
跳过复杂的配置,ROSOrin Pro 轻松将 OpenClaw AI 智能体部署到树莓派,实现零压力集成。
项目所需器材
硬件组件
- ROSOrin Pro(含已装配激光雷达)×1
- 6 自由度机械臂 ×1
- 12.6V 2A 充电器(DC 5.5×2.5)×1
- 无线遥控器 + 接收器 ×1
- 彩色方块(30×30 毫米)×1
- 读卡器 ×1
- 内六角扳手 ×1
- 螺丝刀 ×1
- 螺丝配件包 ×1
- 使用说明书 ×1
- Aurora930 Pro 深度相机 ×1
- 相机支架 ×1
- 数据线(550 毫米)×1
- WonderEcho Pro AI 语音交互盒 ×1
- Type‑C 线(280 毫米)×1
项目背景:打造会“思考”的树莓派
对众多创客而言,终极目标是让树莓派超越简单的“条件判断”逻辑,拥有真正的“大脑”——一套能听懂语音指令、拆解任务步骤、并完成实物操作的系统。
传统方式下,在树莓派部署 OpenClaw AI 智能体,需要深入解决驱动冲突、库版本兼容、复杂 ROS 2 配置等问题。而对于想直接进入 AI 机器人核心开发的用户,更高效的方案是使用 ROSOrin Pro。
为何要省去繁琐部署?
ROSOrin Pro 不只是一套套件,它是为高阶 ROS 教学打造的完整集成生态。它完美兼容高性能的树莓派 5 与 NVIDIA Jetson 平台,真正的优势在于开箱即用。
无需花费数周时间将大语言模型(LLM)与机械臂对接,ROSOrin Pro 已与 OpenClaw 智能体深度集成。这种预配置协同让机器人可自主完成以下核心工作:
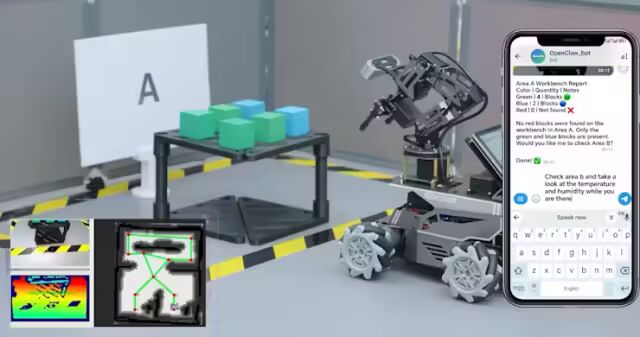
- 自主任务拆解:将“清理工作台”这类模糊指令转化为一系列物理动作。
- 智能决策:基于实时数据,根据物体位置与形状决定抓取方式。
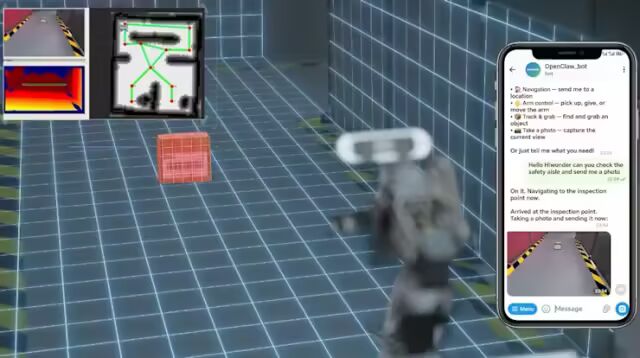
- 远程多模态控制:通过远程语音与文本指令执行任务,初始配置无需编写任何代码。
如需更多 OpenClaw 资源,可访问 Hiwonder OpenClaw GitHub 仓库,快速启动你的下一个项目。
https://github.com/Hiwonder/OpenClaw
硬件协同:视觉、执行与大脑
在树莓派 5 上高效运行 AI 智能体,不仅需要软件,更需要匹配的“身体”。ROSOrin Pro 的高性能硬件组合恰好满足这一需求:
- 视觉系统:搭载 3D 深度相机与飞行时间(TOF)激光雷达,为 OpenClaw 智能体提供 360° 环境感知,支持 SLAM 建图与动态避障。
- 机械臂:6 自由度机械臂是智能体逻辑的物理执行端,可实现 3D 物体识别、分拣与搬运,这是普通 4 轴机械臂无法比拟的。
- 智能核心:支持多模态 AI 模型在线与本地离线部署。无论是调用 Gemini API 还是运行本地模型,ROSOrin Pro 都能保证 AI 与 ROS 2 Humble 底层通信无缝顺畅。
新手零门槛入门
具身 AI 最大的门槛之一是陡峭的学习曲线。ROSOrin Pro 附带详尽教程与开发手册,解决了这一问题。
无论你是树莓派新手还是高阶研究者,文档都覆盖完整学习路径。你无需成为资深工程师即可运行 OpenClaw;ROSOrin Pro 提供“零压力”开发环境,通过结构化项目,带你从基础运动控制逐步上手自主导航与 AI 驱动的机械操作。
总结:专注创新,而非集成
如果你想在树莓派上探索具身 AI 的前沿领域,不必把时间浪费在驱动调试上。选择现成的产品或者平台,这样你就能把精力投入到其它的事情上。例如下面这款 AI 智能体盒子,ED-CLAWBOX 是一款基于 Raspberry Pi CM5 的工业级 AI 智能体盒子,专为 OpenClaw 端侧私有化部署而设计。

整机采用铝合金 CNC 加工外壳,精致小巧(100×100×19mm),重仅 247g。接口齐全:双 HDMI 输出(标准+Micro)、千兆以太网、双频 Wi-Fi/蓝牙 5.0、USB 3.0 接口等。它预装了极术社区开源的 JishuShell 管理面板,能在几分钟内为你提供一个完全本地化、数据私有的 AI 工作站。无论是开发调试、多任务并行,还是 7x24 小时不间断运行的场景,ED-CLAWBOX 都凭借其低功耗、高性能和完整的树莓派生态,成为探索 AIoT 应用的理想硬件基石。
家里有小孩?直接整一个!( edatec.cn/zh/clawbox )

小贴士:对于刚接触树莓派的新手,面对英文文档和复杂配置很容易无从下手。 pidoc.cn 是树莓派中文一站式学习平台,内容系统、更新及时,能让零基础用户轻松上手。
相关链接
ROSOrin Pro: https://www.hiwonder.com/products/rosorin-pro
最后,在 云栈社区 和同好们交流更多有趣的硬件创客项目,总能碰撞出不一样的火花。 |  发表于 2026-5-13 16:20:09
|
查看: 122|
回复: 0
发表于 2026-5-13 16:20:09
|
查看: 122|
回复: 0
