作为一门跨学科的前沿领域,具身智能整体仍处在发展的初期阶段。以AI大模型和传统控制理论为代表的两大学科正加速碰撞融合,而行业发展的核心议题也日益聚焦:如何构建具身大模型,在动作层实现一个真正通用的控制器?这一核心挑战,直接导致了当前技术路线多元探索与深层结构性困难并存的复杂局面。
技术路线仍在探索,工程化挑战浮现
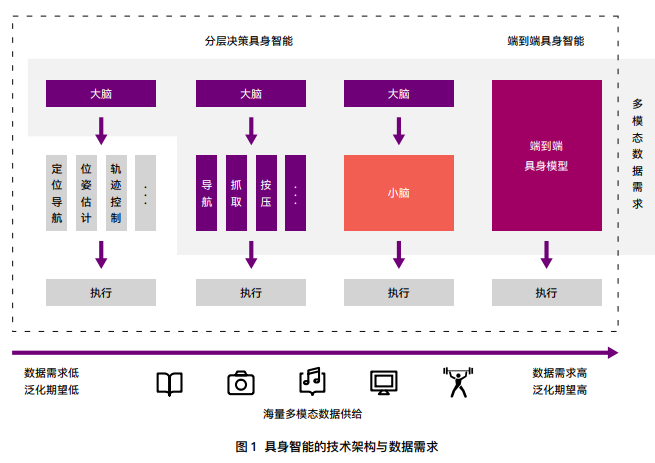
语言大模型的突破,为具身智能提供了强大的任务理解与规划能力。然而,在更为底层的动作控制层级,具身大模型的具体实现路线和架构仍在经历着广泛的尝试与验证。目前,行业主流的探索方向是端到端的VLA模型路线,其能力正在持续的优化与提升中。
除了算法模型的选择,一系列工程化问题也正逐渐凸显。例如,传统上机器人“大脑”(规划)与“小脑”(控制)分离的设计,常常导致协同延迟;而尝试将两者融合的方案,又面临着算力分配与实时性保障的严峻工程挑战。在硬件层面,电机发热、磨损带来的性能衰减,以及感知精度、驱动能力与灵巧操作上的综合差距,都意味着仍有大量的科研与产业资源需要投入。
数据瓶颈:成本高昂与标注难题
如果说算法是大脑,那么数据就是至关重要的“经验”来源。但与互联网上海量的文本、图像数据不同,具身大模型严重依赖于特定机器人的操作数据——包括真实本体的执行记录、模拟器生成数据等,并且往往需要精细的标注。这导致数据采集成本呈指数级上升。
同时,具身智能系统的高度复杂性,使得算法与硬件紧密耦合,不同来源、不同格式的异构数据难以互通,这已成为制约技术规模化发展的核心瓶颈之一。尤其是在要求精细物理交互的灵巧操作领域,现有末端执行器在灵活性、触觉感知和稳定性上远逊于人手,进一步限制了高质量数据的获取。
行业内有观点认为,要实现具身智能能力的“涌现”,可能需要百万小时级别的真实世界物理交互数据。而目前积累的数据量,据估算可能还不到需求的5%。可用数据的严重短缺,加之数据采集与使用方法尚未形成共识,都让前进之路充满挑战。此外,领域内缺乏统一、公认的能力评估基准,也让不同技术路径的性能对比缺乏科学依据,阻碍了研究进展的清晰度量。
商业化前夜:成本、场景与商业模式的挑战
尽管长期潜力巨大,但具身智能在短期内仍面临着成本高企、适用场景有限、投资回报周期不明朗的现实压力。
首当其冲的是硬件成本。核心零部件如六维力传感器、谐波减速器、高性能电机等价格昂贵,且供应链成熟度有待提升。产业生态的不成熟直接导致各环节缺乏统一标准,定制化程度高,难以通过规模化摊薄成本。
其次,当前机器人在动态、非结构化的真实环境下的操作精度、响应速度和长期可靠性,距离大规模商业化应用仍有明显差距。同时,商业模式也相对单一,产业收入主要依赖硬件销售,基于服务的增值收入占比较低,行业的商业化创新速度似乎略慢于其技术发展的步伐。
数据视角:贯穿始终的系统性工程
发展具身智能是一项融合了算法、硬件、数据和系统的庞大工程。而数据,无疑是串联起所有这些环节的真实枢纽。从数据的视角出发,我们不仅能观察到不同技术路线在数据需求与处理能力上的收敛或分化,追踪数据成本的变化趋势,更能有效甄别不同应用场景的实际价值,为投资与商业决策提供一个坚实的现实锚点。
因此,理解数据的不同采集路径,研究其使用方式,是探究行业最底层驱动力和最现实制约因素的关键。下图展示了一个典型的具身智能数据金字塔结构,清晰地揭示了数据精度、成本与类型之间的复杂关系。
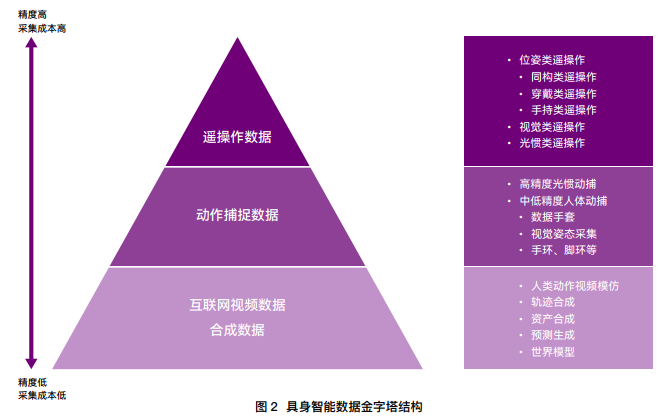
从低成本的互联网视频与合成数据,到高精度的遥操作数据,每一层都对应着不同的技术实现路径与能力天花板。如何高效地利用和融合这些不同层次的数据,构建更强大的具身智能模型,将是未来一段时间内学术界和产业界共同攻坚的重点。对于技术从业者和爱好者而言,持续关注这些底层数据逻辑的演进,或许比追逐表面的技术热点更有价值。欢迎在云栈社区交流你的见解与发现。 |  发表于 2026-4-5 09:40:21
|
查看: 135|
回复: 0
发表于 2026-4-5 09:40:21
|
查看: 135|
回复: 0
