1. RTC概述:系统的“电子手表”
在Linux系统中,实时时钟(Real-Time Clock, RTC)扮演着“系统电子手表”的角色。它具备以下核心特征:
- 独立供电:通过纽扣电池供电,在系统关机后仍能持续计时。
- 时间基准:为系统提供初始的时间基准,在启动时读取RTC时间以初始化系统时间。
- 低精度特性:通常精度在秒到毫秒级别,用于基础时间跟踪。
RTC的作用类似于传统的手表或座钟,为系统提供了一个持久的时间参考点。而Linux内核的时间子系统则像是一个高精度的秒表,在RTC提供的基础时间之上,通过其他时钟源(如TSC、HPET)实现纳秒级的高精度计时。在x86架构中,RTC通常集成在芯片组中,与CMOS RAM共用一块纽扣电池供电。
2. 工作原理:硬件与软件的协同
2.1 硬件基础
RTC硬件通常由以下核心组件构成:
| 组件 |
功能描述 |
技术指标 |
| 32.768kHz晶振 |
提供稳定的时间基准频率 |
频率精度通常为±20ppm |
| 时钟计数器 |
对晶振脉冲进行计数,并转换为时间值(秒、分、时、日、月、年) |
支持BCD码或二进制格式 |
| 备份电池 |
在主系统断电时维持RTC电路的运行 |
常见为CR2032纽扣电池,寿命3-10年 |
2.2 软件框架
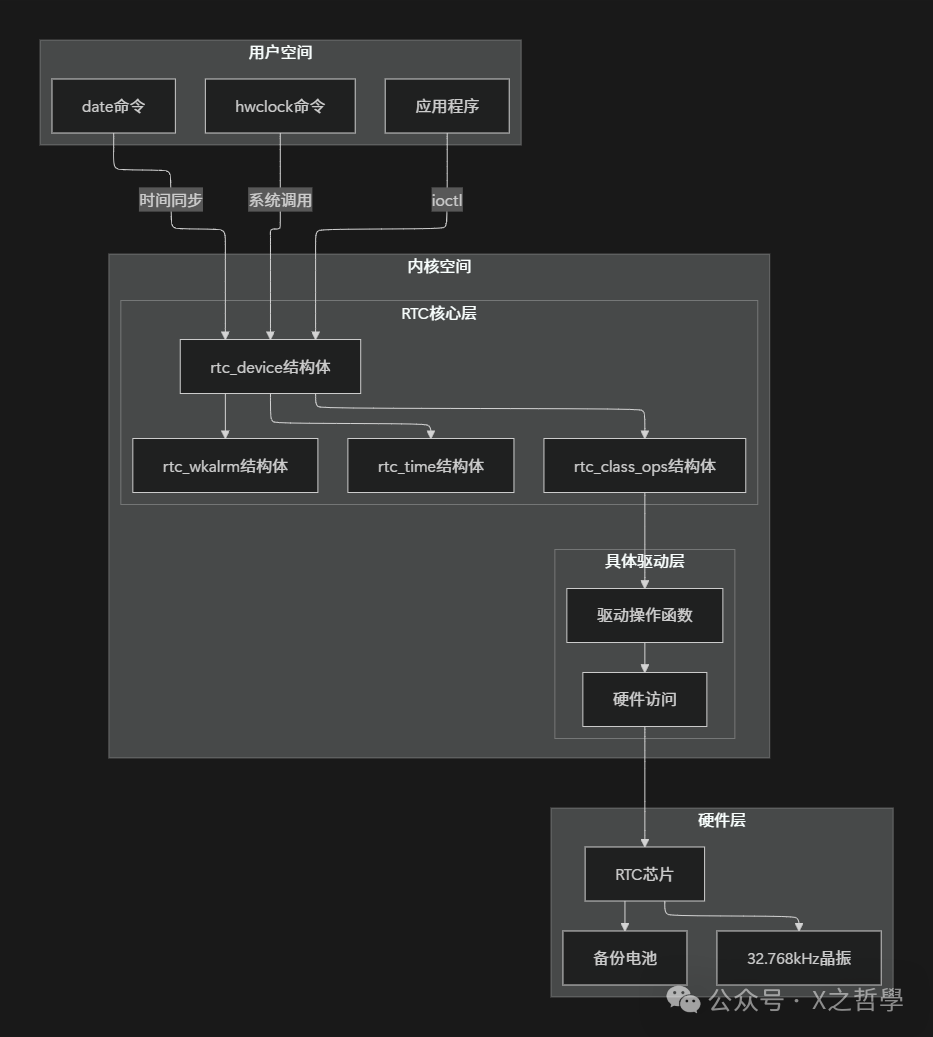
为了屏蔽不同RTC硬件的差异,Linux内核通过RTC子系统提供了统一的软件抽象层,其层次结构如下:
用户空间应用程序
↓
字符设备接口 (/dev/rtc0, /dev/rtc1...)
↓
RTC核心层 (drivers/rtc/rtc-dev.c, rtc-sysfs.c)
↓
RTC Class设备层 (drivers/rtc/rtc-class.c)
↓
具体RTC芯片驱动 (如 drivers/rtc/rtc-ds1307.c)
↓
硬件RTC芯片 (如 DS1307, RX8010)
深入理解这些硬件细节对于进行Linux系统编程和底层开发至关重要。
3. 核心数据结构与关系
3.1 rtc_device:RTC设备的核心描述
struct rtc_device 是内核中描述一个RTC设备的顶级结构体。
struct rtc_device {
struct device dev; // 设备模型基础结构
struct module *owner; // 模块所有者
int id; // 设备ID(对应次设备号)
char name[RTC_DEVICE_NAME_SIZE]; // 设备名称
const struct rtc_class_ops *ops; // 指向硬件操作函数集的指针
struct mutex ops_lock; // 串行化操作函数的锁
struct cdev char_dev; // 关联的字符设备结构
unsigned long flags; // 设备状态标志
unsigned long irq_data; // 中断相关数据
spinlock_t irq_lock; // 保护中断数据的自旋锁
wait_queue_head_t irq_queue; // 等待中断的进程队列
struct fasync_struct *async_queue; // 异步通知队列
// ... 其他字段
};
3.2 rtc_class_ops:硬件操作接口
驱动开发者需要实现这个结构体中定义的回调函数,它是驱动与RTC核心层之间的契约。
struct rtc_class_ops {
int (*open)(struct device *); // 打开设备(可选)
void (*release)(struct device *); // 关闭设备(可选)
int (*ioctl)(struct device *, unsigned int, unsigned long); // 设备特定ioctl
int (*read_time)(struct device *, struct rtc_time *); // 读取时间(必须)
int (*set_time)(struct device *, struct rtc_time *); // 设置时间(必须)
int (*read_alarm)(struct device *, struct rtc_wkalrm *); // 读取闹钟设置
int (*set_alarm)(struct device *, struct rtc_wkalrm *); // 设置闹钟
int (*alarm_irq_enable)(struct device *, unsigned int); // 使能/禁用闹钟中断
// ... 更多可选操作
};
3.3 时间与闹钟结构
// 表示一个时刻
struct rtc_time {
int tm_sec; // 秒 [0-59]
int tm_min; // 分 [0-59]
int tm_hour; // 时 [0-23]
int tm_mday; // 日 [1-31]
int tm_mon; // 月 [0-11], 0代表一月
int tm_year; // 年份(从1900年起的偏移量)
int tm_wday; // 星期几 [0-6], 0代表周日
int tm_yday; // 一年中的第几天 [0-365]
int tm_isdst; // 夏令时标志
};
// 表示一个闹钟设置
struct rtc_wkalrm {
unsigned char enabled; // 闹钟使能状态:0=禁用,1=启用
unsigned char pending; // 是否有未处理的闹钟中断:0=无,1=有
struct rtc_time time; // 闹钟触发的时间
};
3.4 数据结构关系图
4. RTC子系统框架深度解析
4.1 子系统初始化流程
RTC子系统在内核启动早期通过 subsys_initcall 级别的 rtc_init() 函数进行初始化。
static int __init rtc_init(void)
{
// 1. 创建RTC类 (/sys/class/rtc)
rtc_class = class_create(THIS_MODULE, "rtc");
if (IS_ERR(rtc_class)) {
pr_err("%s: couldn‘t create class\n", __FILE__);
return PTR_ERR(rtc_class);
}
// 2. 关联电源管理回调
rtc_class->suspend = rtc_suspend;
rtc_class->resume = rtc_resume;
// 3. 初始化字符设备层
rtc_dev_init();
// 4. 初始化sysfs属性文件
rtc_sysfs_init(rtc_class);
return 0;
}
4.2 字符设备操作集
RTC设备作为字符设备(如 /dev/rtc0)向用户空间提供服务,其文件操作定义如下:
static const struct file_operations rtc_dev_fops = {
.owner = THIS_MODULE,
.llseek = no_llseek,
.read = rtc_dev_read, // 读取当前时间或等待闹钟
.poll = rtc_dev_poll, // 轮询闹钟中断
.unlocked_ioctl = rtc_dev_ioctl, // 处理RTC_RD_TIME等命令
.open = rtc_dev_open,
.release = rtc_dev_release,
.fasync = rtc_dev_fasync, // 支持异步通知(SIGIO)
};
4.3 设备注册流程
驱动通过 rtc_device_register() 或 devm_rtc_device_register() 向核心层注册一个RTC设备。
struct rtc_device *rtc_device_register(const char *name,
struct device *dev,
const struct rtc_class_ops *ops,
struct module *owner);
注册成功后,内核会自动在 /dev 目录下创建对应的设备节点(如 /dev/rtc0),并在 /sys/class/rtc/ 下创建包含 time、date、since_epoch 等属性的sysfs接口。这一过程清晰地展示了Linux内核模块的加载与设备管理机制。
4.4 RTC在时间子系统中的位置
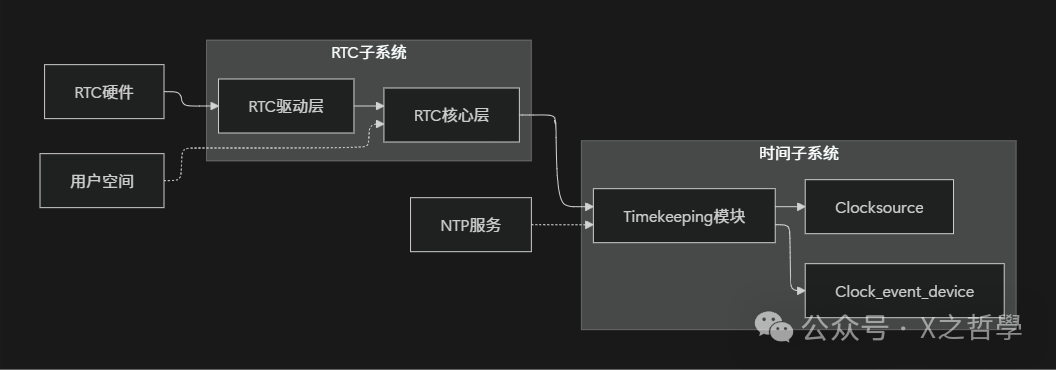
RTC在系统启动阶段为 timekeeping 模块提供初始的墙上时间(wall time)。随后,timekeeping 模块主要依赖高精度的 clocksource(如TSC)进行计时,并使用 clock_event_device 处理定时事件。RTC则退居二线,主要负责持久化保存时间以及在系统休眠时作为唤醒源。
5. 实践示例:最简单的RTC应用
5.1 读取RTC时间
#include <stdio.h>
#include <stdlib.h>
#include <linux/rtc.h>
#include <sys/ioctl.h>
#include <fcntl.h>
#include <unistd.h>
int main(void)
{
int fd, ret;
struct rtc_time rtc_tm;
// 打开RTC设备
fd = open("/dev/rtc0", O_RDONLY);
if (fd < 0) {
perror("open /dev/rtc0");
return 1;
}
// 使用ioctl命令读取RTC硬件时间
ret = ioctl(fd, RTC_RD_TIME, &rtc_tm);
if (ret < 0) {
perror("ioctl RTC_RD_TIME");
close(fd);
return 1;
}
printf("RTC时间: %04d-%02d-%02d %02d:%02d:%02d\n",
rtc_tm.tm_year + 1900, rtc_tm.tm_mon + 1, rtc_tm.tm_mday,
rtc_tm.tm_hour, rtc_tm.tm_min, rtc_tm.tm_sec);
close(fd);
return 0;
}
5.2 设置RTC时间
int set_rtc_time(int year, int month, int day,
int hour, int min, int sec)
{
int fd, ret;
struct rtc_time rtc_tm;
fd = open("/dev/rtc0", O_WRONLY);
if (fd < 0) {
perror("open /dev/rtc0");
return -1;
}
// 填充时间结构体,注意内核表示的格式
rtc_tm.tm_year = year - 1900; // 年份偏移量
rtc_tm.tm_mon = month - 1; // 月份范围0-11
rtc_tm.tm_mday = day;
rtc_tm.tm_hour = hour;
rtc_tm.tm_min = min;
rtc_tm.tm_sec = sec;
rtc_tm.tm_wday = -1; // 驱动或内核会自动计算
rtc_tm.tm_yday = -1;
rtc_tm.tm_isdst = -1; // 通常忽略夏令时
// 设置RTC硬件时间
ret = ioctl(fd, RTC_SET_TIME, &rtc_tm);
if (ret < 0) {
perror("ioctl RTC_SET_TIME");
close(fd);
return -1;
}
printf("RTC时间设置成功\n");
close(fd);
return 0;
}
5.3 完整的测试程序
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <linux/rtc.h>
#include <sys/ioctl.h>
#include <fcntl.h>
#include <unistd.h>
#include <time.h>
// 读取并显示RTC时间
void read_and_display_rtc(int fd)
{
struct rtc_time rtc_tm;
if (ioctl(fd, RTC_RD_TIME, &rtc_tm) == 0) {
printf("当前RTC时间: %04d-%02d-%02d %02d:%02d:%02d\n",
rtc_tm.tm_year + 1900, rtc_tm.tm_mon + 1, rtc_tm.tm_mday,
rtc_tm.tm_hour, rtc_tm.tm_min, rtc_tm.tm_sec);
} else {
perror("读取RTC时间失败");
}
}
// 设置闹钟
int set_alarm(int fd, int hour, int min, int sec)
{
struct rtc_wkalrm alarm;
memset(&alarm, 0, sizeof(alarm));
alarm.time.tm_hour = hour;
alarm.time.tm_min = min;
alarm.time.tm_sec = sec;
alarm.enabled = 1;
if (ioctl(fd, RTC_ALM_SET, &alarm) < 0) {
perror("设置闹钟失败");
return -1;
}
// 使能闹钟中断
if (ioctl(fd, RTC_AIE_ON, 0) < 0) {
perror("使能闹钟中断失败");
return -1;
}
printf("闹钟已设置为: %02d:%02d:%02d\n", hour, min, sec);
return 0;
}
int main(int argc, char *argv[])
{
int fd;
struct rtc_wkalrm alarm;
// 打开RTC设备
fd = open("/dev/rtc0", O_RDWR);
if (fd < 0) {
// 尝试回退到通用设备节点
fd = open("/dev/rtc", O_RDWR);
if (fd < 0) {
perror("无法打开RTC设备");
return 1;
}
}
printf("=== RTC测试程序 ===\n");
// 1. 读取当前RTC时间
read_and_display_rtc(fd);
// 2. 设置闹钟(示例:1分钟后触发)
time_t now = time(NULL);
struct tm *tm_now = localtime(&now);
set_alarm(fd, tm_now->tm_hour, tm_now->tm_min + 1, tm_now->tm_sec);
// 3. 读取并显示已设置的闹钟时间
printf("等待闹钟触发...\n");
if (ioctl(fd, RTC_ALM_READ, &alarm) == 0) {
printf("闹钟设置时间: %02d:%02d:%02d\n",
alarm.time.tm_hour, alarm.time.tm_min, alarm.time.tm_sec);
}
// 4. 等待一段时间后再次读取RTC时间
sleep(70); // 等待70秒
read_and_display_rtc(fd);
// 5. 关闭闹钟中断
ioctl(fd, RTC_AIE_OFF, 0);
close(fd);
printf("测试完成\n");
return 0;
}
6. 驱动开发实例:DS1302 RTC驱动
6.1 驱动框架
以下是一个基于平台设备模型的DS1302驱动简化框架:
#include <linux/module.h>
#include <linux/init.h>
#include <linux/platform_device.h>
#include <linux/rtc.h>
#include <linux/delay.h>
// DS1302硬件操作函数
static int ds1302_read_time(struct device *dev, struct rtc_time *tm)
{
// 通过GPIO模拟SPI协议,读取DS1302的秒、分、时、日、月、年等寄存器
// 具体实现依赖于硬件连接(CE、I/O、SCLK引脚)
// 将读取到的BCD码转换为二进制,填充到tm结构体
return 0;
}
static int ds1302_set_time(struct device *dev, struct rtc_time *tm)
{
// 将tm结构体中的时间转换为BCD码
// 通过GPIO模拟SPI协议,写入DS1302的相应寄存器
return 0;
}
// 定义驱动提供给RTC核心层的操作函数集
static const struct rtc_class_ops ds1302_rtc_ops = {
.read_time = ds1302_read_time,
.set_time = ds1302_set_time,
// 可根据需要实现 .read_alarm, .set_alarm 等
};
// 平台驱动probe函数
static int ds1302_rtc_probe(struct platform_device *pdev)
{
struct rtc_device *rtc;
// 1. 初始化硬件:申请GPIO、设置引脚方向等
// platform_get_resource() 获取设备树或板级数据中定义的GPIO号
// 2. 向RTC核心层注册设备
rtc = rtc_device_register("ds1302", &pdev->dev,
&ds1302_rtc_ops, THIS_MODULE);
if (IS_ERR(rtc)) {
dev_err(&pdev->dev, "无法注册RTC设备\n");
return PTR_ERR(rtc);
}
// 3. 将rtc_device指针保存到平台设备私有数据中
platform_set_drvdata(pdev, rtc);
dev_info(&pdev->dev, "DS1302 RTC驱动加载成功\n");
return 0;
}
// 平台驱动remove函数
static int ds1302_rtc_remove(struct platform_device *pdev)
{
struct rtc_device *rtc = platform_get_drvdata(pdev);
rtc_device_unregister(rtc);
// 释放GPIO等资源
dev_info(&pdev->dev, "DS1302 RTC驱动卸载成功\n");
return 0;
}
// 使用模块平台驱动宏简化代码(现代驱动写法)
module_platform_driver(ds1302_driver);
6.2 驱动加载与测试
# 1. 编译驱动(假设Makefile已配置好)
make
# 2. 加载驱动模块
sudo insmod ds1302_rtc.ko
# 3. 查看生成的设备节点
ls -l /dev/rtc*
# 4. 使用hwclock工具测试新驱动
sudo hwclock -r -f /dev/rtc1 # 如果新驱动注册为rtc1
# 5. 查看内核日志,确认驱动加载和探测过程
dmesg | tail -20
7. 工具命令与调试手段
7.1 常用命令汇总
| 命令 |
功能描述 |
示例用法 |
hwclock |
RTC时间管理的主要工具 |
hwclock -r 读取RTC时间
hwclock -w 将系统时间写入RTC
hwclock -s 将RTC时间同步到系统 |
date |
管理系统时间 |
date 显示当前系统时间
date -s "2025-12-04 10:30:00" 设置系统时间 |
cat /proc/driver/rtc |
查看RTC详细信息 |
显示当前RTC时间、日期、闹钟设置及中断状态。 |
dmesg | grep rtc |
查看RTC相关内核日志 |
过滤出内核启动和运行过程中所有RTC子系统的日志。 |
| *`ls /dev/rtc`** |
查看RTC设备节点 |
列出系统中所有已注册的RTC字符设备。 |
cat /sys/class/rtc/rtc0/date |
通过sysfs读取日期 |
以YYYY-MM-DD格式输出日期。 |
cat /sys/class/rtc/rtc0/time |
通过sysfs读取时间 |
以HH:MM:SS格式输出时间。 |
7.2 调试技巧与实践
7.2.1 基础调试流程
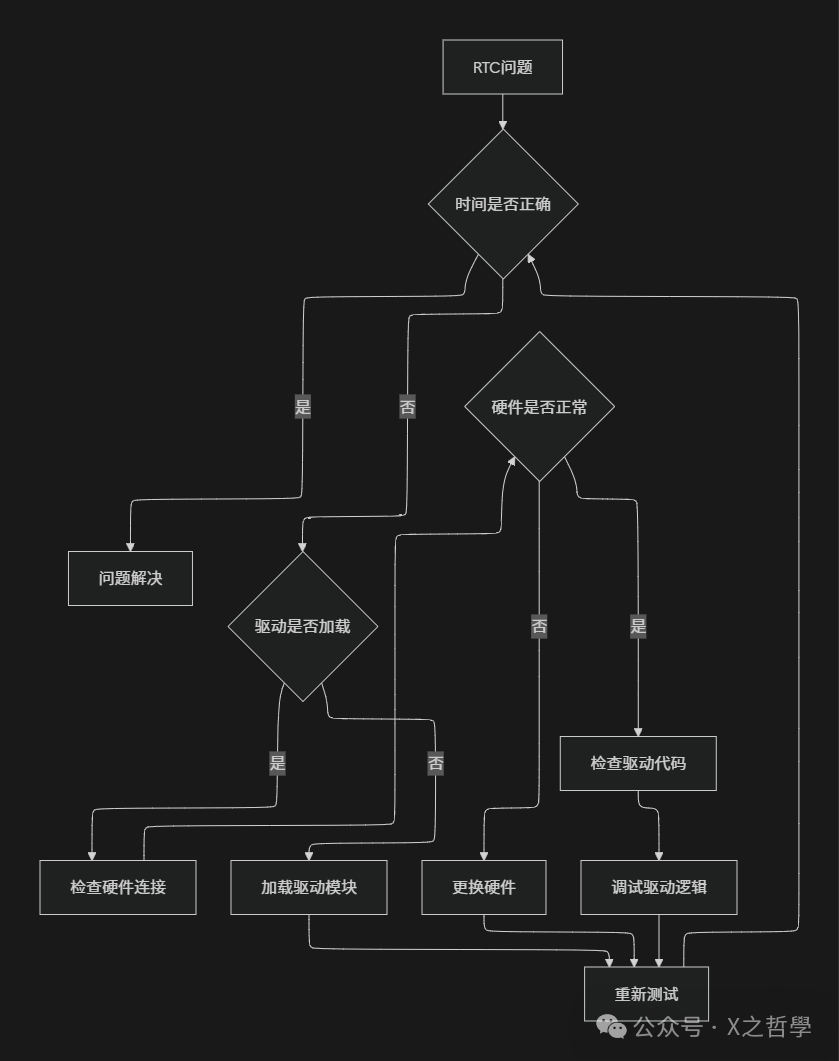
7.2.2 具体调试命令
# 1. 确认RTC设备节点存在
ls -l /dev/rtc*
# 正常输出示例: crw-rw---- 1 root root 253, 0 Dec 4 10:30 /dev/rtc0
# 2. 确认驱动模块已加载
lsmod | grep rtc
# 或查看内核日志
dmesg | grep -i rtc | head -5
# 3. 读取/proc接口获取详细信息
cat /proc/driver/rtc
# 输出示例:
# rtc_time : 10:30:00
# rtc_date : 2025-12-04
# alrm_time : 06:00:00
# alrm_date : 2025-12-05
# alarm_IRQ : no
# alrm_pending : no
# ...
# 4. 对比系统时间与RTC时间
date
hwclock -r --verbose # --verbose 显示更多细节
# 5. 时间同步操作
# 将当前准确的系统时间写入RTC
sudo hwclock -w
# 将RTC时间读回系统(慎用,如果RTC不准会覆盖正确时间)
sudo hwclock -s
7.2.3 常见问题排查
| 问题现象 |
可能原因 |
解决方法 |
hwclock: cannot access /dev/rtc0: No such file or directory |
RTC驱动未加载或设备未成功注册。 |
检查内核配置是否包含RTC支持,使用 modprobe rtc-xxx 加载对应驱动。 |
| RTC时间在断电后重置为初始值(如1970年) |
备份电池耗尽或接触不良。 |
更换主板的纽扣电池(通常是CR2032)。 |
| 时间走时明显不准(一天差数秒以上) |
32.768kHz晶振精度偏差过大或损坏。 |
软件校准(如果驱动支持)或更换晶振。 |
| 设置的闹钟不触发 |
驱动中未实现或未正确使能闹钟中断;硬件闹钟功能故障。 |
检查驱动代码的 alarm_irq_enable 操作;使用 cat /proc/driver/rtc 查看闹钟状态。 |
| 时间设置后立即恢复原值 |
RTC芯片的写保护引脚被拉高使能。 |
检查硬件电路,确保写保护引脚(如WP、RST)处于正确电平。 |
7.2.4 高级调试技巧
# 1. 使用strace跟踪工具的系统调用
strace hwclock -r 2>&1 | grep -i -A2 -B2 \"rtc\|ioctl\"
# 2. 启用内核驱动的动态调试(dyndbg)
# 假设驱动模块名为 rtc_ds1302
echo -n 'module rtc_ds1302 +p' > /sys/kernel/debug/dynamic_debug/control
# 然后再次操作,查看内核日志(dmesg)中该驱动的详细打印信息
# 3. 利用sysfs调试接口(如果驱动提供了)
# 某些调试版驱动会暴露寄存器读取接口
cat /sys/class/rtc/rtc0/registers 2>/dev/null
# 4. 检查电源管理状态对RTC的影响
cat /sys/power/state
# 确保在休眠(mem/standby)状态下,RTC的供电依然正常。
# 5. 对于I2C/SPI接口的RTC,使用总线工具直接访问
# I2C示例(假设RTC地址为0x68,在I2C总线1上)
sudo i2cdetect -y 1 # 扫描总线1上的设备
sudo i2cdump -y 1 0x68 # 以字节形式dump所有寄存器
sudo i2cget -y 1 0x68 0x00 # 读取地址0x00的寄存器(秒寄存器)
8. 核心模型与框架深度剖析
8.1 RTC子系统框架图
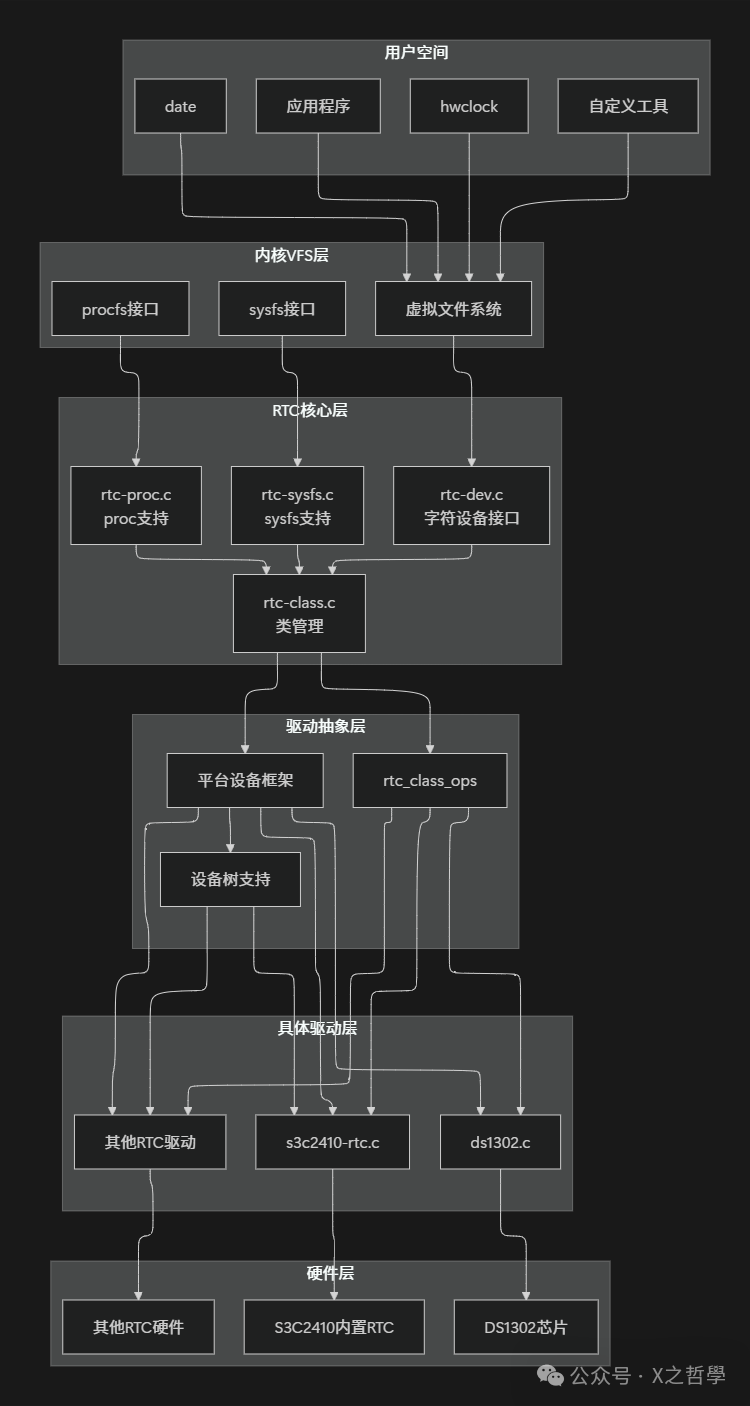
8.2 关键模块功能解析
8.2.1 rtc-dev.c:字符设备接口
这是用户空间通过 /dev/rtcX 设备文件访问RTC的主要通道。它将 read, ioctl, poll 等系统调用转化为对底层 rtc_class_ops 中具体函数的调用,并处理数据在用户空间和内核空间之间的拷贝与转换。
8.2.2 rtc-class.c:类管理
管理RTC设备类 (/sys/class/rtc),提供 rtc_device_register/unregister 等核心API。它负责维护全局RTC设备列表,分配设备号,并关联sysfs属性组。
8.2.3 rtc-sysfs.c:sysfs接口
为每个RTC设备在 /sys/class/rtc/rtc0/ 目录下创建一组属性文件(如 time, date, max_user_freq, hctosys等),允许用户通过简单的文件读写操作来查询或控制RTC,无需编写ioctl程序。
8.2.4 rtc-core.c:核心功能
包含一些共享的辅助函数,例如时间转换函数 (rtc_tm_to_time64, rtc_time64_to_tm)、闰年判断等,避免各个驱动重复实现。
8.3 电源管理集成
RTC子系统与内核电源管理(PM)框架深度集成,允许RTC作为唤醒源。
// 简化的电源管理回调示例
static int rtc_suspend(struct device *dev)
{
struct rtc_device *rtc = dev_get_drvdata(dev);
// 1. 如果驱动实现了自定义挂起回调,则调用它
if (rtc->ops->suspend)
return rtc->ops->suspend(dev);
// 2. 否则,禁用可能产生中断的功能(如闹钟),以降低功耗
// 这部分通常由核心层或驱动在必要时处理
return 0;
}
static int rtc_resume(struct device *dev)
{
struct rtc_device *rtc = dev_get_drvdata(dev);
if (rtc->ops->resume)
return rtc->ops->resume(dev);
// 恢复中断使能状态等
return 0;
}
在系统进入休眠(如mem)状态前,驱动程序可以在suspend回调中配置RTC的闹钟寄存器。当闹钟时间到达时,RTC产生的中断可以将系统从休眠中唤醒,这是实现定时开机等功能的基础。
9. 总结与展望
9.1 技术要点回顾
通过本文的深入分析,我们可以总结Linux RTC子系统的关键要点:
- 架构清晰:采用经典的分层架构,硬件驱动层、核心抽象层、接口层分离,符合Linux内核设计哲学,便于维护、扩展和移植。
- 数据结构精心设计:
rtc_device、rtc_class_ops、rtc_time等核心数据结构职责明确,平衡了通用性与硬件特殊性。
- 接口丰富统一:为用户空间提供了字符设备(
ioctl)和sysfs文件两种访问方式,满足了从脚本到复杂程序的不同需求。
- 与内核生态紧密结合:深度集成到设备模型、电源管理、时间子系统中,不是孤立模块。
- 调试支持完善:从用户空间的
hwclock、/proc接口,到内核态的动态调试、sysfs调试节点,提供了贯穿上下游的问题定位手段。
9.2 实际应用价值
RTC子系统虽然看似简单,但在实际系统中扮演着不可或缺的角色:
- 系统启动:提供可靠的初始时间基准,是系统日志、文件时间戳正确性的源头。
- 网络时间同步的兜底保障:当NTP等网络时间协议无法工作时,系统依赖RTC保存的“最后已知大致时间”。
- 定时功能:支持系统定时唤醒(WoL, Wake-on-RTC)、自动开关机等高级电源管理功能,广泛应用于服务器和嵌入式设备。
- 事件记录:在无网络环境的嵌入式设备中,RTC是记录事件发生时刻的唯一可靠来源。
理解Linux RTC子系统,不仅有助于解决实际运维中遇到的时间相关故障,更是深入理解Linux内核设备驱动模型、时间管理和电源管理等核心子系统的绝佳切入点。其简洁而高效的设计,是学习内核开发的优秀范例。
 发表于 2025-12-5 12:35:36
|
查看: 196|
回复: 0
发表于 2025-12-5 12:35:36
|
查看: 196|
回复: 0
