不少人觉得,只要接个大语言模型(LLM)的 API,再套个铝合金外壳,机器人就能像科幻电影里一样端茶倒水、包揽家务。如果你也这么想,那多半低估了物理世界的复杂程度。
过去一年,人形机器人赛道挤满了估值百亿的网红。通常做法是:找个干净无干扰的实验室,拍 100 次动作,再剪出一个完美的 5 分钟短视频。可一旦拉到真实工厂里,光照一变、来料稍微偏个几毫米,机器人直接原地死机。
行业被这种“Demo 驱动”的风气遮蔽太久了。
直到最近,我深度盘了盘智元机器人(Agibot)刚搞完的 AI 发布周。他们没有发任何炫技的精剪短片,而是用连续 6 天的时间,硬核拆解了自家的底层技术,最后外加一场 8 小时的真实产线实况直播。
看完之后深感:单纯的大模型只是“脑”,想让机器人真正下地干活,缺的是一整套深不可测的“物理 AI 基础设施”。今天,咱们就来看看智元这 6 天到底打出了一套什么王炸技术。
一:机器人的“肌肉记忆”,不是靠全网文本脑补出来的
为什么大模型一进物理世界就抓瞎?因为 LLM 吃的语料是全网的文字和图片,但物理世界里杯子的重量、桌面的摩擦力、齿轮的阻力,网上根本搜不到。没有真实世界的物理数据,机器人就像一个高位截瘫的哲学家。
为了给机器人“喂饭”,智元在 Day 1 和 Day 2 亮出了两把刷子:真机数据集 + 超级仿真场。
在 Day 1 的资料中,我看到了他们开源的百万级数据集(AGIBOT WORLD 2026)。这可不是糊弄事的虚拟数据,而是采集员戴着 VR 设备,远程“灵魂附体”到机器人身上,在真实的超市、厨房里干活留下的记录。

除了视觉,这些数据里还包含了极为珍贵的 触觉、力控反馈和全身关节状态。这其实就是在给机器人重塑真实世界的“肌肉记忆”。
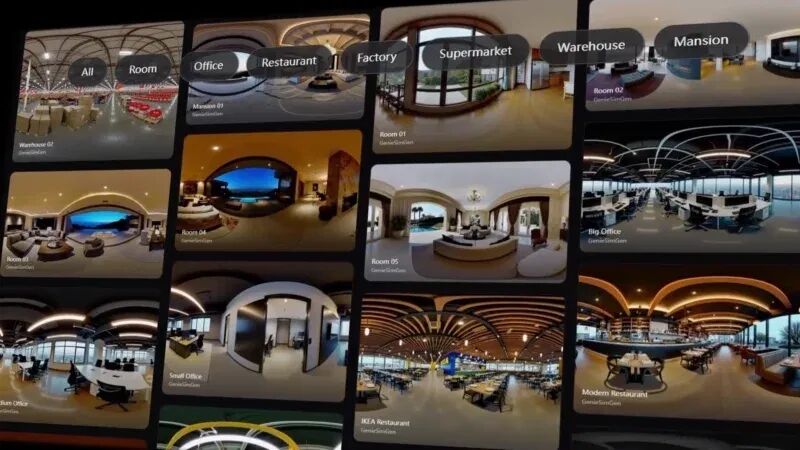
那如果现实里试错成本太高、采集太慢怎么办?智元在 Day 2 抛出了 Genie Sim 3.0 仿真平台。最让我震撼的是它“言出法随”的能力:只要输入一句话或一张图,大模型能在几分钟内直接“生成”一个 1:1 的 3D 训练场。在这个物理模拟频率高达 1000Hz 的“黑客帝国”里,机器人一天能跑完现实中几年的训练量。
二:“脑子懂了手却废了”?一招治好机器人的小儿麻痹
解决了数据,下一个致命痛点是“语义-运动鸿沟”。通俗点说,机器人脑子里清晰地知道“我要去拿那个红色的苹果”,但指令下达到机械臂时,手一抖就把苹果捏烂了。想得很美,干得稀碎。
智元在 Day 3(GO-2 基座模型) 和 Day 4(GE-Sim 2.0 世界模型) 给出了极其惊艳的解法。翻看 Day 3 的架构图时,我发现 GO-2 引入了一个非常有意思的机制:动作思维链(Action-CoT)与异步双系统。

这是什么意思?它在模仿人类的神经系统!干活前,它的“慢系统(大脑)”先在脑海里预演一遍动作路径;执行时,它的“快系统(小脑)”负责实时修正。比如发现桌子比预想的矮了 1 厘米,快系统会瞬间调整机械臂下探的幅度。这种“想清楚再动手、边干边纠偏”的能力,直接让 GO-2 在 LIBERO 这类行业极难的基准测试中,刷出了 98.5% 的平均成功率。
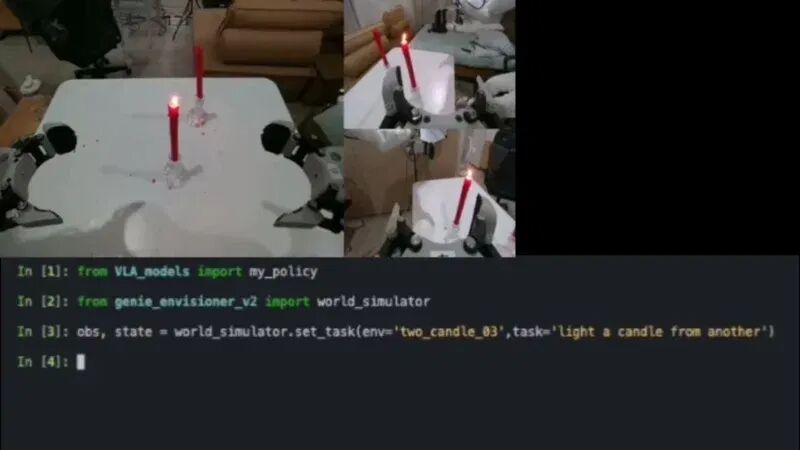
不仅如此,Day 4 发布的物理进化引擎更狠。世界模型不再只是“播放预测动画”,而是能真实反馈物理定律。机器人在这个“数字母体”里,可以通过强化学习自己推演、试错、自主进化——这才是通往 AGI(通用人工智能)的终极捷径。
三:估值百亿的网红,不如在流水线干满 8 小时的“牛马”
技术再牛,如果没法规模化落地,那也是白搭。现在很多企业不敢买机器人,是因为部署门槛太高:换个工位,就得请一堆年薪百万的算法博士重新写代码调参,试错成本极其高昂。
到了 Day 5,智元终于掏出了他们的杀手锏:Genie Studio Agent 零代码平台。
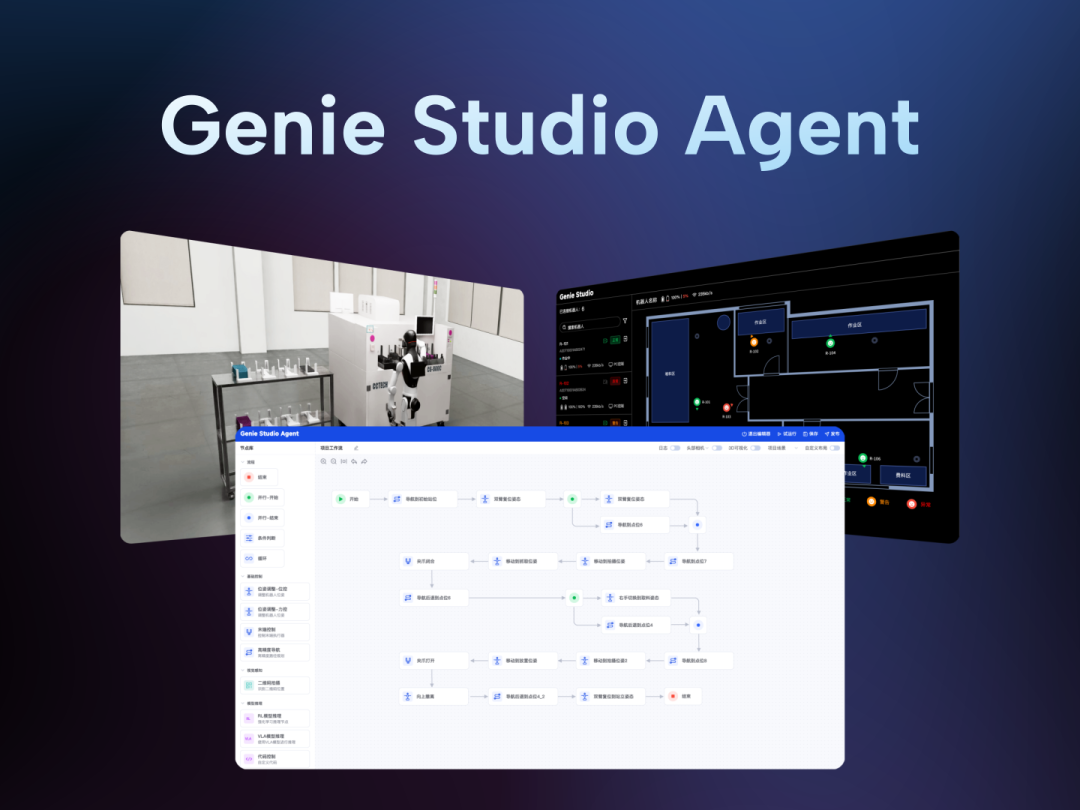
看完这个界面的演示,我拍案叫绝。不懂代码的产线师傅,可以像搭积木一样拖拽节点,半小时就能排好机器人的工作流。不仅如此,它还支持仿真先行:在机器人真实上产线前,先在 3D 虚拟世界里跑一圈,把撞机风险和节拍误差全部规避掉。
当然,所有的技术自嗨,都不如拉出来溜溜。所以有了 Day 6 极其残暴的一幕:拒绝 5 分钟剪辑 Demo,直接把精灵 G2 拉进龙旗科技真实的 3C 产线,连续干了 8 小时不间断实况直播。

在复杂多变、需要极高约束的真实工业现场,机器人没掉链子。这 8 小时的含金量,是对前面 5 天所有底层基建的终极阅兵。
总结:智元这盘棋,在给整个行业“立规矩”
看完这 6 天的内容,我最大的感受是:具身智能行业的竞争规则,被智元单方面改写了。当大家还在卷“谁的机器人后空翻更帅”、“谁接的大模型参数更大”时,智元却像个苦行僧一样,花大力气去修桥、铺路、建基础设施。
从真实数据(AGIBOT WORLD),到仿真引擎(Genie Sim),到基座大脑(GO-2),再到部署平台(Studio Agent),智元这 6 天拼出的,是一套让所有机器人都能稳定、廉价地“下地干活”的物理 AI 飞轮。
通用大模型并不是万能药。物理世界的每一寸进化,都是靠这种重工业式的积累打磨出来的。具身智能从实验室玩具走向千行百业生产力的元年,或许就是从这场连续 6 天的硬核发布开始的。
 发表于 2026-4-24 16:37:18
|
查看: 202|
回复: 0
发表于 2026-4-24 16:37:18
|
查看: 202|
回复: 0
