过去数月,AI领域很难绕开一个名字——OpenClaw。这个项目在极短时间内获得了爆发式关注:数十万星标、惊人的Token消耗,以及几乎所有大厂的快速跟进。表面上看,它像是一个现象级产品;但如果进一步审视,一个更值得思考的问题浮现:OpenClaw的出现,究竟意味着什么?它是一次真正的技术突破,还是某种更深层变化的信号?
近日,端侧智能北京市重点实验室在清华科技园召开了关于智能体的创新研讨会。会上,来自产学界的8位嘉宾从底层技术、演变趋势、端云协同、安全及实践等维度,深入探讨了OpenClaw背后的技术逻辑及未来趋势。中国人民大学副教授林衍凯在会上作了题为《从OpenClaw看智能体技术发展趋势》的报告。

林衍凯教授试图回答三个本质问题:第一,当前的智能体技术究竟走到了哪一步?第二,它真正的核心瓶颈在哪里?第三,未来一到三年,这条技术路径会如何演进?他通过系统性地拆解架构、交互方式和基座模型,提出了一个“反直觉”的判断:OpenClaw并非底层算法的突破,而是通过工程化整合,让大模型能力跨过了“可用阈值”。它更像一个智能体操作系统的早期雏形,其爆发是模型能力与工程体系在同一时间点共振的结果。
OpenClaw爆火的本质:一场“可用性革命”
让我们先看一组数据:OpenClaw在24小时内获得9000个GitHub星标,两个月内突破27万,甚至超越了Linux,成为历史上星标最多的项目。在OpenRouter平台上,其一周期内的Token消耗量高达4.73T,比榜单上其他项目的总和还要多。与此同时,国内大厂纷纷跟进,多地政府也出台了相关扶持政策。
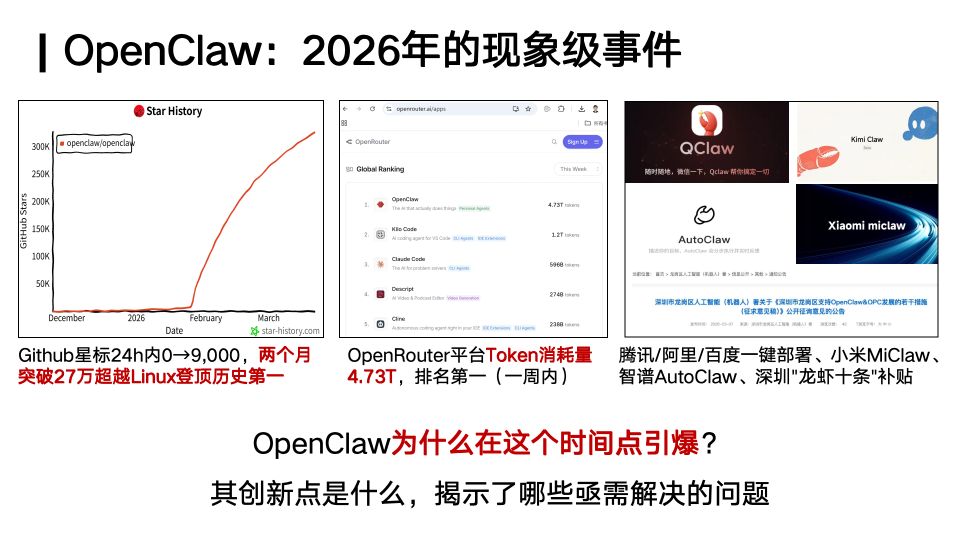
那么,它为何在今天这个时间点引爆?从技术角度看,OpenClaw真的创新了吗?
林衍凯教授给出了一个“暴论”:从AI技术创新的角度看,OpenClaw其实并没有太多创新,它是对已有技术的卓越工程整合。它不训练模型,不改进推理算法,也不做底层的工具学习。它所做的是IM通讯平台接入、本地部署架构、分层记忆以及Gateway的标准化——这些都是优秀的软件工程设计,而非核心算法突破。
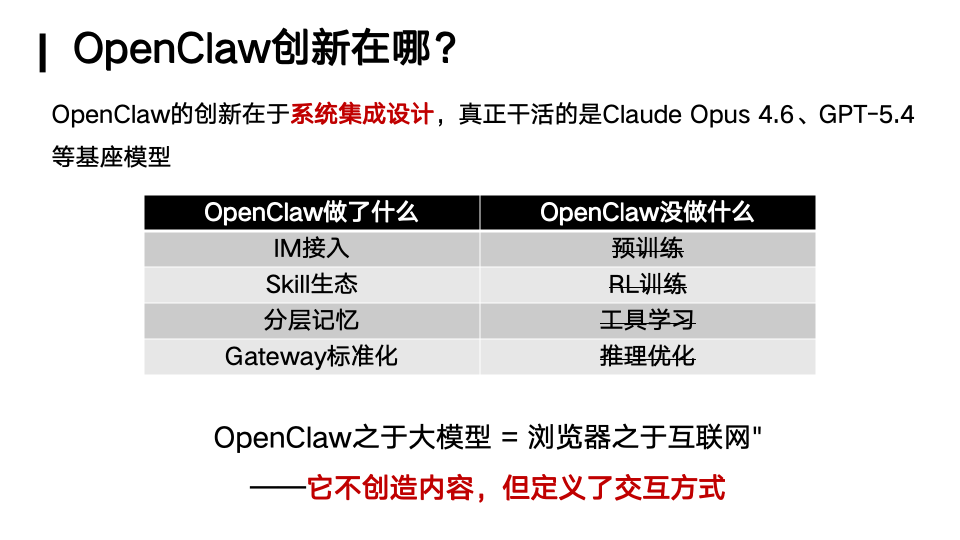
系统中真正“干活”、提供良好体验的,是它所接入的Claude Opus 4.6或GPT-5.4等基座模型。林衍凯认为,OpenClaw之于大模型,类似于浏览器之于互联网——它本身不创造内容,但重新定义了交互方式,让非技术背景的用户也能顺畅地将大模型能力应用到实际工作中。
正因如此,OpenClaw成为了一个绝佳的技术分析样本。它的成功揭示了哪些技术已经成熟(如基座模型的工具调用能力),同时也暴露了当前技术的短板(如系统可靠性、记忆迁移、端云协同)。
从工程架构看:智能体操作系统的雏形
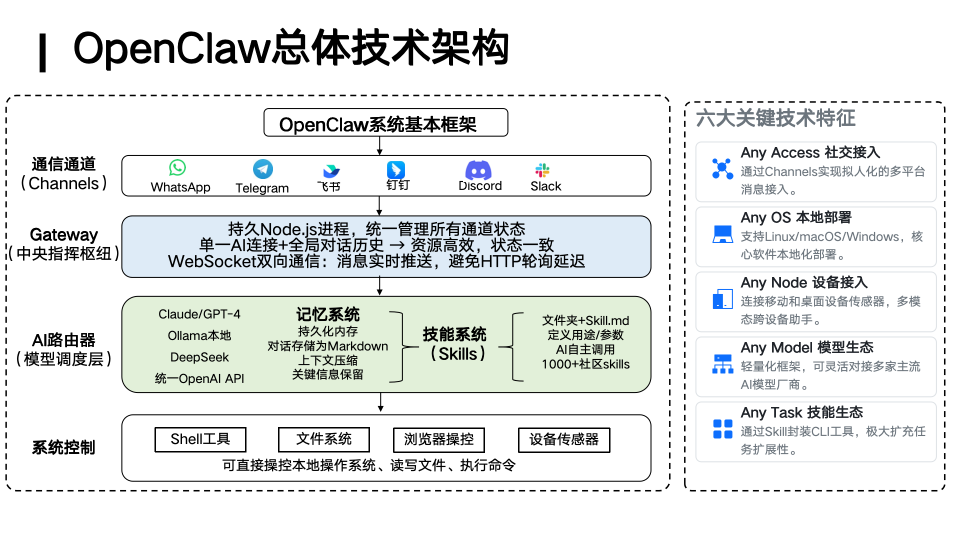
从工程层面看,OpenClaw的总体技术架构清晰,从底层的系统控制、AI路由器,到上层的Agent循环、通信通道。其成功可归结为六大关键技术特征:Any Access(社交接入)、Any OS(本地部署)、Any Node(设备接入)、Any Model(模型生态)、Any Task(技能生态)。这些特征使其对底层模型、用户设备和复杂任务具备了极强的兼容性。
林衍凯教授重点剖析了其三大核心设计:
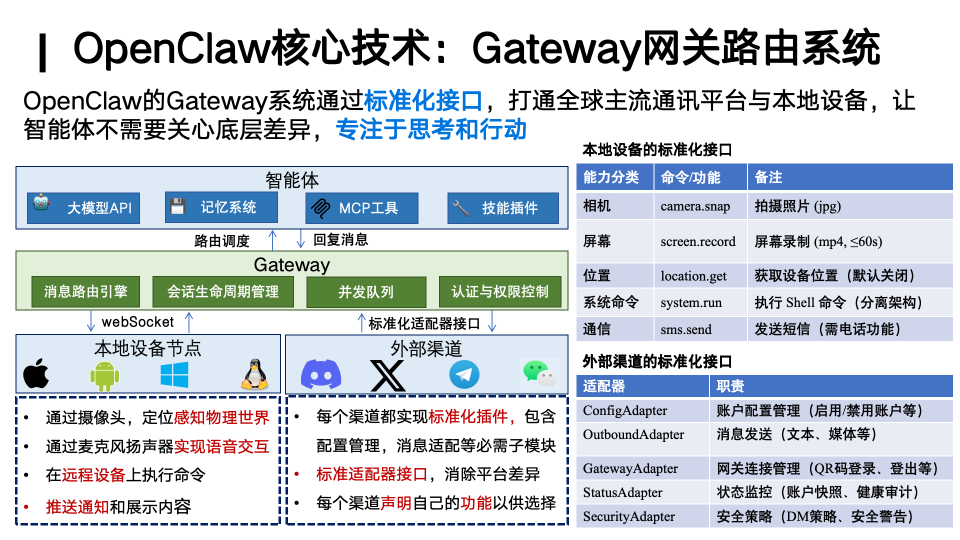
1. Gateway网关路由系统
Gateway采用了分层架构,统一路由和调度来自不同IM软件或设备的消息。这使得智能体本身无需关心用户来自哪个平台或使用何种硬件,只需专注于与底层API和顶层接口的对接,实现了资源的高效利用和状态的一致性。
2. 智能分层记忆系统
OpenClaw设计了一个简单但实用的四层记忆机制:
- L1 会话上下文层:短期记忆,会话结束即消失。
- L2 每日笔记层:记录每日流水账,有30天的衰减周期。
- L3 长期记忆层:提炼人物信息、偏好和经验教训。
- L4 语义搜索层:基于文件的混合检索(向量+关键词),实现智能召回。
这套基于Markdown的透明记忆架构,旨在让智能体“越用越懂你”。

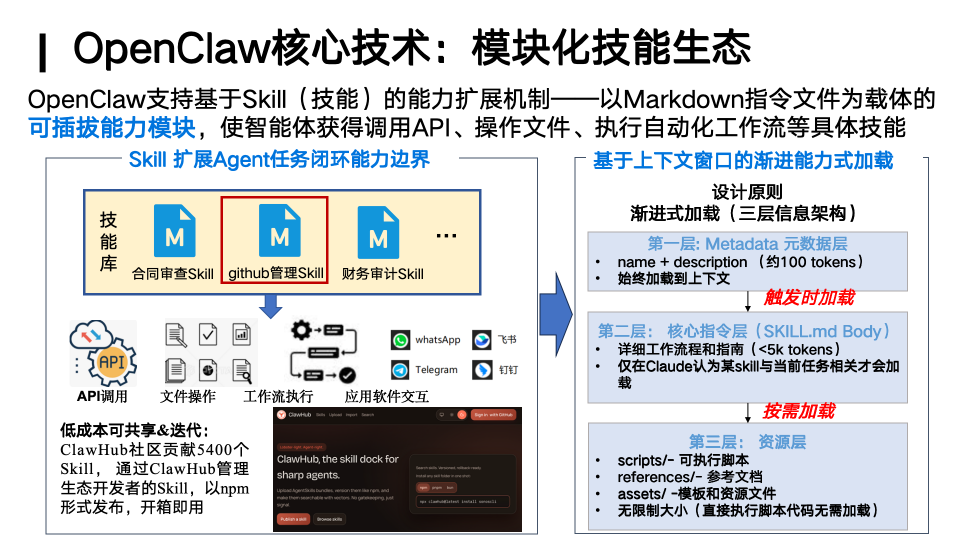
3. 模块化Skill生态
Skill生态采用了渐进式加载的三层设计:
- 元数据层:Skill的名称和描述(约100 tokens),始终加载用于快速检索。
- 核心指令层:详细的工作流程指南(<5k tokens),仅在任务相关时按需加载。
- 资源层:脚本、文档、模板等,无需加载到上下文,直接执行。
这种方式极大地扩充了智能体处理专精任务的能力边界。
基于以上分析,林衍凯提出了一个关键判断:OpenClaw不应仅仅被看作一款应用,而应被视为未来智能体操作系统的早期原型。 正如Linux让所有硬件在统一标准下运行,OpenClaw试图让所有AI模型、消息平台和工具在统一标准下运行。
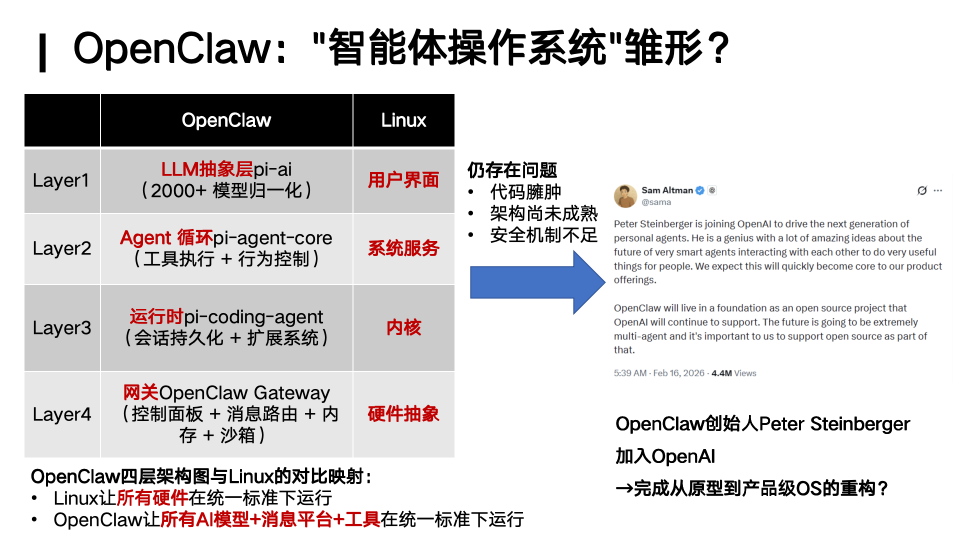
然而,目前的OpenClaw代码已显臃肿,架构尚未成熟,其创始人加入OpenAI,或许正是希望借助大公司的力量完成从原型到产品级OS的重构。更重要的是,当前它只解决了“单机单Agent”的问题,未来分布式环境下数百个Agent的协同工作,需要线程管理、服务发现、行为审计等更复杂的操作系统级功能。
这也引出了生态竞争的核心。林衍凯指出,未来的模型、工具和应用必须主动适配这样的框架或协议,就像移动应用必须适配iOS和安卓一样。模型竞争的维度必须从“跑分高”转向“用起来好”,工具使用、结构化输出、长上下文等能力正从加分项变为硬性要求。
生态竞争与核心瓶颈
当前,智能体生态的竞争已在多个层面展开。
在框架与协议层面,主要存在三条路线:
- OpenClaw路线:主打开源、本地优先、IM驱动,生态开放但安全问题突出。
- Claude Code路线:通过CLI运行,深度集成MCP协议,偏向开发者,在编码领域优势明显。
- OpenAI路线:能力直接集成于ChatGPT,触达广大消费者。
同时,MCP、A2A、IOA等协议之争,也关乎未来生态的话语权。

在交互执行层面,则存在两条路径的探索:
- 工具调用:通过API、CLI、MCP协议直接调用,可靠、快速,但现有软件API覆盖率不足。
- GUI操作:像人一样看屏幕点击(如豆包AI手机),通用性强但速度慢、耗资源、准确性不稳定。
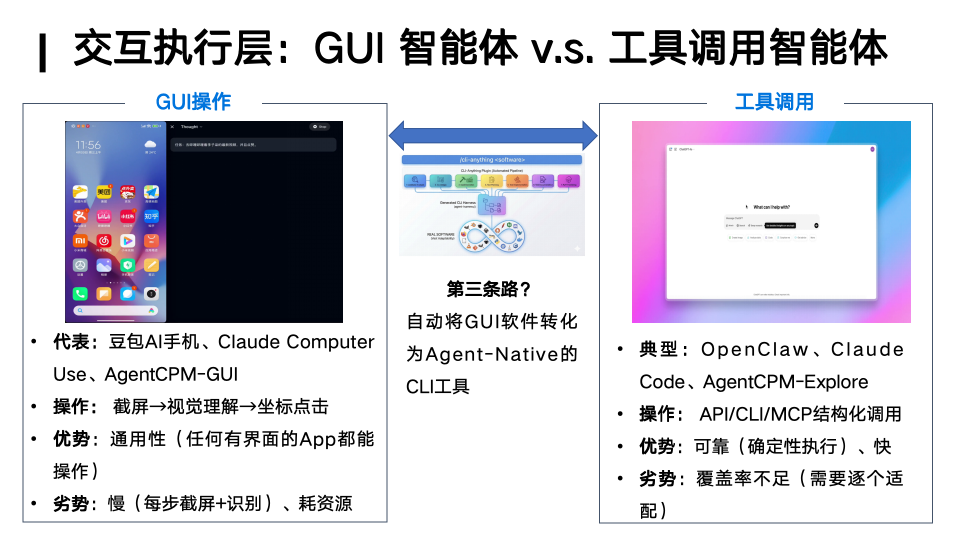
林衍凯判断,OpenClaw等产品的流行,正在倒逼传统软件向“AI原生(Agent-Native)”设计演进。短期内两条路线会共存,长期看,随着更多软件被自动转化为Agent-Native接口(如港大的CLI-Anything项目),工具调用的覆盖率将持续上升。
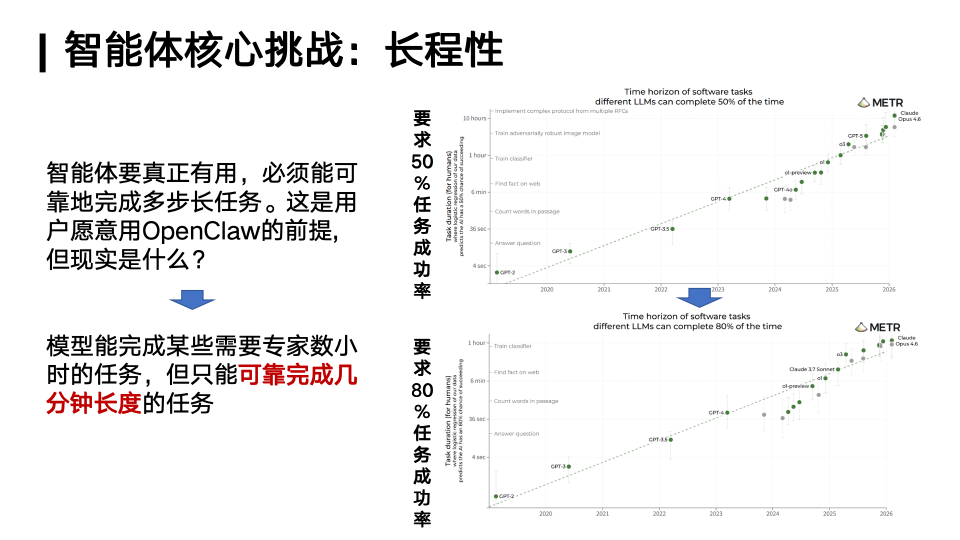
直面瓶颈:长程性、成本与记忆
智能体要真正落地,必须可靠地完成多步长任务。数据显示,在要求50%成功率时,顶级模型如Claude Opus 4.6能处理长达10小时的任务;但将可靠性要求提高到80%以上(商用底线),其能可靠完成的任务时长会骤降至1小时左右。
纯端侧路线短期难通,端云协同成为必然选择。 纯云端则面临Token成本的巨大压力。OpenClaw单周消耗4.73T Token,若用户量增长十倍、百倍,现有基础设施难以承受。一个可行的路径是:由云端大模型进行任务规划与分解,将长任务拆解为几分钟内的子任务,交给端侧小模型执行,再由云端验证结果。
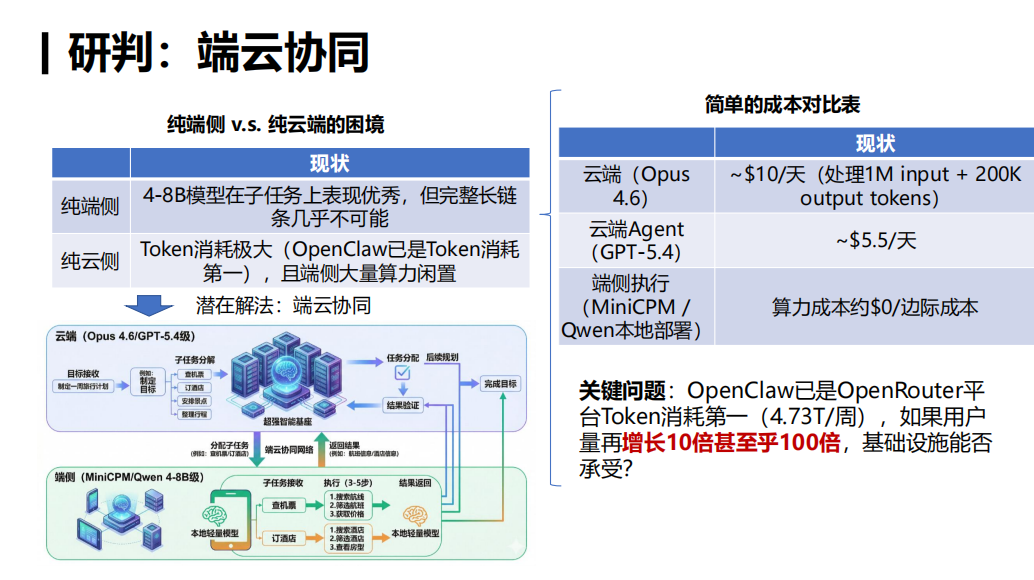
这并非空想。专业智能体(如Claude Code已贡献GitHub上4%的提交)证明了“通用大模型+领域知识+MCP工具+专业Skill工作流”公式的有效性。端侧模型在特定垂直场景下已能达到与云端大模型相近的效果。随着模型能力按“密度法则”快速进化,端侧能处理的任务会越来越多。
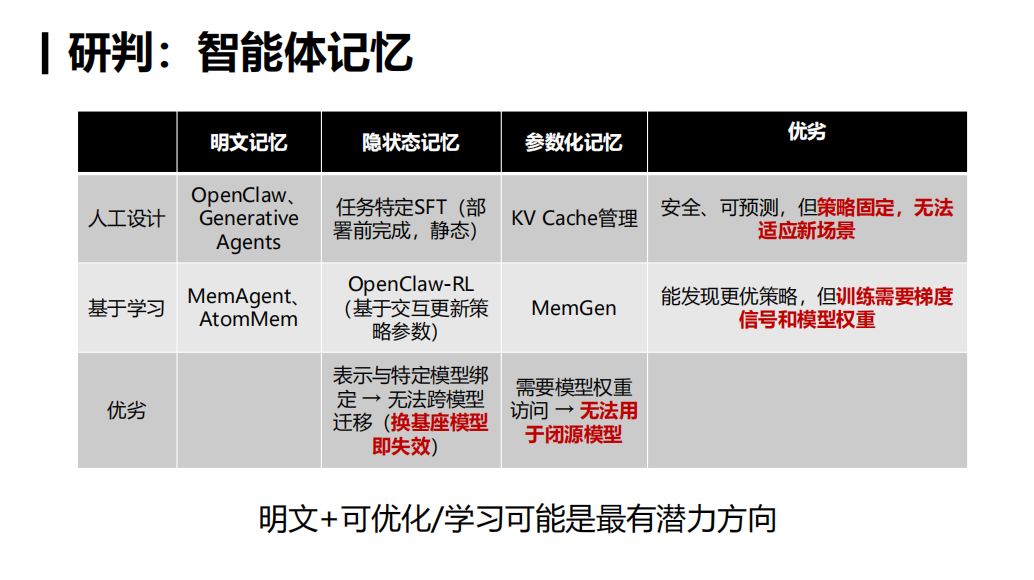
记忆系统是另一大关键瓶颈。 目前的记忆方案多样,有人工设计的明文记忆(如OpenClaw),也有基于学习的隐状态或参数化记忆,各有优劣。人工设计的安全可预测但策略固定;基于学习的能发现更优策略但需要模型权重可访问。对于未来端云协同、记忆大规模复用的需求,“可迁移的明文记忆+可优化/学习机制”可能是最有潜力的方向。
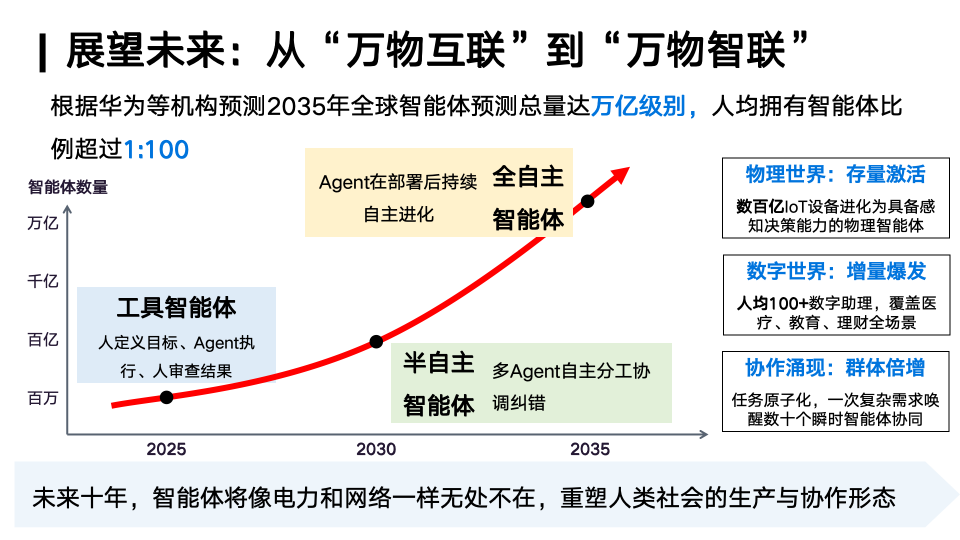
展望未来:从工具到自主进化
当前的智能体尚属“工具阶段”,由人定义目标并审查结果。下一阶段将走向“半自主协作”,多个Agent能进行自主分工、协调与纠错,协作的Scaling Law可以被预测和利用。最终阶段是“全自主进化”,万亿级别的Agent在部署后能持续自主学习与进化。
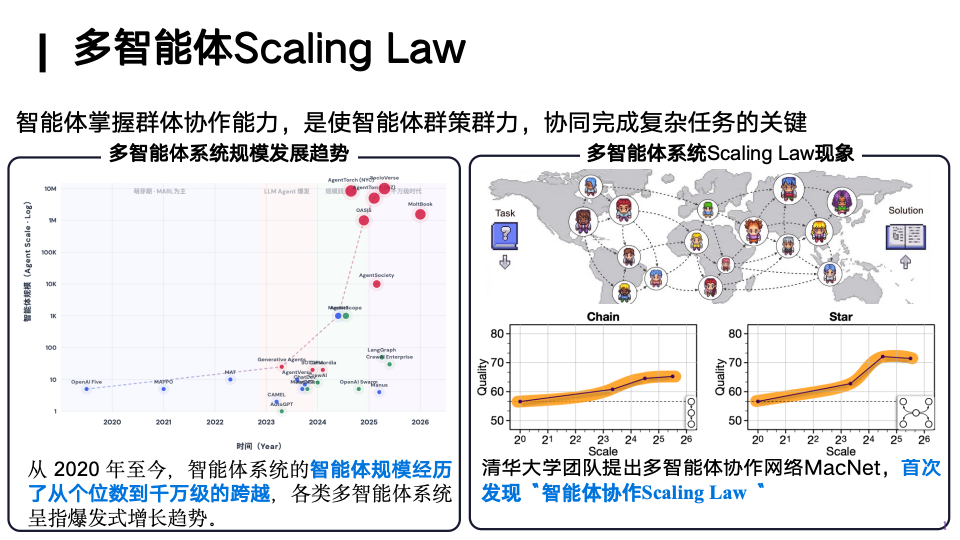
多智能体系统的发展令人瞩目,规模已从个位数跨越到百万级。清华团队的MacNet首次发现了智能体协作的Scaling Law。然而,林衍凯也指出,像Moltbook那样150万Agent的“广播式”讨论,并非真正的群体智能涌现。真正的涌现需要Agent之间产生有意义的分工、冲突与适应性协调,以完成单个Agent无法企及的复杂任务,距离真正的“智能体互联网”尚有长路。
在自主进化方面,已有初步探索,如Princeton的OpenClaw-RL项目尝试在端侧进行强化学习式的策略更新。但这仍面临GPU需求大、无法应用于闭源模型、数据孤岛等明显局限。真正的AI自主进化距离实际应用还有相当长的路要走。
总结
OpenClaw本身或许不是颠覆性的技术突破,但它无疑是技术到达临界点的一个重要标志。它通过卓越的工程整合,将大模型的智能体能力推向了可用的前沿,勾勒出智能体操作系统的雏形。同时,它也集中暴露了当前技术在长程任务可靠性、Token成本、记忆系统迁移和自主进化等方面的核心瓶颈。
从端云协同、记忆架构、协议标准到多智能体涌现,每一个层面都蕴含着深刻的研究空间与产业机会。我们正处在智能体技术从“演示可行”迈向“大规模部署”的关键转折期。对于开发者和研究者而言,理解这些趋势与瓶颈,或许比追赶下一个热点更为重要。欢迎在云栈社区交流,探讨更多前沿技术趋势。
 发表于 2026-3-31 05:25:44
|
查看: 124|
回复: 0
发表于 2026-3-31 05:25:44
|
查看: 124|
回复: 0
