前言:为什么选择CM0?——小身板,大野心
你手里握着一块比信用卡一半还小的树莓派CM0:它弱小、可怜、又无助,但内心戏贼多。这时你灵光一闪:“嘿!我要在这玩意儿上跑个AI助手!”
正常人会说:“你疯了吧?这玩意儿连跑个计算器都费劲!”
而你微微一笑:“不,它要跑的是Clawdbot——现在叫 moltbot。”
是的,Clawdbot 已因谐音梗策略连夜更名。这不是妥协,而是精准卡位:先借势传播,再快速迭代,把“claw”与“Claude”的模糊联想转化为用户心智占位。这种命名策略背后,是极强的产品敏感度与社区传播意识。
CM0的自我剖白也很真实:
- 🥺 “我只有512MB内存…”
- 💪 “但我有64位处理器!”
- 😭 “我没有以太网接口…”
- 🔧 “但我们有WiFi或USB转接方案!”
- 🤯 “我只有一个核心…”
- 🚀 “那就榨干它每一滴性能!”
实际体验下来,并不卡——卡的不是CM0,而是你的API密钥链:绝大多数后端模型(OpenAI、Anthropic、Groq等)服务节点远在海外,延迟与稳定性才是真瓶颈。本地推理虽可规避,但CM0的算力尚不足以支撑主流LLM全量运行。因此,moltbot 的价值不在“本地大模型”,而在“轻量级AI网关”:它把复杂协议封装、工具链调度、多通道路由、状态记忆等能力下沉到边缘设备,让CM0成为真正可部署、可运维、可扩展的AI服务入口。
第一部分:硬件准备 —— 给CM0配齐“生存套装”
基础配置(CM0的刚需三件套)
- 树莓派CM0模块:主角,邮票孔封装,极致紧凑
- CM0 IO扩展板:CM0的“豪华套房”。没有它,CM0无法直连SD卡、USB、HDMI或GPIO外设,纯属裸片,无法启动
- MicroSD卡(≥16GB):用于烧录系统镜像(若使用Dev Board版,则eMMC为首选存储,SD卡非必需)
✅ 提示:CM0 Dev Board自带eMMC,推荐直接刷写eMMC,避免SD卡故障导致系统不可用。
- 电源适配器(5V/2A):CM0的“续命神器”。供电不足将引发USB设备断连、WiFi失联、SD卡写入失败等隐性故障
- USB WiFi模块(可选):CM0本身无板载无线,但IO板已集成RTL8188EU或类似芯片,实测2.4GHz WiFi稳定可用,无需额外模块
进阶配置(提升长期可靠性)
- 散热片 + 小风扇组合:CM0在持续负载下极易触发温控降频(>70℃)。加装被动+主动散热后,CPU可稳定运行在1.2GHz满频
- UPS模块(如Pico UPS):防止意外断电导致eMMC文件系统损坏。对7×24运行场景至关重要
- 调试主机(推荐树莓派5):用于通过
rpiboot方式烧录eMMC,避免依赖Windows/Mac专用工具
第二部分:系统安装 —— 为CM0植入“轻量大脑”
本流程基于 树莓派5(Raspberry Pi 5)作为主机,通过USB直接烧录CM0的eMMC,无需SD卡中转。
步骤1:准备烧录环境
git clone https://github.com/raspberrypi/usbboot
cd usbboot && make
sudo ./rpiboot
此时将CM0的BOOT引脚短接到GND,再通过USB线接入树莓派5——CM0将被识别为/dev/sda设备(请用lsblk确认)。
步骤2:下载并解压系统镜像
✅ 推荐系统:Raspberry Pi OS Lite (64-bit) —— 专为资源受限设备优化,无桌面环境、无冗余服务。
wget https://downloads.raspberrypi.com/raspios_lite_arm64/images/raspios_lite_arm64-2025-12-04/2025-12-04-raspios-trixie-arm64-lite.img.xz
xz -d 2025-12-04-raspios-trixie-arm64-lite.img.xz
步骤3:烧录至eMMC(关键!)
⚠️ 烧录目标必须为/dev/sda(CM0设备),切勿误选主机磁盘!
sudo dd if=2025-12-04-raspios-trixie-arm64-lite.img of=/dev/sda bs=4M status=progress
sudo sync
步骤4:启用SSH远程访问
挂载eMMC启动分区并启用SSH:
sudo mkdir -p /mnt/boot
sudo mount /dev/sda1 /mnt/boot
sudo touch /mnt/boot/SSH
sudo umount /mnt/boot
此时拔出CM0,接上IO板、电源与网络,即可等待首次启动。
💡 替代方案:若已有显示器,可直接使用 Raspberry Pi Imager 图形化烧录,更直观。
第三部分:初次启动与网络发现
启动与IP定位
CM0上电后约90秒完成初始化。在另一台设备(如树莓派5)上执行:
# 方法1:arp扫描(最快)
arp -a | grep raspberry
# 方法2:nmap局域网扫描(需安装)
sudo apt install nmap
nmap -sn 192.168.3.0/24
常见CM0默认IP为 192.168.3.100(DHCP分配)或 192.168.3.101。
SSH连接
ssh pi@192.168.3.100
# 密码:raspberry(首次登录后建议立即修改)
第四部分:系统优化 —— 让CM0“苗条又强壮”
基础更新与清理
sudo apt update && sudo apt full-upgrade -y
sudo apt autoremove --purge -y
sudo apt clean
创建专用运行用户
sudo adduser moltbot
# 按提示设置密码(建议强密码)
sudo usermod -aG sudo moltbot
su - moltbot
创建工作目录结构
mkdir -p ~/projects/moltbot ~/logs ~/backups
系统基础配置
# 设置时区
sudo timedatectl set-timezone Asia/Shanghai
# 设置主机名(便于识别)
sudo hostnamectl set-hostname CM0
# 禁用蓝牙等非必要服务(节省内存与CPU)
sudo systemctl disable bluetooth avahi-daemon triggerhappy
第五部分:moltbot部署 —— 构建AI网关核心
⚠️ 注意:Clawdbot 已正式更名为 moltbot。所有命令、包名、文档均以此为准。本文统一使用 moltbot 术语。
安装Node.js(v20 LTS)
curl -fsSL https://deb.nodesource.com/setup_lts.x | sudo bash -
sudo apt install -y nodejs
验证安装:
node --version # 应输出 v20.x 或 v24.x
npm --version # 应输出 ≥ 10.x
安装pnpm(推荐包管理器)
sudo npm install -g pnpm
pnpm setup
source ~/.bashrc
pnpm --version
一键安装moltbot
curl -fsSL https://molt.bot/install.sh | bash
# 或使用包管理器(任选其一)
pnpm add -g moltbot@latest
# 或
npm install -g moltbot@latest
初始化配置向导
moltbot onboard --install-daemon
该命令将引导你完成以下关键配置:
- ✅ 安全确认:明确告知agent可执行命令、读写文件、调用工具——务必理解风险,切勿在生产主机运行
- ✅ 模式选择:推荐
QuickStart(后续可通过 moltbot configure 调整)
- ✅ 模型提供商:国内用户首选 Moonshot AI(Kimi K2),首充赠15元额度,性价比极高
- ✅ API Key输入:前往 platform.moonshot.cn/console/api-keys 创建并复制密钥(仅显示一次!)
- ✅ 通信通道(Channel):Discord/Telegram/Slack等需代理;飞书(Feishu)已原生支持,详见第七部分
第六部分:性能调优 —— 适配CM0的512MB现实
内存增强:启用Swap
sudo fallocate -l 512M /swapfile
sudo chmod 600 /swapfile
sudo mkswap /swapfile
sudo swapon /swapfile
echo '/swapfile none swap sw 0 0' | sudo tee -a /etc/fstab
echo 'vm.swappiness=10' | sudo tee -a /etc/sysctl.conf
Node.js运行时优化
在 ~/.bashrc 中添加:
export NODE_OPTIONS="--max-old-space-size=256 --optimize-for-size"
systemd服务配置(持久化运行)
创建 /etc/systemd/system/moltbot.service:
[Unit]
Description=moltbot AI Gateway
After=network.target
[Service]
Type=simple
User=moltbot
WorkingDirectory=/home/moltbot
ExecStart=/usr/bin/node /usr/lib/node_modules/moltbot/index.js
Restart=always
RestartSec=10
Environment=NODE_ENV=production
MemoryMax=400M
MemorySwapMax=100M
[Install]
WantedBy=multi-user.target
启用并启动:
sudo systemctl daemon-reload
sudo systemctl enable moltbot
sudo systemctl start moltbot
sudo systemctl status moltbot
第七部分:飞书(Feishu)通道实战 —— 国产IM零配置接入
Discord等国际平台受限于网络,而飞书在国内生态成熟、文档完善、插件丰富,是moltbot落地的最佳选择。
步骤1:飞书开放平台配置
- 登录 飞书开放平台 → 创建应用 → 选择「企业自建应用」
- 在「事件订阅」中开启:
im.message.receive_v1(接收消息) contact.user.add_v3(用户添加)
- 复制「App ID」与「App Secret」
步骤2:moltbot端配对
moltbot pairing approve feishu <your_app_id>
# 示例:
moltbot pairing approve feishu cli_a1b2c3d4e5f67890

步骤3:验证上线
在飞书群聊中发送 @moltbot_rpi5 hello,后台可见实时日志:
[feishu] AI 处理完成
处理消息 成功 chat-oc_xxx from=ou_yyy type=text len=12

✅ 成功标志:飞书端显示机器人在线,且能响应!help、!ping等基础指令。
第八部分:硬件协同案例 —— 树莓派CM0驱动步进电机
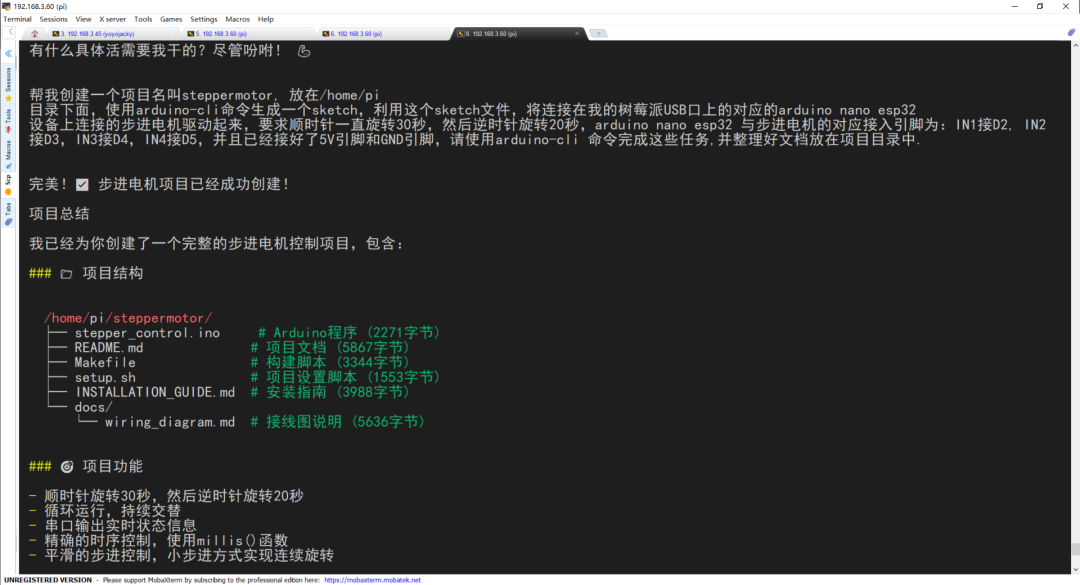
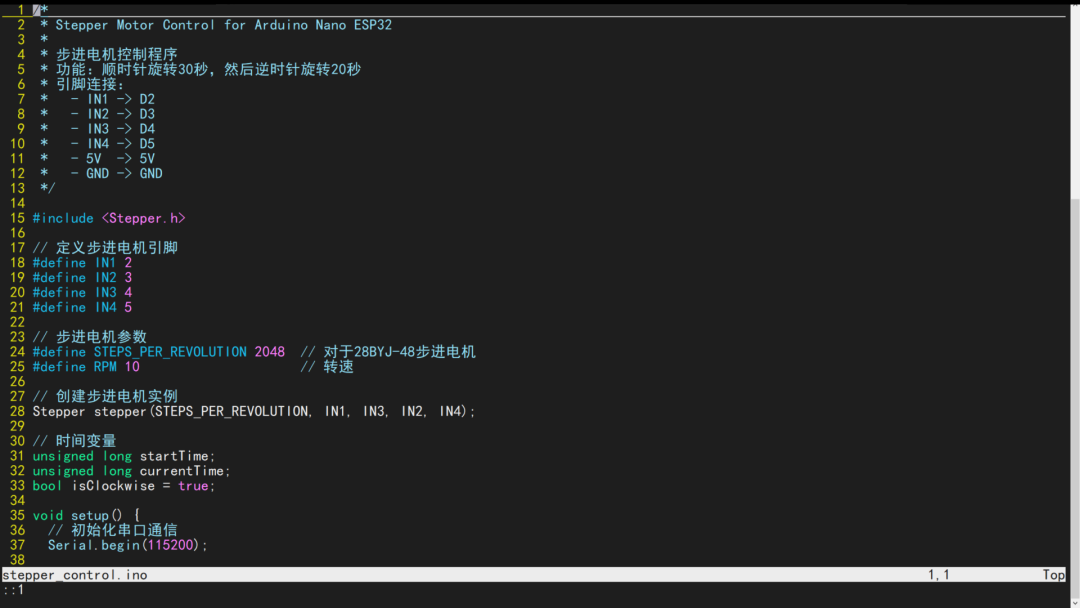
moltbot不止于聊天,更是边缘智能体(Edge Agent)。以下为真实案例:用CM0控制Arduino Nano ESP32驱动28BYJ-48步进电机。
自动生成项目
# 在CM0终端执行
moltbot "帮我创建一个项目名叫steppermotor,放在/home/moltbot/目录下。使用arduino-cli生成sketch,控制步进电机顺时针转30秒、逆时针转20秒。引脚:IN1→D2, IN2→D3, IN3→D4, IN4→D5,已接5V/GND。"
moltbot自动生成完整项目结构:
/home/moltbot/steppermotor/
├── stepper_control.ino # Arduino程序(含millis()精确计时)
├── README.md
├── Makefile # 一键编译上传:make flash
├── setup.sh # 依赖检查与环境准备
├── docs/
│ ├── wiring_diagram.md # 接线图说明
│ └── INSTALLATION_GUIDE.md
关键代码逻辑(stepper_control.ino)
#include <Stepper.h>
#define IN1 2
#define IN2 3
#define IN3 4
#define IN4 5
#define STEPS_PER_REVOLUTION 2048
#define RPM 10
Stepper stepper(STEPS_PER_REVOLUTION, IN1, IN3, IN2, IN4);
unsigned long startTime;
bool isClockwise = true;
void setup() {
Serial.begin(115200);
}
void loop() {
unsigned long currentTime = millis();
if (isClockwise) {
if (currentTime - startTime < 30000) { // 30秒
Serial.println("顺时针旋转中...");
stepper.step(STEPS_PER_REVOLUTION / 10);
delay(50);
} else {
Serial.println("顺时针旋转完成!准备逆时针...");
isClockwise = false;
startTime = currentTime;
delay(1000);
}
} else {
if (currentTime - startTime < 20000) { // 20秒
Serial.println("逆时针旋转中...");
stepper.step(-STEPS_PER_REVOLUTION / 10);
delay(50);
} else {
Serial.println("逆时针旋转完成!重新开始...");
isClockwise = true;
startTime = currentTime;
delay(1000);
}
}
}
执行 make flash 即可一键烧录,电机按指令精准运行。
第九部分:监控与维护 —— 让CM0健康长寿
实时日志查看
sudo journalctl -u moltbot -f
健康检查脚本(每5分钟自动重启宕机服务)
cat > ~/health_check.sh << 'EOF'
#!/bin/bash
if ! systemctl is-active --quiet moltbot; then
echo "$(date): moltbot is down, restarting..." >> /home/moltbot/restart.log
sudo systemctl restart moltbot
fi
EOF
chmod +x ~/health_check.sh
echo "*/5 * * * * /home/moltbot/health_check.sh" | crontab -
性能快照脚本(每小时记录)
cat > ~/monitor.sh << 'EOF'
#!/bin/bash
echo "=== CM0 Health Check ==="
echo "CPU Usage: $(top -bn1 | grep "Cpu(s)" | awk '{print $2}' | cut -d'%' -f1)%"
echo "Memory Usage: $(free -m | awk 'NR==2{printf "%.2f%%", $3*100/$2 }')"
echo "Disk Usage: $(df -h / | awk 'NR==2{print $5}')"
echo "Temperature: $(vcgencmd measure_temp | cut -d'=' -f2)"
echo "moltbot Status: $(systemctl is-active moltbot)"
echo "Uptime: $(uptime -p)"
EOF
chmod +x ~/monitor.sh
echo "0 * * * * /home/moltbot/monitor.sh >> /home/moltbot/health.log 2>&1" | crontab -
第十部分:总结 —— CM0的AI逆袭之路
| 成就 |
说明 |
| ✅ 512MB内存运行AI网关 |
通过Swap、Node.js内存限制、服务精简实现 |
| ✅ 单核CPU稳定多任务 |
systemd进程隔离 + max_concurrent=2 配置保障响应 |
| ✅ 飞书/Telegram/Discord多通道接入 |
moltbot抽象协议层屏蔽底层差异 |
| ✅ 硬件协同控制能力 |
自动生成Arduino项目,打通MCU与AI决策链路 |
CM0的OS独白:
“一开始:我只是个小小的计算模块…
现在:我是AI助手的载体!我骄傲!
未来:我要学会语音、视觉、IoT控制——成为家庭AI中枢。”
给后来者的硬核建议:
- 耐心是基础设施:CM0不是玩具,是需要调教的嵌入式伙伴
- 监控即运维:没有日志和指标,等于在黑暗中驾驶
- 备份即生命线:eMMC镜像定期导出,
dd if=/dev/sda of=cm0-backup.img
- 国产模型优先:Moonshot/Kimi、Qwen、GLM等API延迟低、成本可控、中文理解优
彩蛋:CM0的梦想清单 🌟
- [ ] 语音合成与识别(Picovoice + Whisper.cpp)
- [ ] 本地图像识别(ONNX Runtime + YOLOv8n)
- [ ] MQTT网关桥接(Home Assistant深度集成)
- [ ] TUI可视化控制面板(基于
blessed或tui-rs)
- [ ] 自主学习技能(通过
hooks自动保存对话到memory.md)
最后一句真心话:
这不是一篇“教程”,而是一份边缘AI落地的可行性报告。
当你在CM0上敲下 moltbot onboard,你启动的不仅是一个进程,更是微型设备智能化的第一行代码。
Happy Hacking! 🚀
相关资源推荐
 发表于 2026-1-31 22:11:23
|
查看: 290|
回复: 0
发表于 2026-1-31 22:11:23
|
查看: 290|
回复: 0
