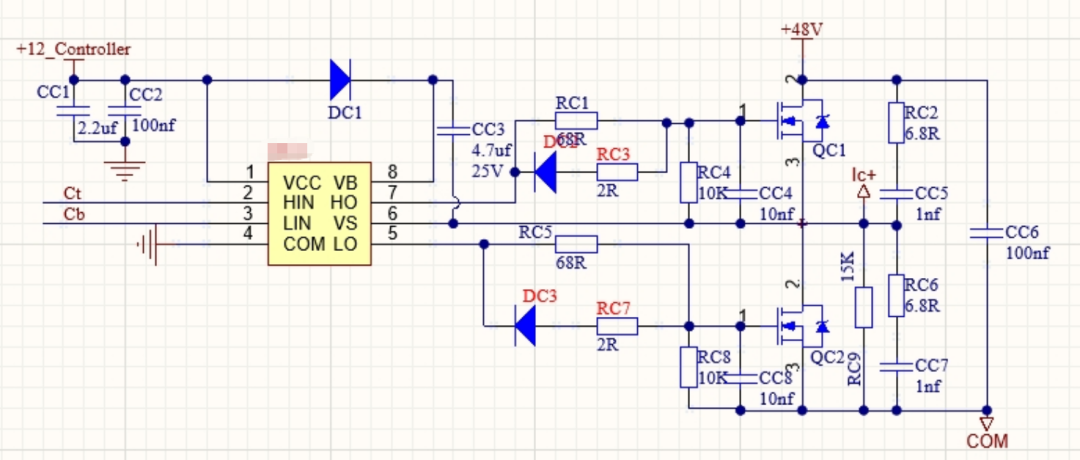
在BLDC(无刷直流电机)驱动电路设计中,你是否留意过这样一个细节:A、B、C三相的相线节点,常常会各自通过一个几十千欧(kΩ)的电阻连接到地(GND)。这个看似简单的设计,在无感方波控制方案中,却是至关重要、不可或缺的一环。它的核心目的非常明确:为反电动势(BEMF)的过零检测提供一个稳定可靠的电位基准,同时兼顾电路安全与抗干扰能力。
一、核心目的:解决无感控制的“相端浮空”难题
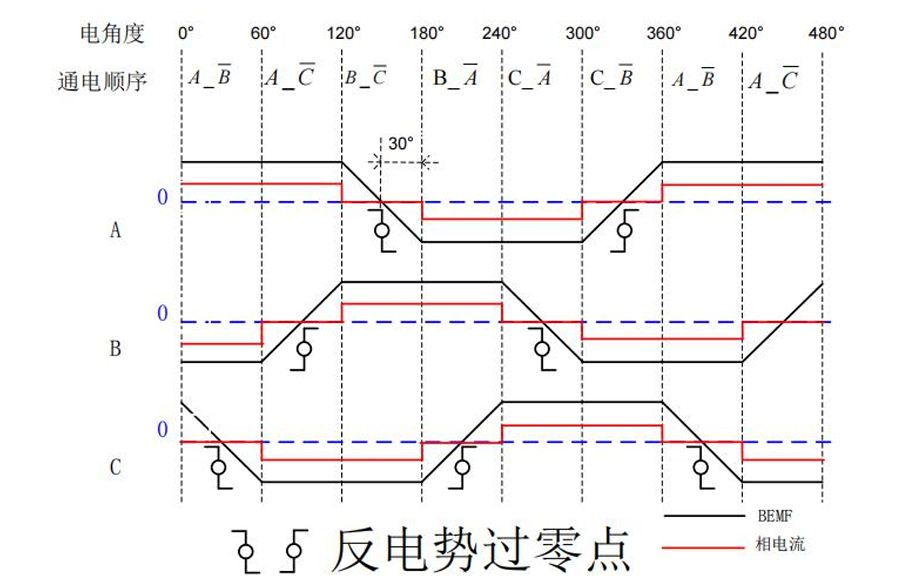
无感BLDC控制,不依赖霍尔传感器,而是通过检测三相反电动势的过零点来推断转子位置,从而进行换相。这里存在一个根本性问题:
- 当电机处于静止、低速运行状态,或者驱动桥的上、下桥MOS管全部关断时,三相的相线端子在电气上是完全浮空的高阻态。
- 浮空的端子电压会受到各种寄生参数和噪声的影响,随机漂移,导致后级的比较器电路根本无法从杂乱的信号中识别出真实的BEMF过零时刻。
- 接入一个15kΩ(典型值)到GND的下拉电阻后,相当于为浮空的相端强制建立了一个固定的直流参考电位(0V)。这样,电机旋转产生的BEMF信号就能以GND为基准进行正负波动,比较器才能准确地捕捉到电压穿越零点的时刻。
可以说,如果没有这组下拉电阻,采用反电动势过零检测的无感电机很可能无法正常启动,或者在运行中出现乱抖、丢步甚至完全失控的情况。
二、次要但不可忽视的作用
除了提供检测基准,这组下拉电阻还扮演着几个重要的“配角”:
- 防止电磁干扰误触发:浮空的相线极易受到PWM开关噪声、电机换向产生的电压尖峰以及空间电磁干扰(EMI)的影响。下拉电阻可以泄放掉这些干扰电荷,稳定相端电位,有效避免比较器产生误判,提升系统鲁棒性。
- 避免负压或尖峰损坏芯片:在电机快速换向过程中,可能会产生反向的感应电压,对连接到相端的MCU比较器或ADC引脚造成负压冲击。下拉电阻能起到一定的钳位和泄放作用,保护敏感的控制芯片。
- 确保上电初始化电位明确:系统上电瞬间,驱动桥MOS管通常处于关断状态,三相端子电位未知。下拉电阻能确保它们在初始时刻被拉至0V,防止因电位随机导致电机在上电瞬间产生意外的抖动。
三、阻值为何选“几十kΩ”?一个平衡的艺术
这个电阻的阻值选择颇有讲究,是多项因素权衡后的结果:
- 阻值太小(例如几Ω到几百Ω):会形成低阻抗通路,带来不必要的静态功耗,同时会严重拉低BEMF信号的幅值,导致过零检测失效。
- 阻值太大(例如几MΩ):则相端依然近似于浮空状态,无法起到稳定电位的核心作用。
- 几十kΩ(如15kΩ, 47kΩ):这个范围是业界经过实践验证的通用值。它在功耗、检测信号幅度(精度)以及抗干扰能力三者之间取得了最佳平衡。阻值足够小以稳定电位,又足够大以避免消耗过多功率和衰减信号。
四、关键区分:有感与无感方案
这里有一个重要的设计区分点:
- 有感BLDC(使用霍尔传感器):转子位置由霍尔元件直接检测,不依赖相端电压信息。因此,三相下拉电阻不是必须的,相端浮空不影响系统工作。
- 无感BLDC(依赖BEMF过零检测):这组下拉电阻是必须添加的,否则核心的位置检测功能将无法实现,电机无法正常运行。
拓展讨论:关于预驱电路回流路径的说法
在技术社区,例如云栈社区的硬件板块,也有工程师提出另一种观点:该电阻在BLDC预驱芯片刚上电时,能为内部电路提供必要的回流路径,确保其正常初始化。这种说法侧重于芯片本身的工作条件。实际上,它的“稳定基准”作用与“提供路径”作用并不矛盾,往往是同时存在的。电路中的许多经典设计,正是这种一石多鸟的智慧体现。 |  发表于 2026-4-23 00:28:05
|
查看: 253|
回复: 0
发表于 2026-4-23 00:28:05
|
查看: 253|
回复: 0
