从4G到5G,正交频分复用(OFDM, Orthogonal Frequency Division Multiplexing) 技术一直是移动通信的基石。然而,面向6G的愿景——支持时速500公里的高铁、低空无人机乃至低轨卫星——带来了前所未有的挑战:高速移动下的多普勒效应会严重破坏OFDM子载波间的正交性,导致载波间干扰(ICI, Inter-Carrier Interference) 加剧,通信性能急剧下降。
既然国际标准组织3GPP已确定OFDM为6G的基线波形,那是否意味着我们对此束手无策?并非如此。来自意大利帕维亚大学等机构的研究人员在2026年3月发表的一篇论文中,提出了一个极具工程智慧的解决方案:换挡OFDM(GS-OFDM, Gear-Switching OFDM) 框架。这个框架就像给通信系统装上了一台“自动变速箱”,能够根据终端用户的实时移动速度,在三种不同复杂度的信号处理“档位”间自动切换,从而优雅地平衡向后兼容性、计算复杂度和通信可靠性。
为什么需要“换挡”?信道相干时间的量化分析
问题的根源在于无线信道的快速时变特性。车速越快,多普勒频展越大,信道的相干时间(即信道特性基本保持不变的时间)就越短。论文通过详尽的量化分析,揭示了单一固定处理策略的局限性。
下表计算了在不同系统配置下,面对从步行到极端高速的各种场景时,信道在一个OFDM符号周期内仍能保持“基本不变”的相干符号数量。颜色标识了信道状态:绿色(低移动性)、黄色(中移动性)、红色(高移动性)。

解读这张表格可以得出几个关键结论:
- 最脆弱的场景:车联网(C-V2X, 5.9GHz)。在120km/h时相干符号数已降至11(中移动性),到了350km/h的高铁场景更是降至3(高移动性),传统OFDM在此几乎失效。
- 高频段的优势:尽管FR2(28GHz)和太赫兹(140GHz)频段传播损耗大,但其使用的子载波间隔(SCS)非常大(120kHz, 480kHz),使得OFDM符号持续时间极短。因此,在较高速度下(如120km/h),信道状态在一个符号周期内变化不大,反而能保持在低移动性区域。
分析结果清晰地表明:没有一种固定的信号处理策略能通吃从静止到超高速的全部场景。在低速区使用复杂处理是算力浪费,在高速区使用简单处理则会导致通信失败。一个能根据实时多普勒条件自动切换的自适应机制,不仅是合理的,更是必需的。

GS-OFDM三档变速:自适应应对不同移动场景
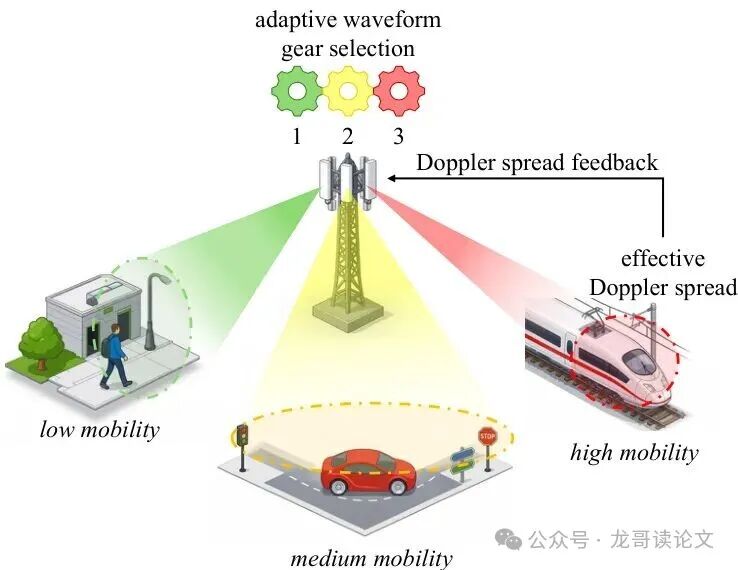
GS-OFDM框架的核心思想是模拟自动变速箱的工作流程:
- 感知:终端设备(UE)测量下行信道的多普勒频展并反馈给基站(BS)。
- 决策:基站根据预设阈值,将移动状态相似的用户分组,并为每组选择最合适的处理档位。
- 执行:基站通知用户所用档位,双方切换到对应的收发模式进行处理。
那么,这三个档位具体有何不同?关键在于它们如何看待和处理信道。
档位1:传统OFDM(经济档)
- 适用场景:低移动性,信道准静态。
- 工作原理:完全沿用5G NR标准。使用时-频域导频进行信道估计和单抽头频域均衡。
- 特点:复杂度最低,延迟最小,与5G完全后向兼容。
档位2:延迟-多普勒辅助OFDM(运动档)
- 适用场景:中移动性,信道时变。
- 核心创新:引入延迟-多普勒(DD, Delay-Doppler)域的视角。在DD域中,由多径产生的信道呈现稀疏且准静态的特性(只有少数几条主要路径,其参数短时间内稳定),这比在快速变化的时-频域中处理更鲁棒。
- 工作原理:发射端仍发送标准OFDM信号。接收端利用时-频导频估计信道后,将其转换到DD域,识别出主要路径的参数(延迟、多普勒、增益),进而重构出完整的时-频信道进行高级均衡。
- 特点:接收机复杂度增加,但发射端几乎无需改动,保持了高后向兼容性。
档位3:双域波形OFDM(性能档)
- 适用场景:高/极端移动性。
- 工作原理:最激进的一档。发射端在数据上叠加一个精心设计、铺满整个时频资源的DD域导频。接收端利用此丰富导频直接在DD域进行高精度信道参数估计。
- 关键权衡:导频-数据功率比(PDR, Pilot-to-Data Ratio)。更高的PDR带来更准的信道估计,但会挤占数据功率,影响解调信噪比。
- 特点:抗高速能力最强,但终端需开启更宽的射频通道以接收宽带DD导频,能耗大增,且与现有标准兼容性最差。

性能实测:自适应换挡的价值验证
理论需要实践检验。论文通过仿真,在一个典型的C-V2X场景下,对比了三种档位的吞吐量性能。
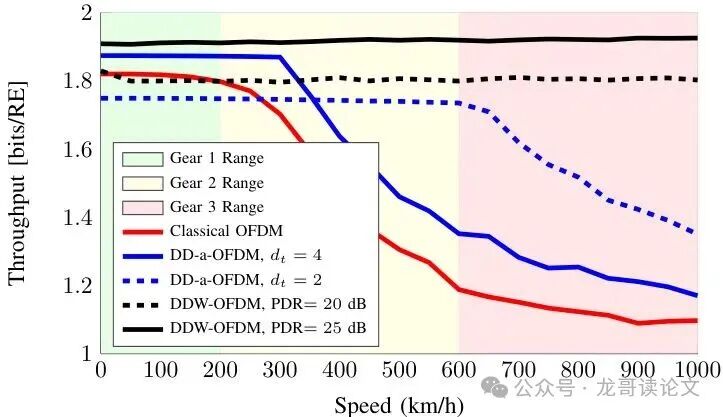
从图2可以清晰看到:
- 档位1:在低速区(<200 km/h)吞吐量最高,但速度超过200km/h后性能断崖式下跌。
- 档位2:在中速区域(200-600 km/h)成功接棒,通过DD域处理显著扩展了可靠通信的速度范围。
- 档位3:在高速区域(>600 km/h)成为唯一可行的选择,提供了无视速度变化的、近乎恒定的可靠性能平台。
仿真完美印证了“自适应换挡”的理念:没有全能模式,但通过智能切换,可以确保在整个速度范围内都能获得当下最优或可接受的性能。
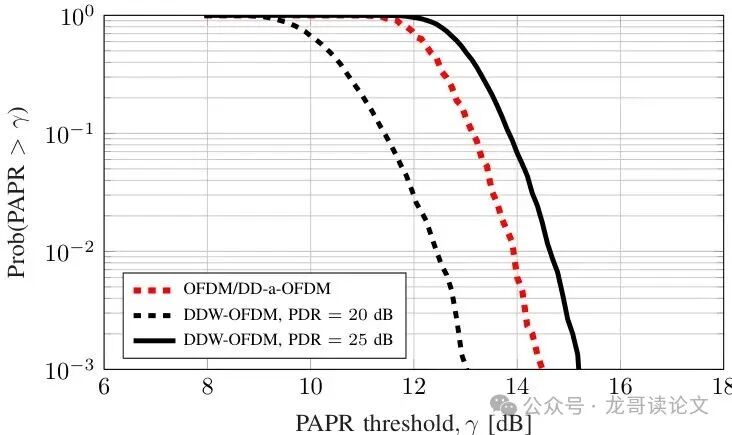
此外,论文还分析了峰均功率比(PAPR, Peak-to-Average Power Ratio) 特性。如图3所示,档位3的PAPR可以通过PDR参数进行调节,这为系统设计提供了额外的灵活性。
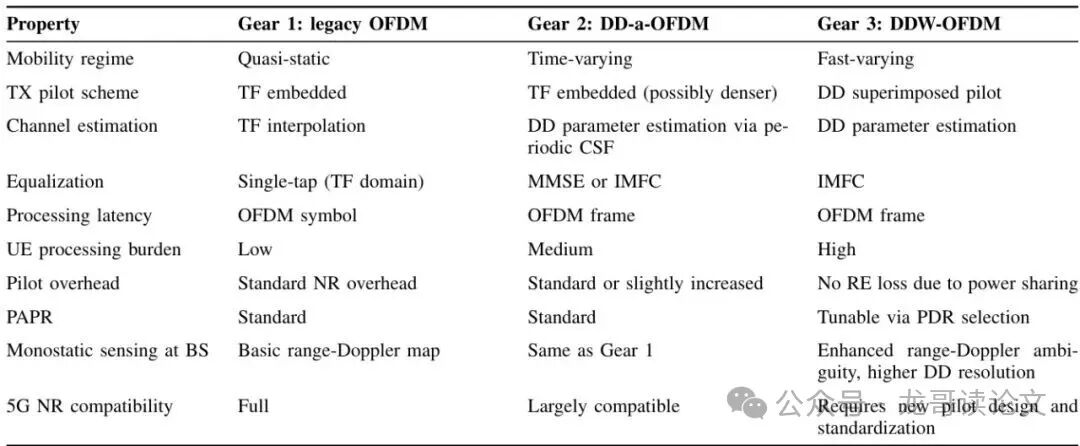
最后,通过下面的总结表格,可以一目了然地对比三个档位的核心特性。
机遇、挑战与未来展望
GS-OFDM框架的意义超越了单纯的通信优化,它与6G的另外两大主题——大规模MIMO和通感一体化(ISAC)——产生了深度互动。
- 与MIMO的协同:大规模MIMO的窄波束具有空间滤波作用,能减少终端感知到的有效多普勒频展,从而让系统更长时间停留在低复杂度的档位1。
- 赋能ISAC:档位3所使用的DD域叠加导频,其设计理念与雷达信号相通,天然具备优异的距离-多普勒分辨能力。这意味着在服务高速用户的同时,基站也能成为一个高性能的感知节点。
当然,挑战也随之而来:
- 能耗难题:档位3要求终端持续进行宽带接收和复杂处理,对续航是严峻考验。
- 用户公平性:基站需将移动状态相似的用户分簇。如何平衡簇内快、慢用户之间的性能与能耗公平,需要更智能的调度算法。
- 上行链路设计:本文重点讨论下行。上行链路是否采用对称的档位设计,特别是手机有限的发射功率如何支持档位3的宽带导频,仍是开放问题。
总体而言,GS-OFDM代表了一种务实的6G设计哲学:在不颠覆OFDM基线的前提下,通过引入软件和算法层面的智能自适应,来弥补其物理缺陷。这种“框架内增强”的思路,平滑了从5G到6G的演进路径。
展望未来,GS-OFDM的成熟可能沿着几个方向推进:与网络智能结合实现预测式换挡;推动档位3所需的新导频设计进入3GPP标准;以及最终在基带芯片层面获得灵活可配置的硬件支持。它或许就是未来保障我们在极速交通工具上依然能享受流畅沉浸式体验的关键技术之一。
对延迟-多普勒域通信、高移动性信号处理等底层通信技术感兴趣的朋友,欢迎在云栈社区的相关板块进行更深度的交流和探讨。
 发表于 2026-4-5 00:09:57
|
查看: 169|
回复: 0
发表于 2026-4-5 00:09:57
|
查看: 169|
回复: 0
