选择合适的算法,是进行高效、可靠系统设计与开发的重要基础。
 发表于 2025-12-23 23:44:32
|
查看: 210|
回复: 0
发表于 2025-12-23 23:44:32
|
查看: 210|
回复: 0
