你是否觉得PID控制遥不可及,很神秘?对其原理感到模糊,只知其然而不知其所以然?本文将从另一个视角切入,探究微分、积分电路的本质,旨在帮助你从根本上理解PID控制(比例、积分、微分)的核心思想。
在深入认识微分、积分电路之前,我们必须先了解一个关键元件:电容。教科书常说“电容的电流超前电压90°”,这到底是什么意思?其物理本质又是什么?
要彻底掌握微分、积分电路乃至PID的控制思路,首先必须吃透电容的工作原理。
电容的本质:电荷的容器
从微观角度看,电容就是一个储存电荷的容器。当电荷流入这个容器时,极板间的电场会随着时间逐渐增强。以图1的RC充电电路为例:
- 充电初始:电容电压
Uc = 0V,电源电压 Ui 全部加在电阻 R 上,即压差 ΔU = Ur = Ui。此时容器内没有电荷,也就没有电场排斥新流入的电荷,所以充电电流 Ic 最大,容抗最小,电容近似于短路。
- 充电中期:随着
Uc 上升,电阻上的压差 ΔU = Ui - Uc 开始减小。这个过程建立了电场,容器开始表现出对流入电荷的排斥力,电流 Ic 逐渐减小,容抗逐渐增大。
- 充电结束:当
Uc = Ui 时,压差 ΔU = Ur = 0V。此时容器内电场最强,以最大排斥力阻止电荷流入,电流 Ic = 0,容抗最大,电容近似于开路。
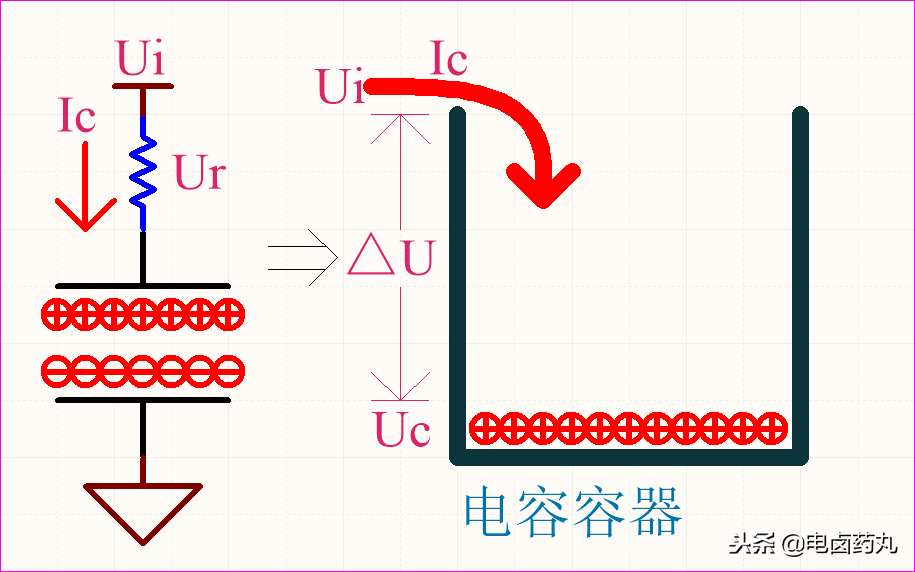
图1:电容充电过程模型
当电荷从容器中流出(放电)时,极板间的电场会随时间逐渐减弱。放电过程中的电容可以看作一个内阻为零的电压源。以图2为例(移除电源并将回路接地):
- 放电初始:
Uc = Ui,容器充满电荷,电场最强。由于电阻 R 不变,放电电流 Ic 最大(方向与充电相反),电阻两端电压 Ur = Uc = Ui。
- 放电中期:
Uc 下降,电场减弱,放电电流 Ic 随之减小,Ur = Uc 也逐渐减小。
- 放电结束:
Uc = 0V,容器内电荷耗尽,电场消失,Ur = 0V。
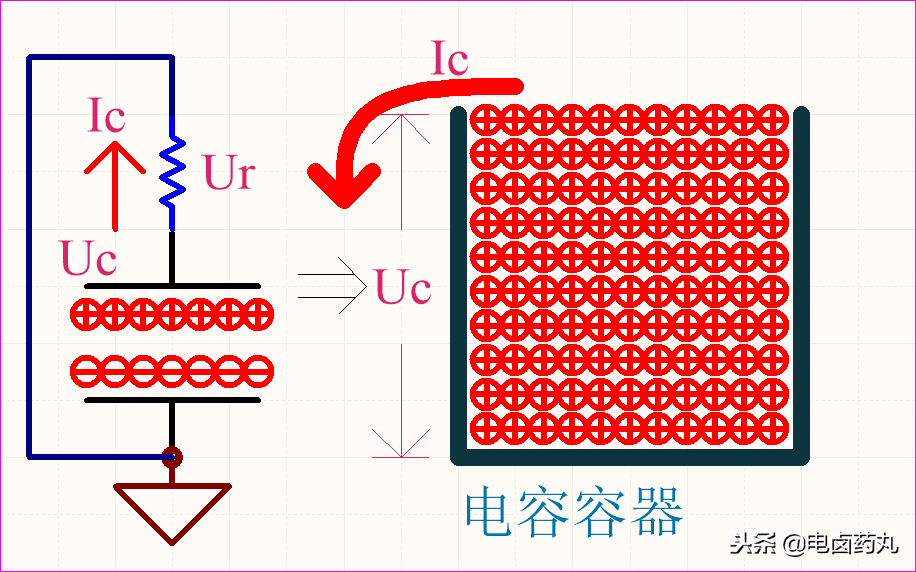
图2:电容放电过程模型(等效为电压源)
电容就像是一个水桶,无论流入的水流是大是小,水位总是从最低处开始连续上升的。电容中电荷的积累也是一个从零开始的连续过程,其积累规律与自然常数 e 相关。图3清晰地展示了电容充放电过程中电压与电流随时间变化的曲线关系。
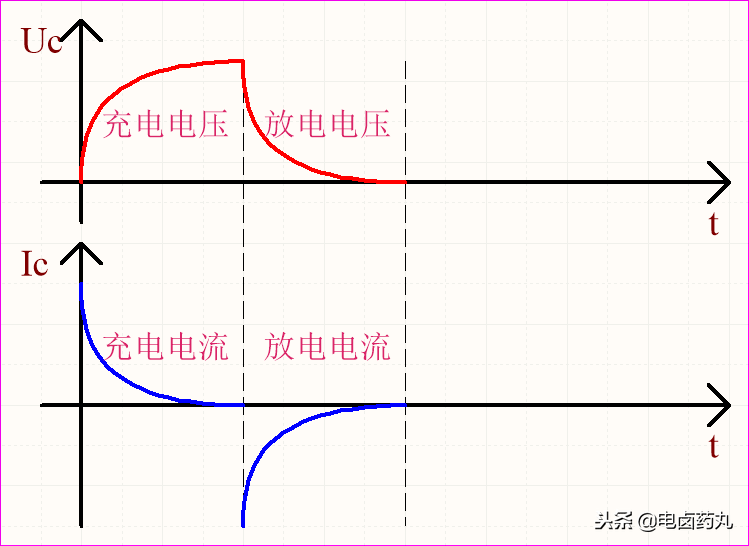
图3:电容充放电过程中的电压-电流曲线
结合以上分析,我们可以总结出电容的几个核心特性:
- 电容电压不能突变,但电流可以突变(教材公式表述为:电容电流与其两端电压的变化率成正比)。
- 充电时,电容可等效为一个阻值从极小变到极大的可变电阻;放电时,电容可等效为一个电压逐渐衰减的电压源。
- 电容电流反映了单位时间内流动的电荷量,而电容电压(或电场)反映了电荷总量的多少。通俗地讲,正是电荷的流动导致了电荷总量的变化(这与特性①吻合)。用数学语言描述,便是“电容的电流超前电压相位90°”。
- 电容充放电的速度取决于电容
C 和电阻 R 的大小(即时间常数 τ = RC)。
在对电容有了充分了解之后,我们先从最简单的电路开始。
从分压电路到比例(P)、积分(I)、微分(D)的雏形
图4是一个最简单的电阻分压电路,根据欧姆定律,VCC 点的电压为 2.5V。这个纯电阻网络,实际上是比例运算电路的雏形。
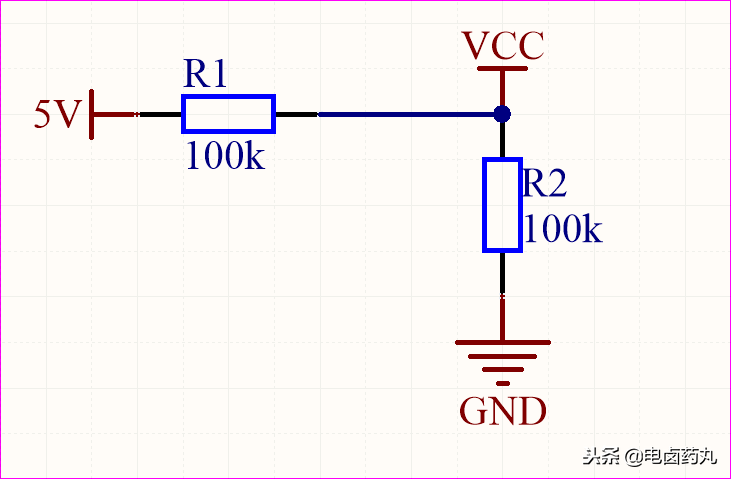
图4:电阻分压电路(比例P的雏形)
如图5,我们将图4中的 R2 替换为一个 0.1μF(104)的电容 C1。根据电容特性,C1 充满电后近似开路,此时 VCC = 5V。这个电路就是积分运算电路的雏形。若将 5V 直流电源换为信号源,它就构成了一个基本的RC低通滤波电路。
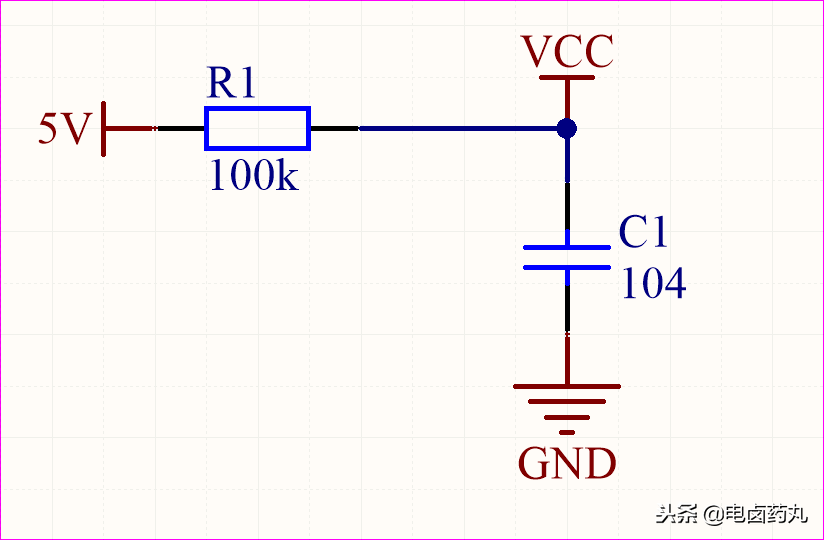
图5:RC积分电路(积分I的雏形)
图6展示了图5电路的充电波形。红色曲线代表 5V 电源(Ui)的波形,蓝色曲线代表 VCC 点的波形。由于电容充电时容抗由小变大直至开路,分压点 VCC 的电压也从 0V 开始缓慢上升,最终达到 5V。电容充电需要时间,导致 VCC 波形变化缓慢,这种波形常见于开关电源的软启动过程。
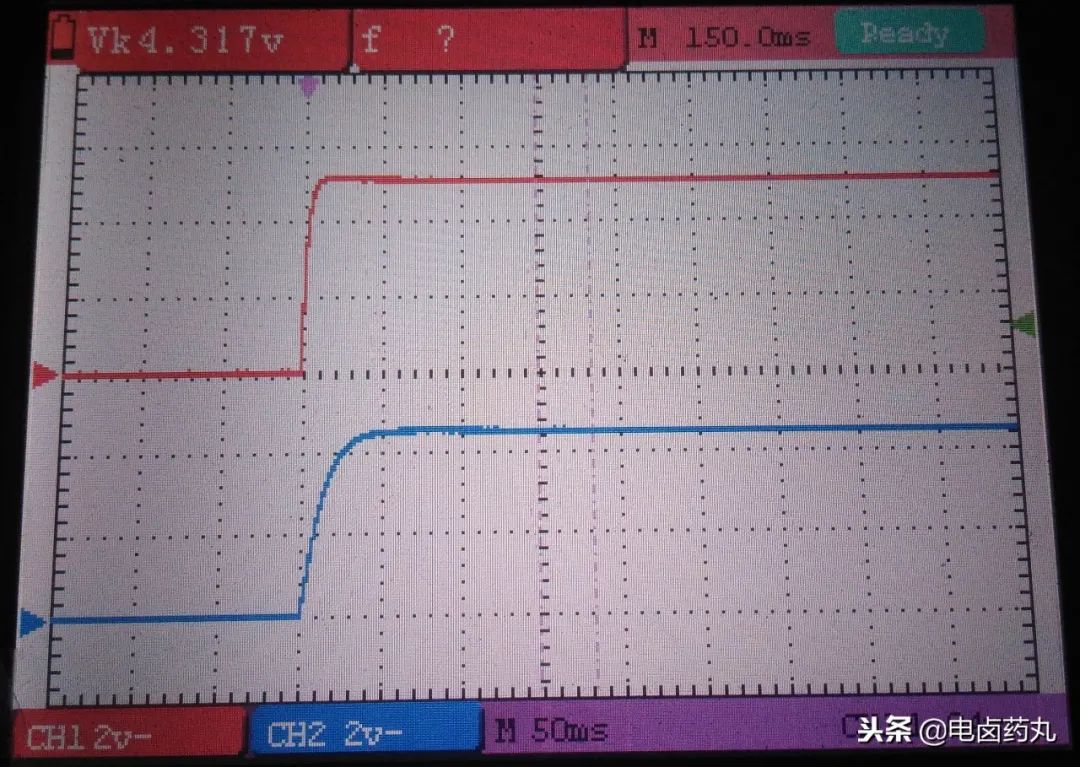
图6:积分电路充电波形
将图4的分压电路和图5的积分电路组合,就得到了图7的电路。这就是我们常用的 PI电路(比例-积分),在基准电压或分压电路中非常常见。加入电容 C1 的目的是引入延时,稳定 VCC 点的电压,使其不受 5V 输入端瞬时波动的影响,最终 VCC 仍稳定在 2.5V。
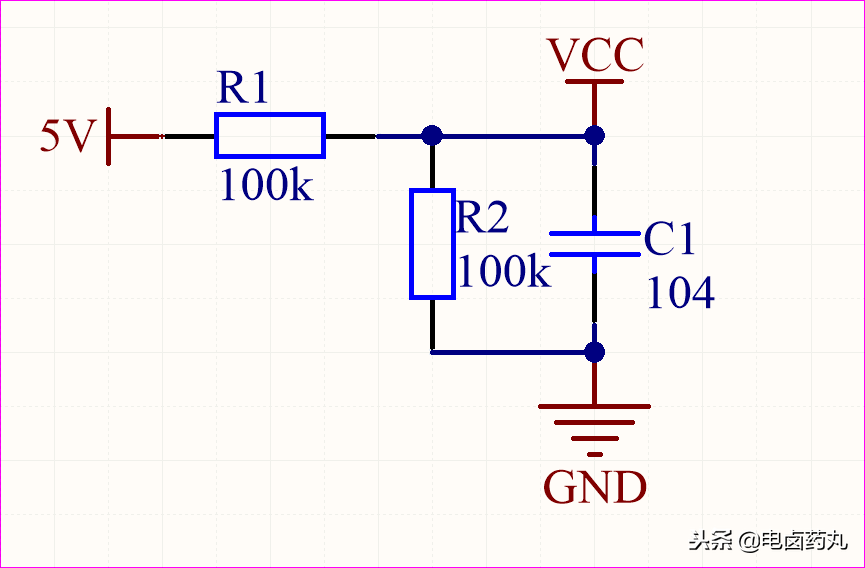
图7:PI电路(比例-积分)
将图5中电阻 R1 和电容 C1 的位置互换,得到图8的电路。C1 充满电后近似开路,此时 VCC = 0V。这个电路就是微分运算电路的雏形。若将 5V 直流电源换为信号源,它就构成了一个基本的RC高通滤波电路。
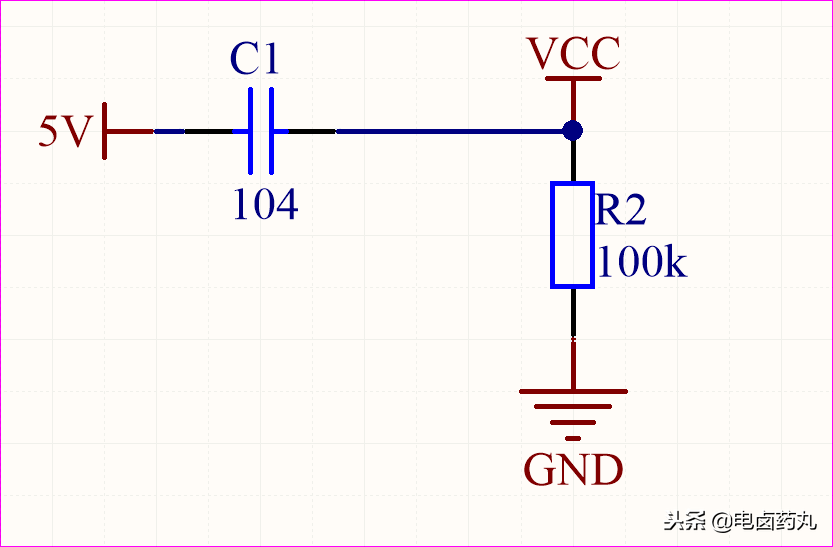
图8:RC微分电路(微分D的雏形)
图9是图8电路的充电波形。红色曲线为 5V 电源(Ui)波形,蓝色曲线为 VCC 点波形。由于电容充电瞬间容抗最小,Ui 从 0V 跳变到 5V 的瞬间,电压几乎全部加在电阻 R2 上,VCC 也瞬间跳变为 5V;随着电容充电,容抗变大,VCC 逐渐下降至 0V。可见,在输入跳变的瞬间,输出 (VCC) 即达到最大值,这体现了 微分“超前预判” 的特性,它反映的是输入信号的变化率。
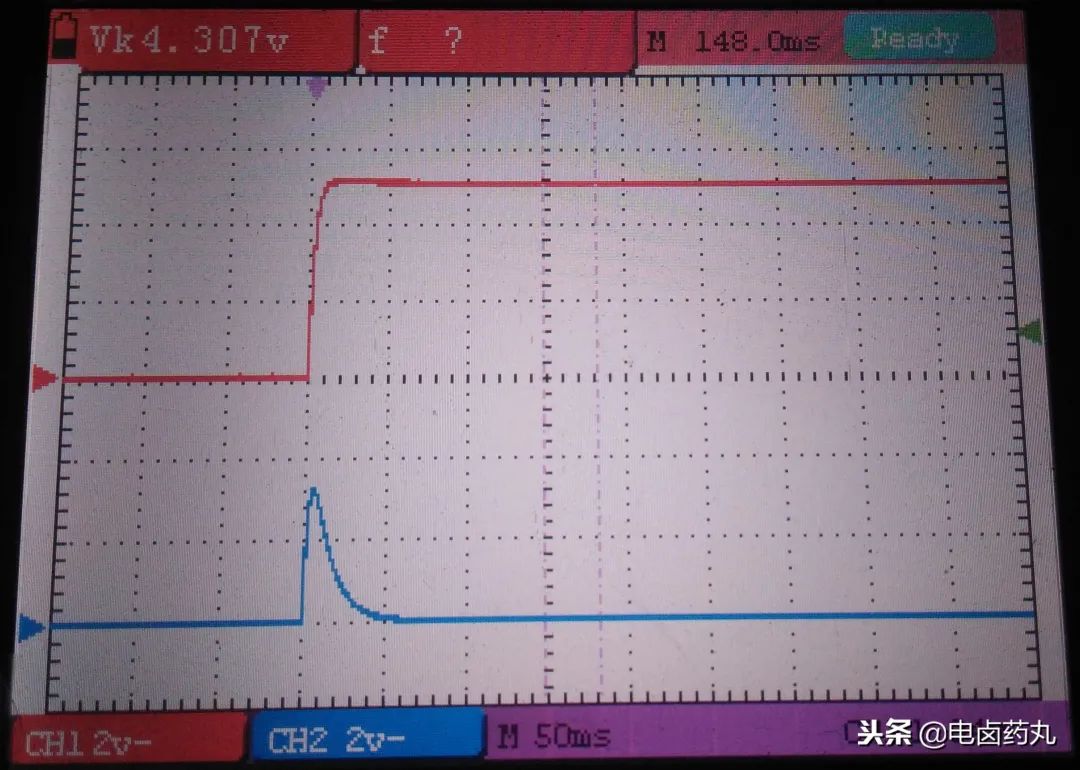
图9:微分电路充电波形
基于运算放大器的微分与积分电路
理解了RC网络的基础,我们再看由运算放大器构成的标准电路。图10是一个反相比例运算电路,其输出电压 Uo 与输入电压 Ui 成固定的比例(线性)关系。关于运放的深入讲解,可参考相关视频。
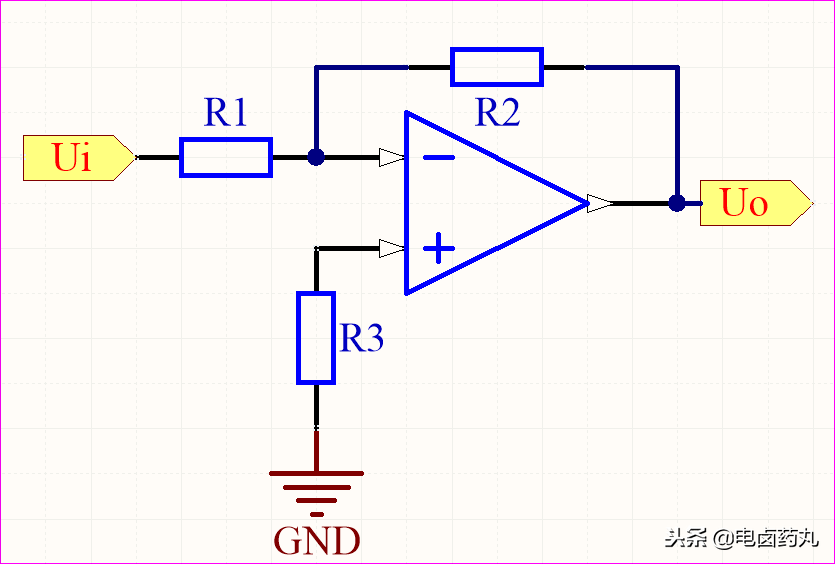
图10:反相比例运算电路
图11展示了比例运算电路的输入输出波形,Uo 与 Ui 相位相反,幅度成比例。
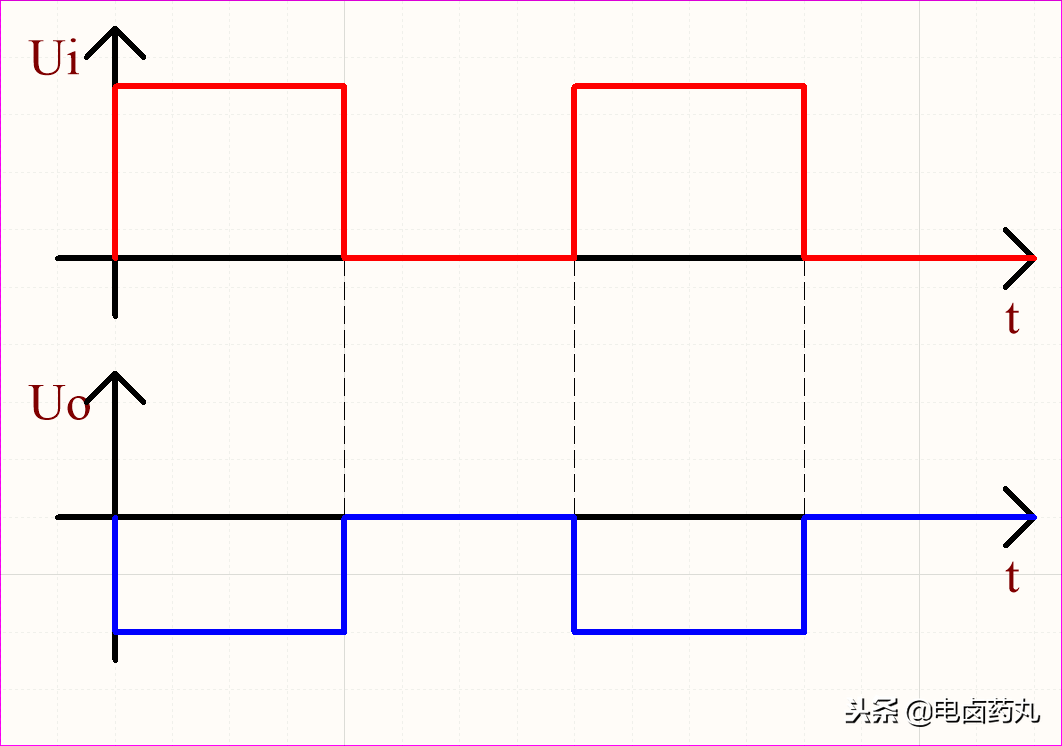
图11:比例运算电路波形
微分运算电路的工作过程
图12和图13展示了微分运算电路的充放电过程:
- 充电过程(图12):电容
C1 可等效为可变电阻。充电开始时 C1 容抗为0,其两端电压不能突变故为 0V。此时 Ui 全部加在 R1 上,运放反相输入端 (-) 获得正最大峰值电压,导致输出 Uo 为负的最大峰值。随着 C1 充电,其容抗增大,Uo 逐渐回归 0V。
- 放电过程(图13):电容
C1 可等效为电压源,且电压不能突变。此时放电电流反向最大,在 R1 上产生反向最大压降,运放反相输入端 (-) 获得负最大峰值电压,导致输出 Uo 为正的最大峰值。随着 C1 放电,Uo 逐渐回归 0V。
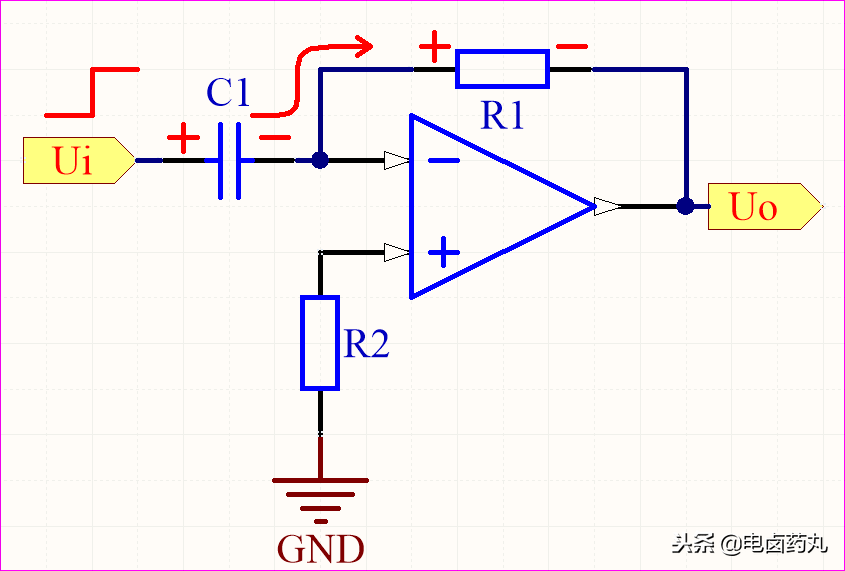
图12:微分运算电路充电过程分析
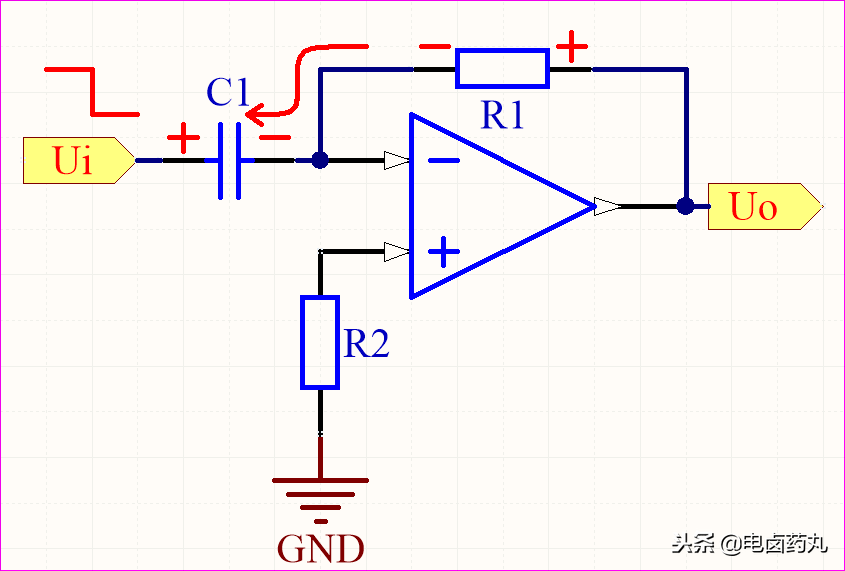
图13:微分运算电路放电过程分析
图14为理想微分运算电路的输入输出波形。结合上述分析可知,输出 Uo 的尖峰脉冲正好对应输入 Ui 的跳变沿,它反映了 Ui 的变化率,实现了“超前预判”的效果。
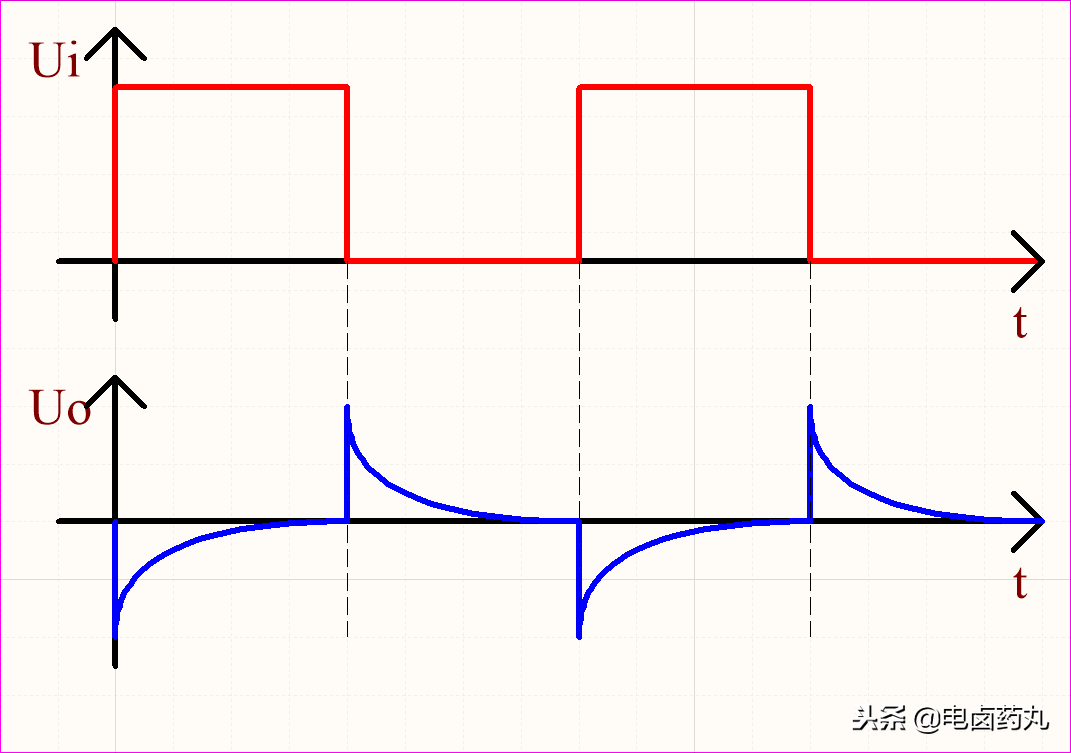
图14:微分运算电路波形
实际微分电路设计
图15是一个更接近实际的微分运算仿真电路。为了防止运放在高频时饱和并抑制噪声,必须在电容 C1 输入端串联一个小电阻 R2。加入 R2 后,电路已不是理想微分电路,但只要输入信号周期大于 2πR1C1,仍可近似实现微分运算。
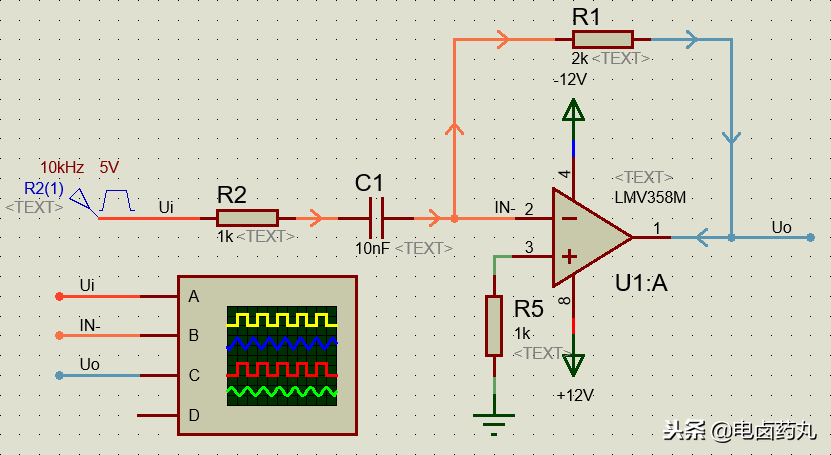
图15:实用微分运算仿真电路(输入端串联电阻R2)
图16是该仿真电路的波形,其中 IN- 是运放反相输入端的波形。
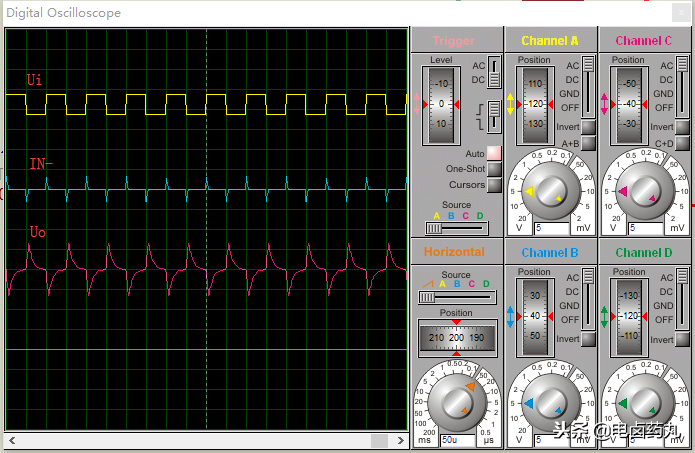
图16:实用微分运算仿真电路波形
积分运算电路的工作过程
图17和图18展示了积分运算电路的充放电过程:
- 充电过程(图17):电容
C1 可等效为可变电阻。充电开始时容抗为0,其两端电压为 0V,运放反相输入端 (-) 为“虚地”,故输出 Uo 为 0V。随着 C1 被恒定电流(由 Ui/R1 决定)充电,其两端电压线性上升,导致输出 Uo 向负方向线性增长(对于反相积分器),直至达到运放负向饱和值。
- 放电过程(图18):电容
C1 可等效为电压源。当输入 Ui 变为0或反向时,C1 通过 R1 和运放放电,其储存的电荷量(电压)逐渐减小,输出 Uo 也从负峰值逐渐回归 0V。
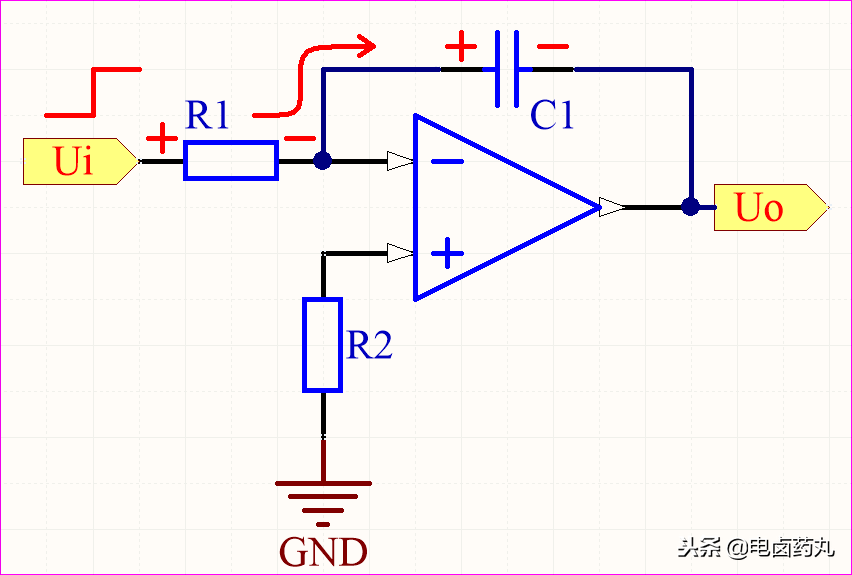
图17:积分运算电路充电过程分析
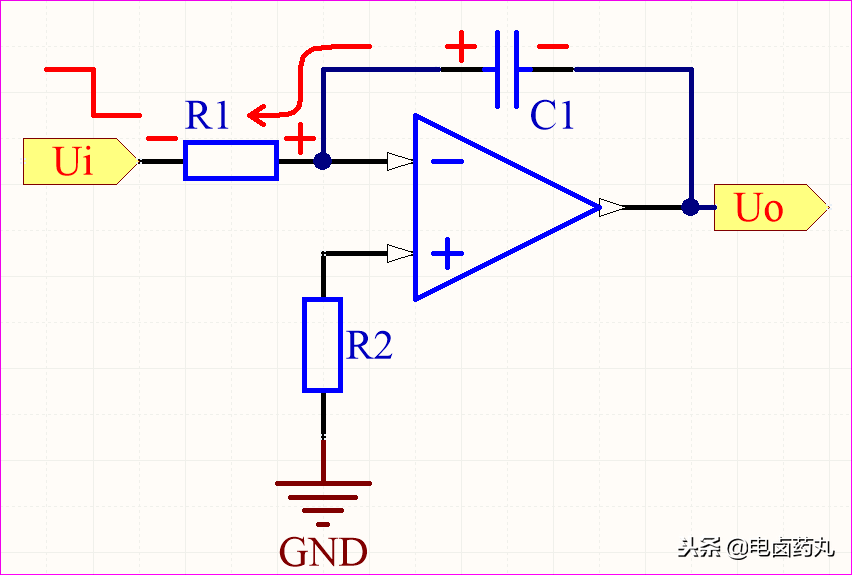
图18:积分运算电路放电过程分析
图19为理想积分运算电路的输入输出波形。输出 Uo 是输入 Ui 的随时间积累(积分)的结果,输入为方波时,输出为三角波,这体现了积分 “延迟稳定” 的效果,能够平滑输入的变化。
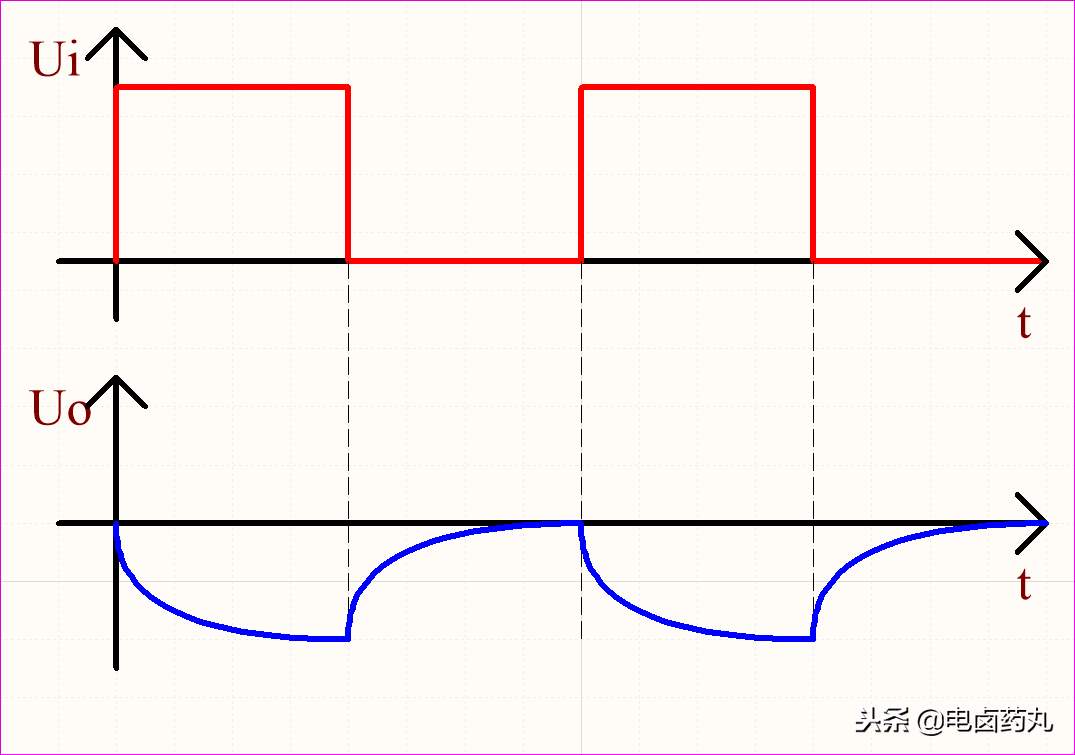
图19:积分运算电路波形
实际积分电路设计
图20是一个更接近实际的积分运算仿真电路。为了防止运放输入失调电压等导致积分结果漂移饱和,通常需要在积分电容 C2 两端并联一个较大的电阻 R3。加入 R3 后,电路已不是理想积分电路,但只要输入信号周期远小于 R3C2,仍可近似实现积分运算。
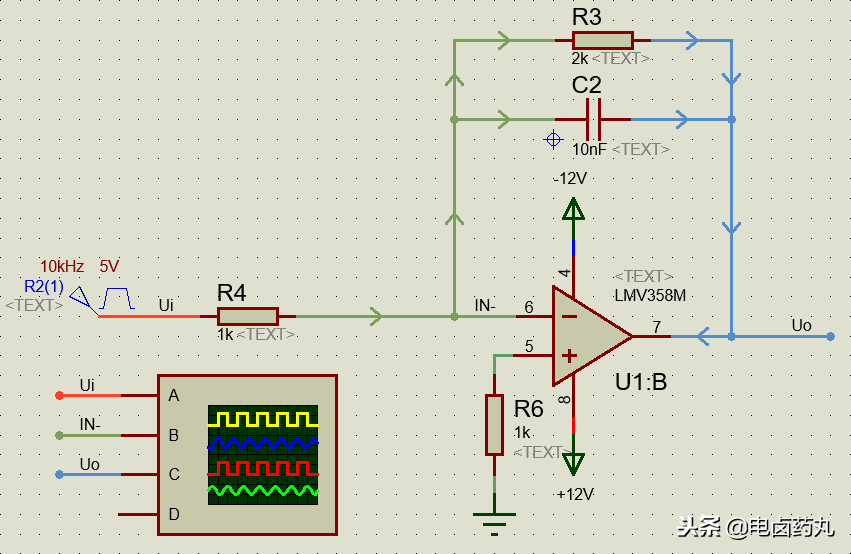
图20:实用积分运算仿真电路(电容并联电阻R3)
图21是该仿真电路的波形,其中 IN- 是运放反相输入端的波形。
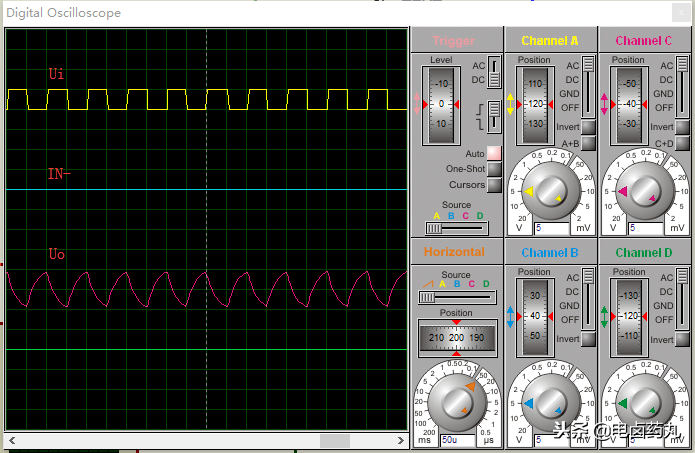
图21:实用积分运算仿真电路波形
核心要点总结
- 本质:微分与积分运算电路都巧妙地利用了 电容电压不能突变 这一核心特性,通过对输入信号变化率或历史值的响应来调节输出。它们只对变化的输入信号有意义。
- 特性对比:
- 微分 (D) 控制 具有 超前预判 的特性,能快速响应系统的变化趋势。
- 积分 (I) 控制 具有 延迟稳定 的特性,能消除系统的稳态误差。
- 在PID调节的动态响应速度上:微分 (D) > 比例 (P) > 积分 (I)。
希望本文通过从电容本质到电路雏形,再到运放实现的层层剖析,能帮助你拨开微积分在电路中的应用迷雾,并建立起与PID控制原理的直观联系。理解这些基础模拟电路,是深入掌握自动控制理论的重要一步。如果你想就运放或其他模拟电路话题进行更深入的探讨,欢迎来云栈社区交流分享。
 发表于 2026-2-2 04:41:57
|
查看: 190|
回复: 0
发表于 2026-2-2 04:41:57
|
查看: 190|
回复: 0
