这张图清晰地展示了线性代数中的两个核心概念:子空间和基。我们将跟随图中的脉络,一步步拆解清楚。
什么是子空间
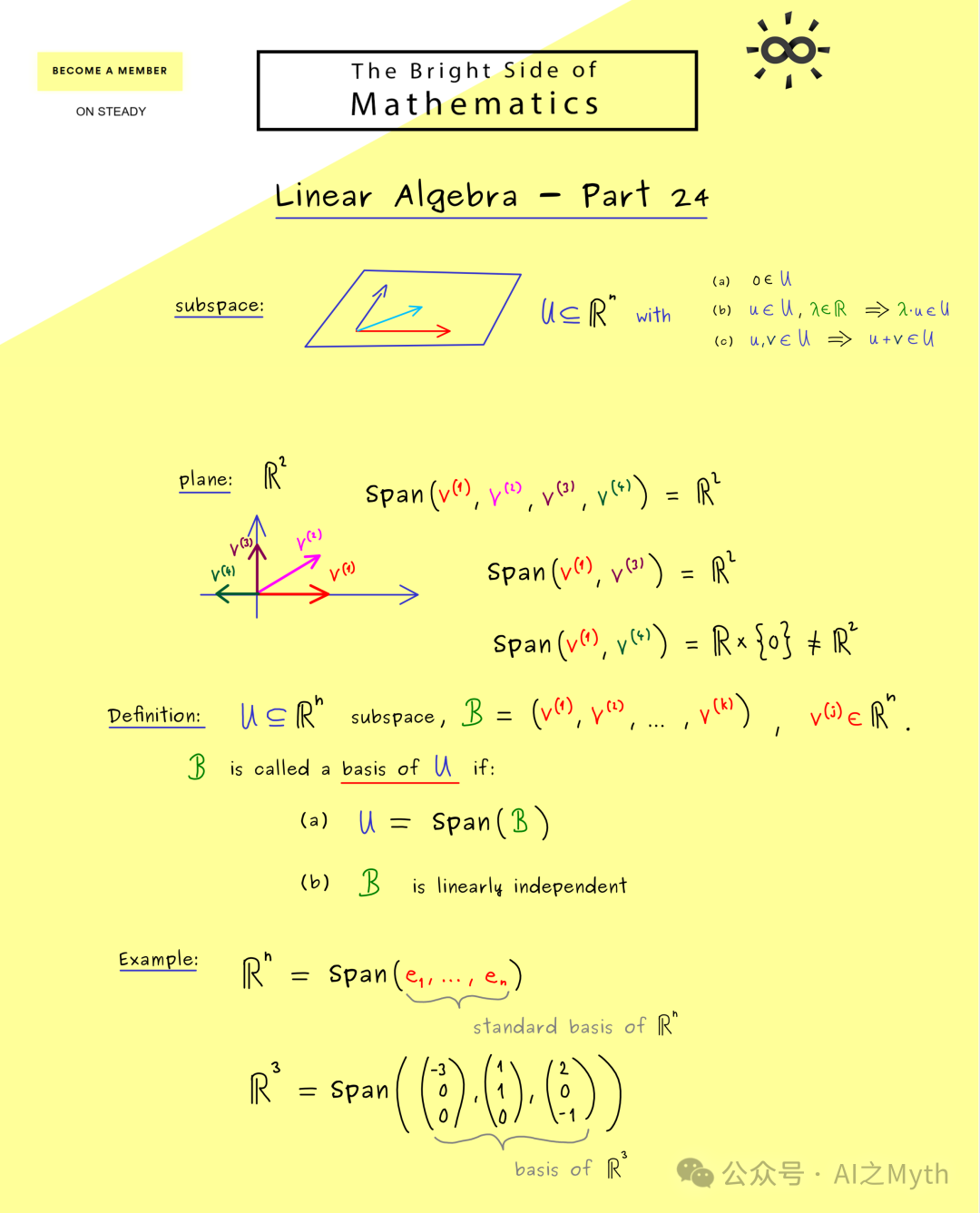
图片左上角给出了定义:
$U \subseteq R^n$
意思是,$U$ 是 $R^n$ 里的一个集合,我们要判断它是否为子空间。
右边列出了成为子空间的三个条件:
(a) $0 \in U$
零向量必须属于 $U$。
这一点很关键,它意味着子空间必须“经过原点”。
(b) $u \in U, \lambda \in R \Rightarrow \lambda \cdot u \in U$
如果向量 $u$ 在 $U$ 里,那么它的任意实数倍 $\lambda u$ 也必须在 $U$ 里。这被称为对数乘封闭。
例如,过原点的一条直线上的向量,无论放大、缩小还是反向,都仍然在这条线上。
(c) $u, v \in U \Rightarrow u+v \in U$
如果两个向量都在 $U$ 里,那么它们的和也必须在 $U$ 里。这被称为对加法封闭。
直观理解
图中画了一个倾斜平面和几支箭头,就是为了说明:
- 这个平面上的向量做加法,结果还在平面上;
- 做数乘,结果也在平面上;
- 并且它包含零向量。
满足这些,这个集合就是一个子空间。
平面 $R^2$ 中“张成 (Span)”的例子
图的中间部分展示了 $R^2$ 中的几个向量 $v^{(1)}, v^{(2)}, v^{(3)}, v^{(4)}$,用以说明:哪些向量组能张成整个平面,哪些不能。
第一行:$Span(v^{(1)}, v^{(2)}, v^{(3)}, v^{(4)}) = R^2$
这四个向量的所有线性组合,能够覆盖整个 $R^2$。
实际上在二维空间里,只要这四个向量中有两个不共线,它们的组合就足以张成整个平面,再多加向量也一样。
第二行:$Span(v^{(1)}, v^{(3)}) = R^2$
图中 $v^{(1)}$ 是水平向右,$v^{(3)}$ 是竖直向上。这两个方向显然不共线,因此它们足以生成整个平面。
也就是说,平面内任意向量 $(x, y)$ 都可以唯一地写成:
$$(x, y) = x \cdot v^{(1)} + y \cdot v^{(3)}$$
这本质上就是二维
标准基的思想。
第三行:$Span(v^{(1)}, v^{(2)}) = R \times \{0\} \neq R^2$
这一行很关键。从图上看,$v^{(1)}$ 和 $v^{(2)}$ 都在 $x$ 轴上,只是方向相反。因此,它们只能产生水平方向的向量。
它们的线性组合只能得到:
$$\alpha \cdot v^{(1)} + \beta \cdot v^{(2)} = (\alpha - \beta, 0)$$
这对应着整个
$x$ 轴:
$R \times \{0\}$。
它并非整个平面
$R^2$,所以这两个向量
不能张成 $R^2$。
基 (Basis) 的定义
图片中间偏下给出了定义:
设 $U \subseteq R^n$ 是一个子空间, $B = (v^{(1)}, v^{(2)}, ..., v^{(k)})$, 其中每个 $v^{(j)} \in R^n$。
如果满足两个条件,那么 $B$ 叫做 $U$ 的一个基。
条件 (a):$U = span(B)$
这意味着 $B$ 中的向量能够生成整个 $U$。也就是说,$U$ 中任何一个向量,都能由 $B$ 里的向量线性组合出来。
条件 (b):$B$ is linearly independent
这意味着 $B$ 中的这些向量必须是线性无关的,即其中没有“多余的”向量。
基的本质:既够用,又不多余
所以,基可以概括为一句话:
基 = 能张成整个空间的一组线性无关向量
换成更通俗的理解:
- 能张成:说明这组向量“够用”。
- 线性无关:说明这组向量“不冗余”。
这两个条件缺一不可。
图片中的两个例子
例 1:$R^n$ 的标准基 (Standard Basis)
这里 $e_1, ..., e_n$ 是标准基向量:
$$e_1 = (1, 0, 0, ..., 0), e_2 = (0, 1, 0, ..., 0), ..., e_n = (0, 0, 0, ..., 1)$$
它们被称为
$R^n$ 的
标准基。因为任何向量
$x = (x_1, x_2, ..., x_n)$ 都可以唯一地写成:
$$x = x_1 e_1 + x_2 e_2 + ... + x_n e_n$$
并且这
$n$ 个向量彼此线性无关,所以它们构成
$R^n$ 的一个基。
例 2:$R^3$ 的另一组基
图片最后写道:
$R^3 = Span((-3, 0, 0), (1, 1, 0), (2, 0, -1))$, basis of $R^3$
意思是,这三个向量也能构成 $R^3$ 的一个基。这说明一个事实:
$R^3$ 的基不只有标准基一种。
只要在三维空间中取三个线性无关的向量,它们就能张成整个 $R^3$,因而构成一个基。
核心逻辑梳理
整张图的核心逻辑链非常清晰:
第一步:定义子空间
一个集合要成为子空间,必须:
第二步:理解张成 (Span)
若干向量的所有线性组合,形成一个空间。
- 两个不共线的向量在 $R^2$ 中能张成整个平面。
- 两个共线的向量只能张成一条直线。
第三步:引出基
如果一组向量:
- 能张成某个子空间;
- 又线性无关;
那么它们就是这个子空间的基。
关键总结
这页内容可以浓缩成一句话:
Basis = Span + Linear Independence
即:
- Span 决定了“覆盖范围”。
- Linear Independence 决定了“有无冗余”。
- 两者结合,就是 Basis。
接下来,我们将结合一个具体的数值例子,将子空间、张成、基这三个概念完整地串联计算一遍,并深入探讨基为何如此重要。
先厘清三个连续概念
图中涉及三个连续概念:子空间 (Subspace)、张成 (Span)、基 (Basis)。初学者容易混淆,我们逐一拆解。
1. 子空间:判断“是否合法”
一个集合 $U \subseteq R^n$,如果满足:
- $0 \in U$
- 对数乘封闭
- 对加法封闭
那么它就是 $R^n$ 里的一个子空间。它是一个内部运算封闭的“向量世界”。
2. 张成:判断“能铺多大”
给定一组向量 $v^{(1)}, v^{(2)}, ..., v^{(k)}$,它们的张成是:
$$Span(v^{(1)}, v^{(2)}, ..., v^{(k)}) = \{\lambda_1 v^{(1)} + ... + \lambda_k v^{(k)} | \lambda_i \in R\}$$
即,这些向量所有可能的线性组合构成的集合。它关心的是:
这些向量能‘生成’出什么样的空间?
3. 基:判断“是否最省”
如果一组向量 $B$ 满足:
- $U = Span(B)$
- $B$ 线性无关
那么 $B$ 就是 $U$ 的一个基。它的本质是:用最少但足够的向量,来描述整个空间。
图中 $R^2$ 例子的进一步解析
图中展示了 $R^2$ 中的四个向量:$v^{(1)}$ (右), $v^{(2)}$ (左), $v^{(3)}$ (上), $v^{(4)}$ (右上)。
情况1:两个不同方向的向量
图中说 $Span(v^{(1)}, v^{(3)}) = R^2$。因为它们一个提供水平方向,一个提供竖直方向,足以铺满整个平面。此时它们不仅是张成,而且线性无关,因此它们就是 $R^2$ 的一组基。
情况2:两个共线向量
图中说 $Span(v^{(1)}, v^{(2)}) \neq R^2$。因为 $v^{(1)}$ 和 $v^{(2)}$ 都在 x 轴上,无论怎么组合,都只能得到 $(x, 0)$ 形式的向量,无法得到 y 分量。这说明:向量数量多不一定有用,方向是否真正不同才关键。
情况3:向量很多,但有冗余
图中写 $Span(v^{(1)}, v^{(2)}, v^{(3)}, v^{(4)}) = R^2$。这当然成立,因为其中已包含足够的方向。但这四个向量不是基,因为在二维空间里,四个向量必然线性相关,存在冗余。所以:
为何“线性无关”如此关键?
假设一组向量中,其中一个能被其他向量线性表示,例如 $v^{(3)} = v^{(1)} + v^{(2)}$,那么 $v^{(3)}$ 就是“多余的”。因为仅用 $v^{(1)}$ 和 $v^{(2)}$ 就已经能组合出 $v^{(3)}$ 了。这样的向量组虽然能张成空间,但不够简洁。因此,基的线性无关性确保了:基里的每个向量都是不可或缺、不可替代的。
基的核心价值:表示的唯一性
这是“基”最重要的一个结论。
如果 $B = (b^{(1)}, b^{(2)}, ..., b^{(k)})$ 是子空间 $U$ 的一个基,那么 $U$ 中每个向量 $u$ 都能唯一地写成:
$$u = \lambda_1 b^{(1)} + \lambda_2 b^{(2)} + ... + \lambda_k b^{(k)}$$
为何唯一?
- 基能张成 $U$:所以“至少能写出来”一种表示。
- 基线性无关:所以“不会出现两种不同写法”。
假设有两种表示:$u = \sum \lambda_i b^{(i)} = \sum \mu_i b^{(i)}$。两边相减得:$\sum (\lambda_i - \mu_i) b^{(i)} = 0$。由于向量线性无关,所有系数差必须为零,即 $\lambda_i = \mu_i$。因此表示唯一。
坐标的起源
一旦选定一个基 $B$,任何向量 $u$ 都有唯一表示 $u = \sum \lambda_i b^{(i)}$。那么这组系数 $(\lambda_1, \lambda_2, ..., \lambda_k)$ 就称为 $u$ 在基 $B$ 下的坐标。
所以,你可以把“基”理解为:为空间选定的一套参考方向或坐标系。 不同的基,对应着不同的坐标系。
图中的标准基与自定义基
图中最经典的例子是 $R^n$ 的标准基 $e_1, ..., e_n$。比如在 $R^3$ 中,任意向量 $(x, y, z)$ 都能唯一写成 $x e_1 + y e_2 + z e_3$,这里的 $(x, y, z)$ 就是它在标准基下的坐标。
图最后给出 $R^3$ 的另一组基:$(-3, 0, 0), (1, 1, 0), (2, 0, -1)$。这说明:
一个空间的基不是唯一的。
只要在三维空间中找到三个线性无关的向量,它们就能张成整个 $R^3$,从而构成一组基。
为什么这组向量能成基?观察:
图的暗示:维数 (Dimension)
虽然图中未明写“维数”,但已在铺垫。在 $R^2$ 中,一组基有2个向量,故维数为2。在 $R^3$ 中,一组基有3个向量,故维数为3。更一般地:一个子空间的任意一组基,其向量个数都相同,这个个数称为该子空间的维数。 即:维数 = 基向量的个数。
完整理解链条
你可以将整页内容压缩为以下清晰链条:
- 选定一个集合 $U$。
- 检查它是否为子空间(含零、加法和数乘封闭)。
- 选取一些向量,看它们的 $Span$ 是什么。
- 如果 $Span$ 正好等于 $U$,说明这些向量能生成 $U$。
- 如果这些向量同时线性无关,说明没有冗余。
- 于是这组向量就是 $U$ 的基。
最实用的判断准则
以后判断一组向量是否是某子空间的基,只需检查两件事:
- 它们是否张成该子空间?
- 它们是否线性无关?
具体实例:串联子空间、张成与基
我们用一个具体的 $R^3$ 中的例子,将这三个概念完整演算一遍。
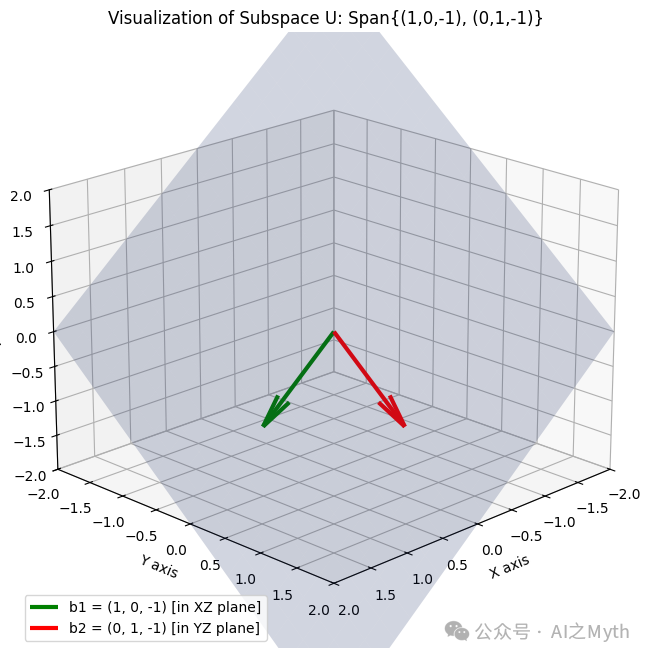
考虑集合:
$$U = \{ (x, y, z) \in R^3 \mid x + y + z = 0 \}$$
这是
$R^3$ 中一个过原点的平面。
第一步:判断 $U$ 是否为子空间
检查三个条件:
-
零向量属于 $U$:
零向量是 $(0,0,0)$。代入条件 $0+0+0=0$,成立。满足。
-
对数乘封闭:
任取 $u = (x, y, z) \in U$,则 $x+y+z=0$。任取实数 $\lambda$,看 $\lambda u = (\lambda x, \lambda y, \lambda z)$ 是否仍在 $U$ 中。计算:$\lambda x + \lambda y + \lambda z = \lambda (x+y+z) = \lambda \cdot 0 = 0$。所以 $\lambda u \in U$。满足。
-
对加法封闭:
任取 $u = (x_1, y_1, z_1) \in U$,$v = (x_2, y_2, z_2) \in U$,则 $x_1+y_1+z_1=0$, $x_2+y_2+z_2=0$。看它们的和 $u+v = (x_1+x_2, y_1+y_2, z_1+z_2)$ 是否仍在 $U$ 中。计算:$(x_1+x_2)+(y_1+y_2)+(z_1+z_2) = (x_1+y_1+z_1)+(x_2+y_2+z_2)=0+0=0$。所以 $u+v \in U$。满足。
结论:$U$ 是 $R^3$ 的一个子空间。
第二步:将 $U$ 表示为 Span 的形式
已知 $U$ 中任意向量 $(x, y, z)$ 满足 $x+y+z=0$,即 $z = -x - y$。
因此,任意 $u \in U$ 都可以写成:
$$u = (x, y, -x-y)$$
将其拆开:
$$u = (x, 0, -x) + (0, y, -y)$$
提取系数
$x$ 和
$y$:
$$u = x \cdot (1, 0, -1) + y \cdot (0, 1, -1)$$
这说明
$U$ 中的向量都能由
$a = (1, 0, -1)$ 和
$b = (0, 1, -1)$ 线性组合出来。反之,任意取
$x, y \in R$,得到的向量
$(x, y, -x-y)$ 一定满足
$x+y+(-x-y)=0$,属于
$U$。因此:
$$U = Span\{ (1, 0, -1),\ (0, 1, -1) \}$$
第三步:验证 Span
例如,取 $u_1 = (2, -1, -1) \in U$(因为 $2+(-1)+(-1)=0$)。看它能否由 $a, b$ 生成:设 $u_1 = x a + y b$,即 $(2, -1, -1) = (x, y, -x-y)$。比较坐标得 $x=2, y=-1$,第三坐标自动满足 $-2-(-1) = -1$。所以 $u_1 = 2a + (-1)b$。
第四步:判断 $\{a, b\}$ 是否为 $U$ 的基
判断基只需两件事:1) 张成 $U$;2) 线性无关。
- 张成:上面已证明 $U = Span\{a, b\}$。
- 线性无关:设 $\lambda_1 a + \lambda_2 b = (0,0,0)$,即 $(\lambda_1, \lambda_2, -\lambda_1 - \lambda_2) = (0,0,0)$。比较前两个坐标,直接得到 $\lambda_1 = 0, \lambda_2 = 0$。所以 $a, b$ 线性无关。
结论:$B = \{ (1,0,-1),\ (0,1,-1) \}$ 是子空间 $U$ 的一个基。
第五步:为什么是“够用但不多余”
- 够用:因为 $Span(B) = U$,$U$ 中所有向量都能由它们表示。
- 不多余:因为 $a, b$ 线性无关。$a$ 不是 $b$ 的倍数,反之亦然。两个方向都是真正需要的。
第六步:反例对比
- 情况 A (能张成,非基):考虑 $\{a, b, a+b\}$。显然 $Span\{a, b, a+b\} = U$,但 $a+b$ 可由 $a$ 和 $b$ 表示,三者线性相关,故不是基。
- 情况 B (线性无关,张成不足):只取 $\{a\}$。单个非零向量线性无关,但 $Span\{a\}$ 只是一条直线,不等于平面 $U$,故不是基。
第七步:任意向量的坐标表示
因为 $B$ 是基,所以 $U$ 中任意向量 $u = (x, y, z)$ 都有唯一表示:$u = x \cdot a + y \cdot b$。
因此,$u$ 在基 $B$ 下的坐标就是 $(x, y)$。
注意:$u$ 本身在 $R^3$ 中有3个坐标,但它属于二维子空间 $U$,所以相对于该子空间的基,只需2个坐标即可。这印证了 $U$ 是二维的。
第八步:基不唯一
同一个子空间 $U$,基不唯一。例如取 $c=(1,-1,0), d=(0,1,-1)$。它们都在 $U$ 中($1+(-1)+0=0$, $0+1+(-1)=0$),且不是倍数关系,线性无关。由于 $U$ 是二维平面,两个独立方向足以张成它,所以 $\{c, d\}$ 也是 $U$ 的一组基。事实上,原基向量 $a = c + d$。
最终小结
在这个具体例子中,我们完整地串联了三个概念:
- 子空间 $U$:$R^3$ 中满足 $x+y+z=0$ 的平面,是一个合法的向量空间。
- 张成:$U = Span\{ (1,0,-1),\ (0,1,-1) \}$,说明了这个平面由哪些向量生成。
- 基:$B = \{ (1,0,-1),\ (0,1,-1) \}$,是从生成向量中选出的一组既够用(张成 $U$)又不多余(线性无关)的向量。
基 $B$ 包含2个向量,因此子空间 $U$ 的维数为 2。
理解子空间、张成和基的关系,是掌握线性代数底层逻辑的关键。希望本文的逐步解析与实例,能帮助你彻底搞懂这些核心概念。欢迎在云栈社区继续探讨更多数学与计算机科学的基础话题。
 发表于 2026-3-29 03:20:55
|
查看: 105|
回复: 0
发表于 2026-3-29 03:20:55
|
查看: 105|
回复: 0
