在直流微电网系统中,实现多台并联储能单元间的合理功率分配,对于延长系统整体寿命、提升运行稳定性至关重要。本文探讨一种基于储能单元SOC(State of Charge,荷电状态)均衡的动态功率分配策略,并通过Simulink仿真验证其有效性。
一、仿真场景搭建
为验证策略,搭建了一个简化的直流微电网仿真模型:
- 主电源:采用1kW光伏电池模拟直流微电网的发电单元。
- 储能单元:两台1kW的储能单元(如蓄电池)并联接入直流母线。
- 初始状态:设定两台储能单元的初始SOC分别为80%和60%,系统初始运行于放电模式。
- 工况切换:在3秒时将系统切换为充电模式,在6秒时再次切换回放电模式,并持续运行至两台储能单元的SOC达到均衡。
该场景的核心目标是:无论在充电还是放电状态下,系统总电流都能根据各储能单元的实时SOC进行动态、合理的分配,最终实现SOC的均衡。
二、核心分配算法解析
功率分配的核心在于控制器中的电流分配算法。其基本思想是:在放电时,SOC较高的单元承担更多电流;在充电时,SOC较低的单元吸收更多电流,以此缩小SOC差异。
以下为该策略的核心伪代码逻辑:
function [I1, I2] = current_alloc(soc1, soc2, I_total, mode)
% 计算SOC绝对差值
delta_soc = abs(soc1 - soc2);
% 引入sigmoid函数作为动态调节系数,差异越大调节作用越强
k = 1 / (1 + exp(-delta_soc * 10));
if mode == “放电”
% 放电分配:SOC占比高的单元输出更多电流
I1 = I_total * (soc1 / (soc1 + soc2)) * (1 + k);
I2 = I_total - I1;
else % “充电”
% 充电分配:(1-SOC)占比高的单元吸收更多电流
I1 = I_total * ((1 - soc1) / (2 - soc1 - soc2)) * (1 + k);
I2 = I_total - I1;
end
end
算法关键点:
- 基础比例分配:基于SOC(放电)或(1-SOC)(充电)进行比例分配。
- 动态强化系数
k:通过sigmoid函数将SOC差值映射为一个0~1之间的系数。当SOC差异显著时,k值增大,算法会强化分配倾向,让SOC高的放得更多(或SOC低的充得更多),从而加速均衡过程;当SOC接近时,k值趋近于0,分配趋于平缓,避免过度调节。这种设计融合了经典控制理论与自适应思想,是解决此类非线性均衡问题的常见思路,可参考算法/数据结构中关于优化算法的讨论。
三、仿真结果与分析
通过Simulink搭建仿真模型,可以直观地观察系统动态。下图展示了系统的整体仿真结构,其中光伏单元、带控制器的储能变流器及直流母线清晰可见。
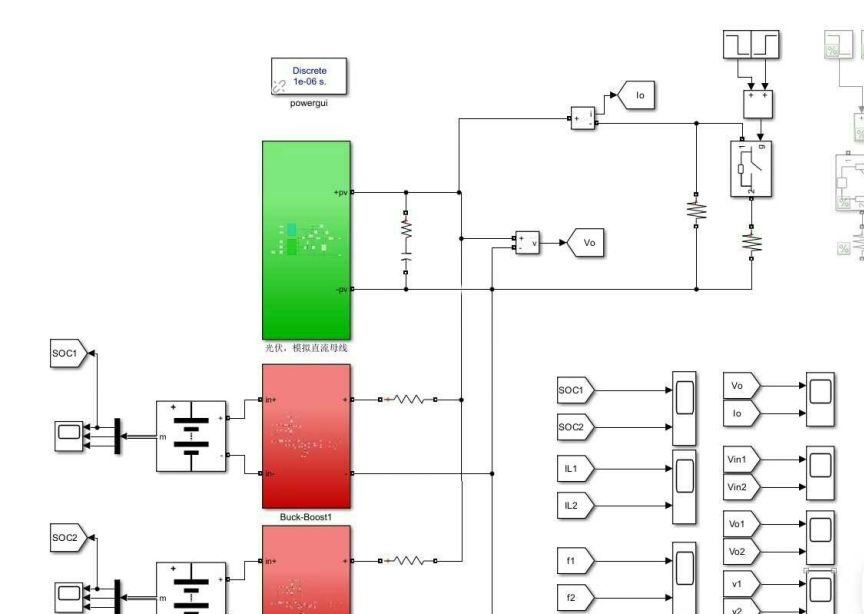
图1:基于Simulink搭建的直流微电网仿真模型,包含光伏源、双储能单元及控制回路。
运行仿真后,关键波形如下所示:
1. 充放电电流分配波形
下图展示了两个储能单元的输出电流 IL1 和 IL2 随时间的变化。
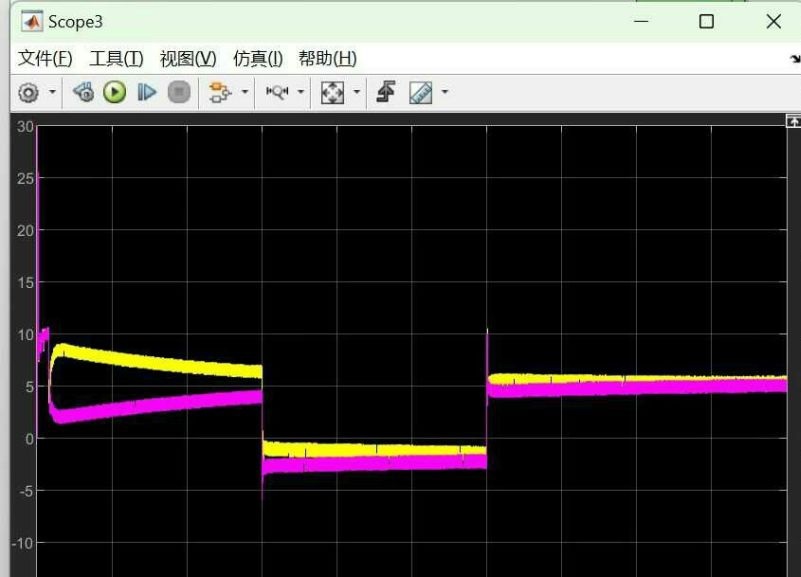
图2:0-10秒内两台储能单元的电流变化。可以清晰看到在3秒和6秒的工况切换点,电流方向与分配比例发生了动态调整。
波形分析:
- 0-3秒(放电):SOC为80%的单元(
IL1)承担约0.7A电流,SOC为60%的单元(IL2)承担约0.3A,体现了“高SOC多放电”的原则。
- 3-6秒(充电):电流瞬间反向。SOC较低的单元(
IL2)如同“饿虎扑食”,吸收了约60%的总充电电流,符合“低SOC多充电”的策略。
- 6秒后(再次放电):此时两单元SOC差值已缩小至约5%,电流分配比例接近55:45,趋于均衡。
2. SOC均衡过程波形
SOC的变化曲线直接反映了均衡策略的效果。
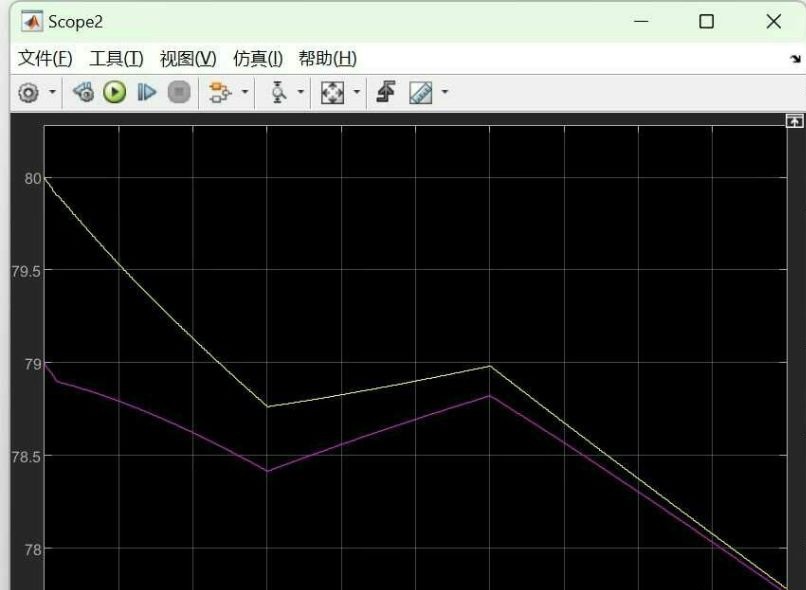
图3:两台储能单元的SOC变化曲线。初始差异为20%,经过充放电状态的动态调整,两条曲线最终收敛重合。
从SOC曲线可以观察到,在3秒切换到充电模式后,SOC较低的单元充电速度明显更快,使得两条曲线的差距迅速缩小。整个仿真周期结束时,两个储能单元的SOC达到一致,验证了分配策略的有效性。
四、实践思考与注意事项
- 充放电效率差异:在实际系统中,电池的充放电效率通常不同。仿真中发现,充电阶段的SOC均衡速度往往快于放电阶段。在实际应用时,可能需要在算法中引入效率补偿系数,以更精确地匹配物理特性。
- 通信延迟的影响:本策略依赖于中央控制器获取各单元的实时SOC。若通信延迟过大(例如超过200ms),控制器发出的指令将基于过时状态,可能导致系统振荡或不稳定。因此,在工程化部署时,需考虑采用本地观测器或预测算法进行延迟补偿,或设计更鲁棒的控制律。
- 仿真工具的价值:利用Simulink等工具进行前期建模与仿真,能够以极低成本验证控制算法的可行性、观察系统动态响应并暴露潜在问题,是电力电子与能源系统开发中不可或缺的一环。
|  发表于 2025-12-14 05:44:28
|
查看: 270|
回复: 0
发表于 2025-12-14 05:44:28
|
查看: 270|
回复: 0
