队列
队列是什么
队列本质是一块连续内存,被划分成等大小的槽,每个槽存一个数据单元。发送方把数据拷贝进槽,接收方从槽里拷贝出来——两边是独立副本,互不干扰。
三个创建参数:
- 队列长度:最多能存几个数据单元
- 数据单元大小:每个槽占几个字节(
sizeof(你的数据类型))
- 队列缓冲区:FreeRTOS 自动按「长度 × 单元大小」分配内存
默认 FIFO(先进先出),也可以用 xQueueSendToFront() 往队头插入,实现 LIFO。
队列 vs 信号量
| 对比维度 |
队列 |
信号量 |
| 核心用途 |
传数据 |
同步 / 互斥 |
| 存储内容 |
多个数据单元 |
计数值(0 或 n) |
| 典型场景 |
中断 → 任务传数据 |
事件通知、资源保护 |
相关例子
零拷贝:传递大数据指针
传递大结构体/数组时,直接拷贝数据效率低。可以在队列里只放指针,接收方通过指针访问数据:
#define BUF_SIZE 100
QueueHandle_t xPtrQueue;
void vGenerateTask(void *pv)
{
// 必须用 static 或动态分配,确保生命周期覆盖接收方处理期间
static uint8_t buf[BUF_SIZE];
for (;;)
{
for (int i = 0; i < BUF_SIZE; i++)
buf[i] = i;
// 先取指针,再发送指针变量的地址
uint8_t *pBuf = buf;
xQueueSend(xPtrQueue, &pBuf, portMAX_DELAY); // 拷贝的是4字节指针值
vTaskDelay(pdMS_TO_TICKS(2000));
}
}
void vConsumeTask(void *pv)
{
uint8_t *p;
for (;;)
{
if (xQueueReceive(xPtrQueue, &p, portMAX_DELAY) == pdPASS)
{
uint32_t sum = 0;
for (int i = 0; i < BUF_SIZE; i++)
sum += p[i];
printf("数据总和:%lu\r\n", sum);
}
}
}
// 创建:数据单元大小为指针大小
xPtrQueue = xQueueCreate(3, sizeof(uint8_t *));
任务间传递结构体
传感器采集 → 数据处理,经典生产者-消费者模型:
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
typedef struct
{
uint8_t temp;
uint8_t humi;
} SensorData_t;
QueueHandle_t xSensorQueue;
void vSensorTask(void *pv)
{
SensorData_t data;
uint8_t n = 0;
for (;;)
{
data.temp = 25 + n % 10;
data.humi = 60 + n % 20;
n++;
xQueueSend(xSensorQueue, &data, portMAX_DELAY);
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
void vProcessTask(void *pv)
{
SensorData_t d;
for (;;)
{
if (xQueueReceive(xSensorQueue, &d, portMAX_DELAY) == pdPASS)
{
printf("温度 %d℃ 湿度 %d%%\r\n", d.temp, d.humi);
}
}
}
// main 中创建队列和任务
xSensorQueue = xQueueCreate(5, sizeof(SensorData_t));
xTaskCreate(vSensorTask, "Sensor", 128, NULL, 2, NULL);
xTaskCreate(vProcessTask, "Process", 128, NULL, 3, NULL);
vTaskStartScheduler();
中断 → 任务(串口接收)
QueueHandle_t xUartQueue;
// 中断服务函数:快进快出,只往队列塞数据
void USART1_IRQHandler(void)
{
BaseType_t xWoken = pdFALSE;
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
uint8_t ch = USART_ReceiveData(USART1);
xQueueSendFromISR(xUartQueue, &ch, &xWoken);
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
portYIELD_FROM_ISR(xWoken); // 若唤醒了更高优先级任务,立即切换
}
// 处理任务:在任务上下文做真正的业务逻辑
void vUartTask(void *pv)
{
uint8_t ch;
for (;;)
{
if (xQueueReceive(xUartQueue, &ch, portMAX_DELAY) == pdPASS)
{
printf("收到字节:0x%02X\r\n", ch);
}
}
}
工作原理
内存结构
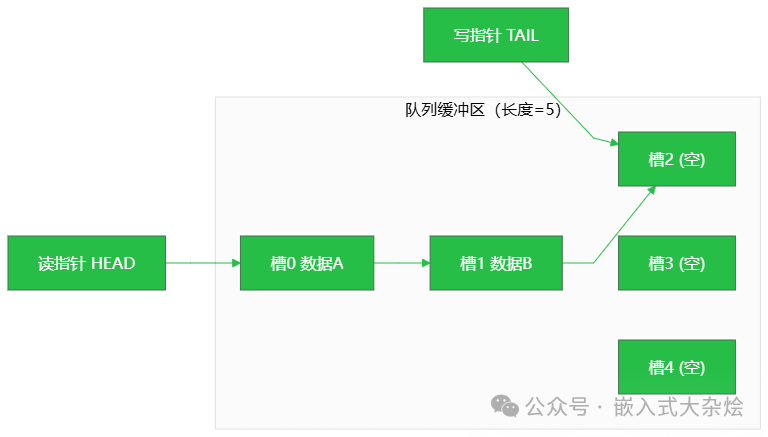
FreeRTOS 用读写指针理队列,同时记录已用槽数和空闲槽数,发送/接收时原子更新,保证线程安全。
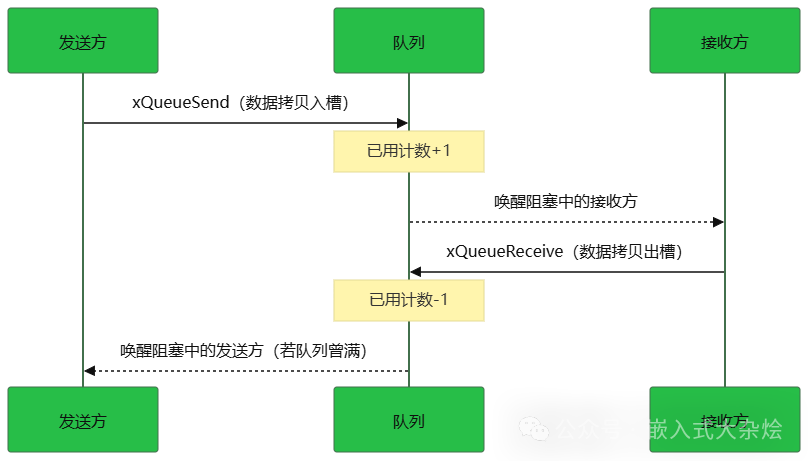
发送与接收流程
阻塞模式
发送/接收时可指定 xTicksToWait 阻塞等待:
| 配置 |
行为 |
适用场景 |
0 |
立即返回,不等 |
中断中操作队列(必须用这个) |
n ticks |
最多等 n 个 tick,超时返回失败 |
有超时容忍的场景 |
portMAX_DELAY |
永久阻塞直到成功 |
接收任务等待数据 |
核心 API
创建队列
// 函数原型
QueueHandle_t xQueueCreate(UBaseType_t uxQueueLength, UBaseType_t uxItemSize);
// 存结构体数据的队列
typedef struct {
uint8_t temp;
uint8_t humi;
} SensorData_t;
QueueHandle_t xSensorQueue;
xSensorQueue = xQueueCreate(5, sizeof(SensorData_t));
if (xSensorQueue == NULL) {
// 内存不足,队列创建失败
configASSERT(0);
}
静态分配版本:资源受限场景可用 xQueueCreateStatic() 避免动态内存碎片:
// 静态创建:内存由调用方提供,不依赖 heap
#define QUEUE_LEN 5
static StaticQueue_t xQueueBuffer;
static uint8_t ucQueueStorage[ QUEUE_LEN * sizeof(SensorData_t) ];
xSensorQueue = xQueueCreateStatic(QUEUE_LEN, sizeof(SensorData_t),
ucQueueStorage, &xQueueBuffer);
// 静态创建不会返回 NULL,无需判断
发送数据
BaseType_t xQueueSend(QueueHandle_t xQueue, const void *pvItemToQueue, TickType_t xTicksToWait);
参数说明:
| 参数 |
含义 |
xQueue |
目标队列句柄 |
pvItemToQueue |
待发送数据的指针,FreeRTOS 会将其内容 memcpy 进队列槽,调用后原变量可随意修改 |
xTicksToWait |
队列满时的最大等待 Tick 数;0 表示不等待立即返回,portMAX_DELAY 表示永久等待 |
返回值: 数据成功写入队列返回 pdPASS,超时或队列满(xTicksToWait == 0)返回 errQUEUE_FULL。
xQueueSend 等价于 xQueueSendToBack,数据追加到队尾(FIFO)。若需插队到队头,使用 xQueueSendToFront。
底层做了什么? xQueueSend 实际是宏,展开后调用 xQueueGenericSend()。整个函数的流程如:
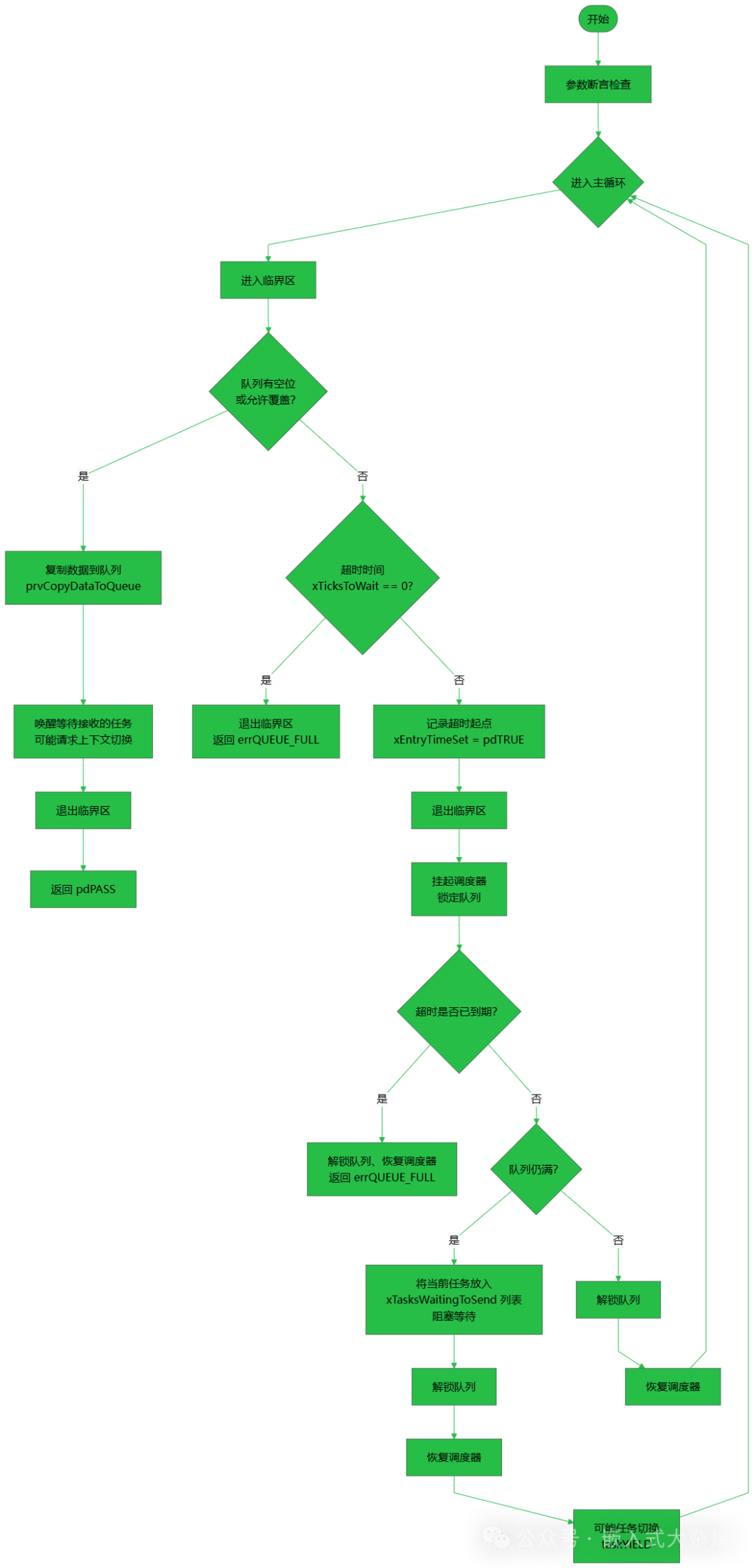
对应源码的关键片段如:
for( ; ; )
{
taskENTER_CRITICAL();
{
if( pxQueue->uxMessagesWaiting < pxQueue->uxLength ) /* 有空位 */
{
/* 数据拷贝 */
prvCopyDataToQueue( pxQueue, pvItemToQueue, xCopyPosition );
/* 唤醒正在等数据的接收任务 */
if( !listLIST_IS_EMPTY( &pxQueue->xTasksWaitingToReceive ) )
xTaskRemoveFromEventList( &pxQueue->xTasksWaitingToReceive );
taskEXIT_CRITICAL();
return pdPASS;
}
else/* 队列满了 */
{
if( xTicksToWait == 0 )
{
taskEXIT_CRITICAL();
return errQUEUE_FULL; /* 告诉调用者:满了 */
}
vTaskInternalSetTimeOutState( &xTimeOut );
}
}
taskEXIT_CRITICAL();
vTaskSuspendAll();
prvLockQueue( pxQueue );
if( xTaskCheckForTimeOut( &xTimeOut, &xTicksToWait ) == pdFALSE )
{
/* 还没超时,把自己挂到"等待发送"链表,让出 CPU */
vTaskPlaceOnEventList( &pxQueue->xTasksWaitingToSend, xTicksToWait );
prvUnlockQueue( pxQueue );
xTaskResumeAll();
}
else
{
prvUnlockQueue( pxQueue );
xTaskResumeAll();
return errQUEUE_FULL; /* 超时了,放弃 */
}
}
xQueueSend 的几种常见用法:
-
发送基本类型,不阻塞(队列满了就丢弃)
uint8_t val = 0xA5;
if (xQueueSend(xSensorQueue, &val, 0) != pdPASS) {
// 队列满,数据没发出去,按业务需求决定是丢弃还是重试
}
-
发送结构体,无限等待(适合生产者不允许丢数据的场景)
SensorData_t data = { .temp = 26, .humi = 65 };
xQueueSend(xSensorQueue, &data, portMAX_DELAY);
-
有限等待 100ms,超时当发送失败处理
if (xQueueSend(xSensorQueue, &data, pdMS_TO_TICKS(100)) != pdPASS) {
printf("发送超时\r\n");
}
若要实现 LIFO(新数据优先被取走),用 xQueueSendToFront:
SensorData_t urgentData = { .temp = 99, .humi = 99 };
xQueueSendToFront(xSensorQueue, &urgentData, 0);
接收数据
BaseType_t xQueueReceive(QueueHandle_t xQueue, void *pvBuffer, TickType_t xTicksToWait);
参数说明:
| 参数 |
含义 |
xQueue |
目标队列句柄 |
pvBuffer |
接收缓冲区指针,数据将被拷贝到此处,大小须 ≥ 创建队列时指定的 uxItemSize |
xTicksToWait |
队列为空时的最大等待 Tick 数;0 表示不等待立即返回,portMAX_DELAY 表示永久等待 |
返回值: 成功取到数据返回 pdPASS,超时或队列为空(xTicksToWait == 0)返回 errQUEUE_EMPTY。
内部执行流程
结合源码(queue.c: xQueueReceive),整个过程是一个带超时的循环:
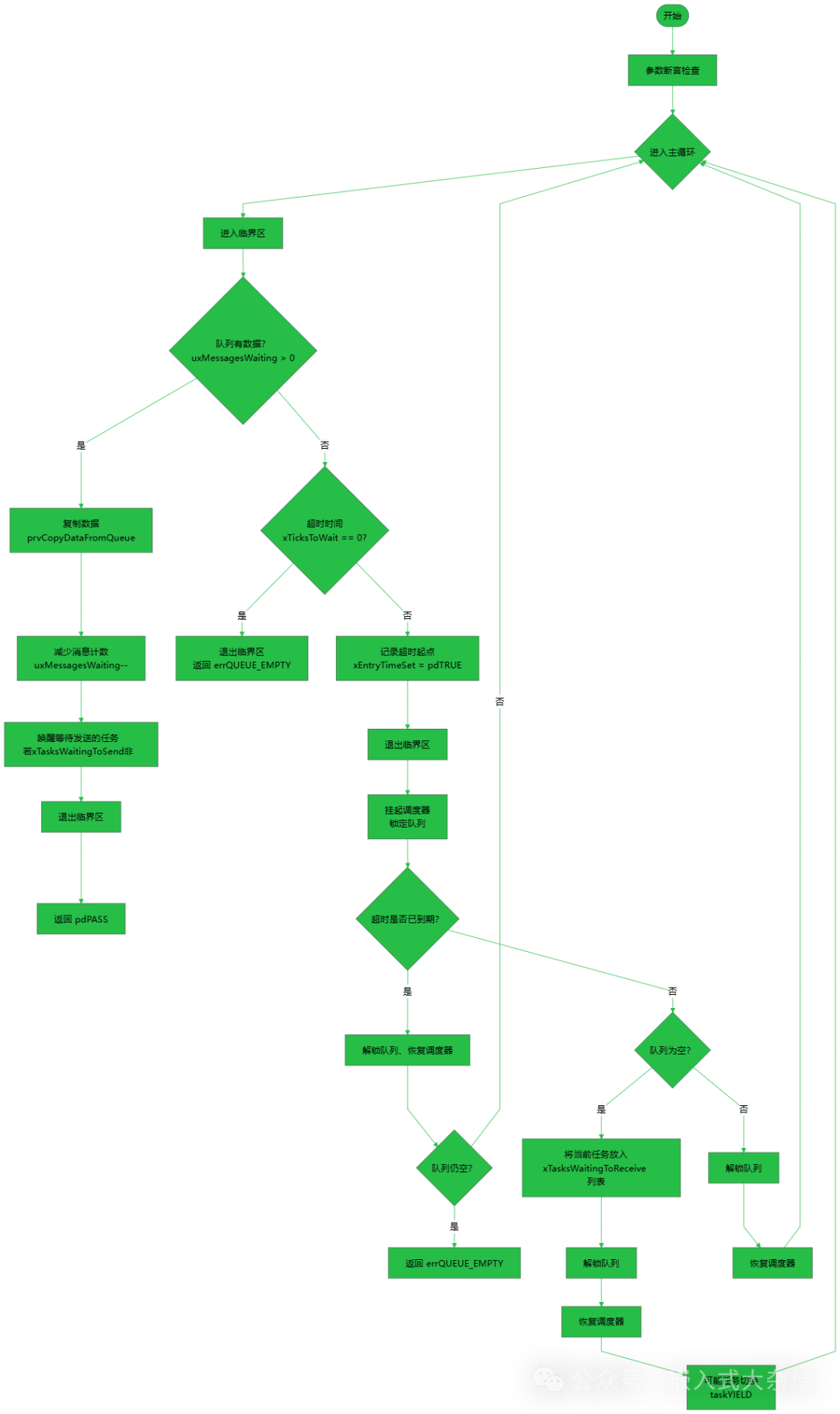
对应关键源码:
for( ; ; )
{
taskENTER_CRITICAL();
{
if( pxQueue->uxMessagesWaiting > 0 ) /* 队列有数据 */
{
/* 把队头数据 memcpy 到 pvBuffer,pcReadFrom 指针后移 */
prvCopyDataFromQueue( pxQueue, pvBuffer );
pxQueue->uxMessagesWaiting--;
/* 取出数据腾出了空位,唤醒因队满而阻塞的发送任务 */
if( !listLIST_IS_EMPTY( &pxQueue->xTasksWaitingToSend ) )
xTaskRemoveFromEventList( &pxQueue->xTasksWaitingToSend );
taskEXIT_CRITICAL();
return pdPASS;
}
else/* 队列为空 */
{
if( xTicksToWait == 0 )
{
taskEXIT_CRITICAL();
return errQUEUE_EMPTY; /* 告知调用者:空了 */
}
vTaskInternalSetTimeOutState( &xTimeOut ); /* 记录开始等待的时间戳(仅首次) */
}
}
taskEXIT_CRITICAL();
vTaskSuspendAll();
prvLockQueue( pxQueue );
if( xTaskCheckForTimeOut( &xTimeOut, &xTicksToWait ) == pdFALSE )
{
/* 还没超时,把自己挂到"等待接收"链表,让出 CPU */
vTaskPlaceOnEventList( &pxQueue->xTasksWaitingToReceive, xTicksToWait );
prvUnlockQueue( pxQueue );
xTaskResumeAll();
}
else
{
prvUnlockQueue( pxQueue );
xTaskResumeAll();
return errQUEUE_EMPTY; /* 超时,放弃等待 */
}
}
典型用法
-
阻塞等待,直到取到数据(最常见写法)
SensorData_t rxData;
if (xQueueReceive(xSensorQueue, &rxData, portMAX_DELAY) == pdPASS)
{
printf("温度:%d℃,湿度:%d%%\r\n", rxData.temp, rxData.humi);
}
-
带超时:等 100ms,超时则执行兜底逻辑
if (xQueueReceive(xSensorQueue, &rxData, pdMS_TO_TICKS(100)) == pdPASS)
{
process(&rxData);
}
else
{
// 100ms 内没收到数据,可能传感器故障
log_warn("sensor timeout");
}
-
非阻塞轮询(xTicksToWait = 0)
if (xQueueReceive(xSensorQueue, &rxData, 0) == pdPASS)
{
// 有数据就处理,没有就跳过
}
xQueuePeek:只看不取
// xQueuePeek:只看不取,数据仍留在队列中
SensorData_t peekData;
if (xQueuePeek(xSensorQueue, &peekData, 0) == pdPASS)
{
// 数据依然在队列里,下次 Receive 仍能取到
printf("队头温度预览:%d℃\r\n", peekData.temp);
}
xQueuePeek 与 xQueueReceive 流程几乎相同,区别在于拷贝完数据后会把 pcReadFrom 恢复到原位,数据不会被消耗。适合"先检查、再决定要不要取"的场景,但多任务下需小心竞争(Peek 之后另一个任务可能先 Receive 走了)。
查询队列状态
// 查询队列当前状态
UBaseType_t waiting = uxQueueMessagesWaiting(xSensorQueue); // 已有几个数据
UBaseType_t spaces = uxQueueSpacesAvailable(xSensorQueue); // 还剩几个空位
printf("队列状态:已用 %u,空闲 %u\r\n", waiting, spaces);
// [中断](https://yunpan.plus/f/34-1)上下文查询已用数量
UBaseType_t waitingISR = uxQueueMessagesWaitingFromISR(xSensorQueue);
中断安全 API
中断中必须使用带 FromISR 后缀的版本,且 xTicksToWait 固定为 0:
// 函数原型
BaseType_t xQueueSendFromISR(QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken);
BaseType_t xQueueReceiveFromISR(QueueHandle_t xQueue,
void *pvBuffer,
BaseType_t *pxHigherPriorityTaskWoken);
总结
三句话记核心:
- 队列 = 数据中转站,支持 FIFO/LIFO,多发多收。
- 中断里操作队列必须用 FromISR API,且不能阻塞。
- 零拷贝传指针,注意内存生命周期。
队列是FreeRTOS中任务间通信最核心、最灵活的机制之一。理解其内部原理,掌握零拷贝、中断处理等高级用法,对于构建高效可靠的嵌入式系统至关重要。如果你想查看更多关于嵌入式开发或系统设计的深度解析,欢迎访问 云栈社区 交流探讨。
 发表于 2026-3-4 06:59:00
|
查看: 161|
回复: 0
发表于 2026-3-4 06:59:00
|
查看: 161|
回复: 0
