在智能车载与智能移动设备的视觉感知领域,360环视系统已成为消除视野盲区、提升运行安全性的核心配置,其性能表现直接依赖于底层硬件平台的算力与适配能力。基于实际项目需求,本文选择基于米尔电子MYD-LR3576开发板进行方案构建与评估。该开发板搭载的瑞芯微RK3576芯片,集成了4核Cortex-A72、4核Cortex-A53、Mali-G52 GPU及高达6TOPS算力的NPU。我们将从功能实现、实时性能与AI拓展潜力三大维度,提供该平台在360环视应用中的能力参考。
系统流程与功能实现
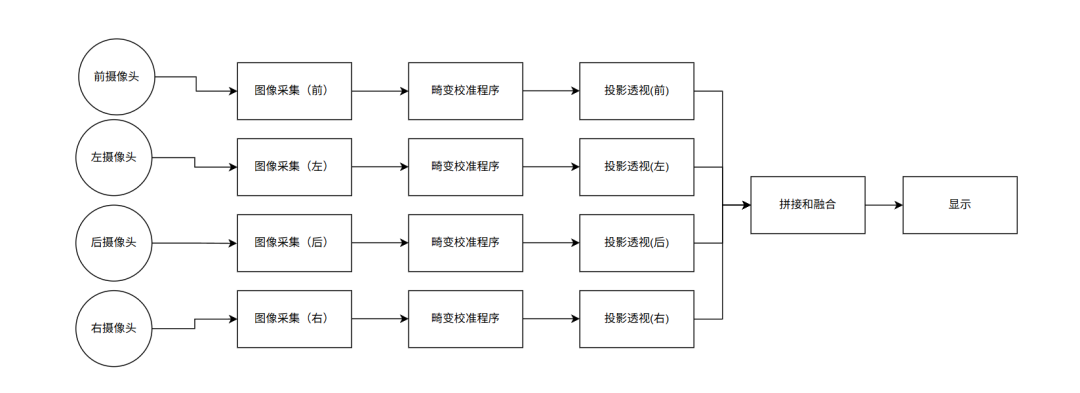
一套标准的360环视处理流水线已在开发板上成功部署,验证了其功能可行性:
- 传感器配置:使用4路720P分辨率鱼眼摄像头,精确固定于模拟车辆的四周。
- 核心处理流水线:
- 畸变矫正:利用张正友标定法预先获取摄像头内参和畸变系数,在嵌入式Linux系统上实时消除鱼眼镜头产生的图像扭曲。
- 投影变换:通过预设的单应性矩阵(Homography Matrix),将矫正后的透视图像转换为统一的俯瞰视角鸟瞰图。
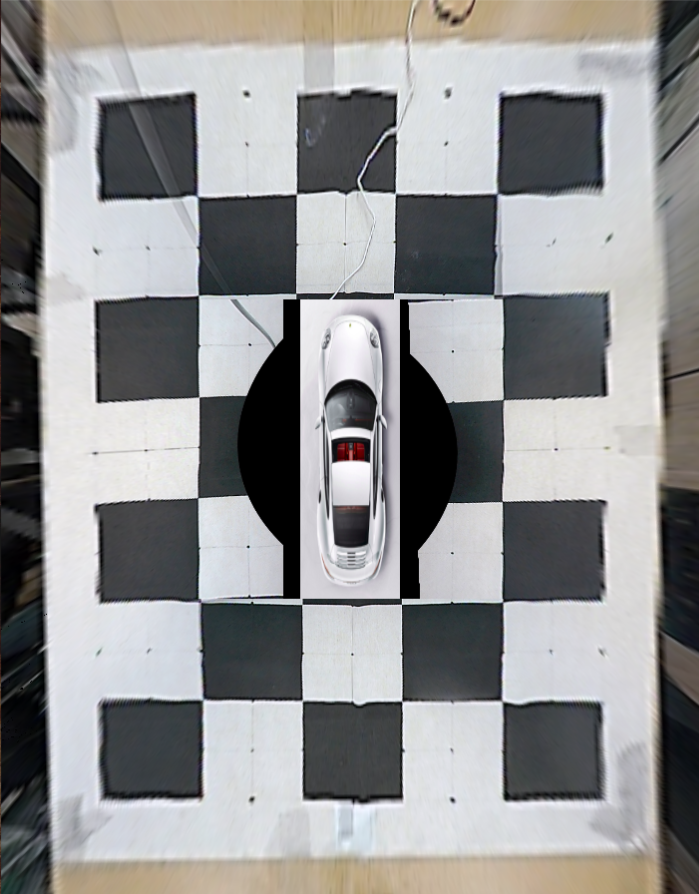
- 图像拼接:依据预先标定的位置关系,将四张鸟瞰图无缝拼接成一张完整的360°全景俯视图。
- 显示:为快速验证核心流程,目前采用OpenCV的
imshow函数进行结果显示。此方式效率非最优,后续将优化为DRM/KMS等低延迟工业级显示方案。
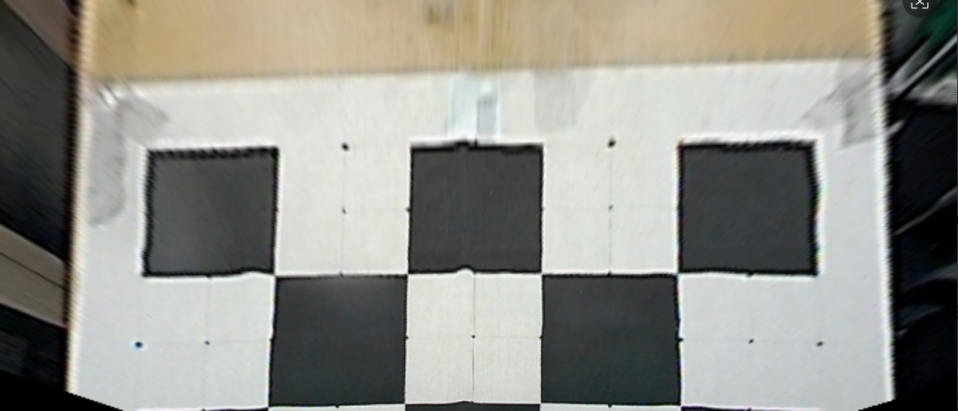
畸变矫正前:

畸变矫正后:

投影视图:
图像拼接效果:
性能实测:CPU与GPU的算力博弈
性能是决定方案能否商用的关键。我们以行业通用的25fps(每帧处理间隔40ms)作为实时性标准,在开发板上对数据处理管线进行了精细的性能剖析。

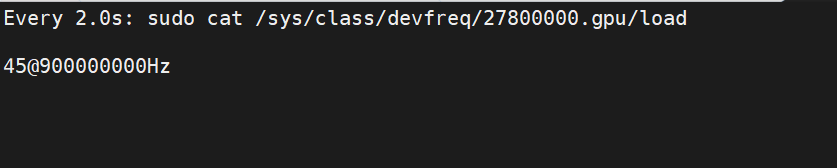
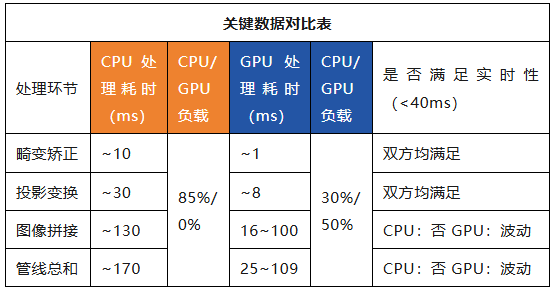
深度性能分析:
未来拓展:融合NPU算力,实现智能感知
一旦GPU处理管线优化稳定,系统将获得充裕的时间预算和富余的CPU资源,为集成高价值AI功能奠定基础。
剩余时间预算分析:
在25fps帧率下,系统必须在40ms内完成一帧处理。假设GPU流水线稳定在25ms完成基础环视处理,则剩下约15ms的时间裕度。
NPU的用武之地:
这15ms的宝贵时间,正是留给RK3576内置6TOPS NPU的舞台。我们可以利用这部分算力,在环视全景图或原始鱼眼图上并行运行轻量级AI模型,实现功能升级:
- 障碍物检测与识别:精准识别车辆周围的行人、车辆、锥桶等。
- 空间距离估算:基于俯视图的几何关系,实时计算物体与车身的距离。
- 主动预警系统:当距离低于安全阈值时,立即触发声光警报,从系统层面实现主动安全。
总结与展望
- 功能实现:基于RK3576的平台完全具备实现高质量360环视全链路功能的能力。
- 实时性能:纯CPU方案无法满足实时需求。GPU方案算力潜力充足,但其执行的稳定性是当前能否商用的关键挑战。
- 方案潜力:一旦GPU性能稳定,RK3576凭借其异构计算架构(CPU+GPU+NPU),能够在一帧时间内不仅完成环视合成,更能集成复杂的AI感知功能,从而从一个环视处理器升级为高集成度的智能视觉平台。
|  发表于 2025-12-12 23:47:10
|
查看: 339|
回复: 1
发表于 2025-12-12 23:47:10
|
查看: 339|
回复: 1

