两轮差速移动机器人(WMR)的轨迹跟踪控制是一个经典问题,需要同时兼顾纵向速度跟踪与横向路径跟踪。传统PID控制方法在应对这种多目标耦合任务时,往往难以协调。本文将探讨如何利用模型预测控制(MPC)这一先进控制算法,在Matlab/Simulink环境中实现对差速底盘横纵向轨迹的联合跟踪控制,并通过五种典型轨迹进行仿真验证。
本文项目采用Simulink搭建被控对象模型,使用Matlab代码编写MPC控制器,实现了无需第三方软件联合仿真的完整仿真流程。
!DAMO开发者矩阵

一、差速底盘运动学建模
控制算法的设计始于精确的模型。对于两轮差速底盘,其核心原理是通过左右轮的转速差实现转向。将车体坐标系下的运动转换至世界坐标系,可建立如下状态方程:
% 状态量:x位置、y位置、航向角θ、线速度v
% 控制量:左右轮转速差Δω
function dx = kinematicModel(~, x, u)
L = 0.5; % 轮距
v = x(4);
theta = x(3);
dx = [v * cos(theta);
v * sin(theta);
(u(1) - u(2)) / L; % 航向角变化率
(u(1) + u(2)) / 2]; % 线速度变化率
end
该模型是MPC预测未来N步系统状态的基础,即根据当前的速度与方向,递推预测未来一段时间内的机器人轨迹。
!机器人运动学模型状态变量示意图

二、MPC控制器设计:增量式优化
为了确保控制量输出平滑,避免突变,本设计采用了控制增量作为优化变量,而非直接优化控制量本身。这种增量式MPC通过在目标函数中惩罚控制量的变化,使输出更平稳。
% MPC目标函数核心代码段(简化示意)
cost = 0;
for k = 1:N
% 惩罚状态误差(跟踪精度)
cost = cost + (X(k,:) - refTraj(k,:)) * Q * (X(k,:) - refTraj(k,:))';
if k < N
% 惩罚控制增量(输出平滑度)
cost = cost + deltaU(k,:) * R * deltaU(k,:)';
end
end
其中,Q和R分别为状态误差和控制增量的权重矩阵。调整R矩阵的权重可以有效调节系统的“激进”程度:权重越大,控制动作越温和,但响应速度可能下降;反之,跟踪可能更迅速,但控制输出波动更大。这涉及到经典的算法优化与权衡问题。
三、仿真验证:五种轨迹生成
为全面验证控制器性能,项目预设了五种参考轨迹进行测试,包括不同车速的圆形轨迹、直线轨迹以及双移线轨迹。
% 示例:双移线轨迹(Double Lane Change)生成函数
function ref = generateDoubleLane(v)
t = 0:0.1:20;
ref = [v * t';
3.5 * sin(0.4 * t)';
zeros(length(t), 1); % 航向角参考(简化)
v * ones(length(t), 1)]; % 速度参考
end
- 圆形轨迹:主要考验控制器的横向路径跟踪能力,通过改变半径和车速组合测试不同工况。
- 直线轨迹:看似简单,但在高速下维持精确航向,需要MPC对左右轮速差进行极其精细的协调。
- 双移线轨迹:模拟“蛇形”绕桩,对控制器的动态响应和超调抑制能力提出较高要求。
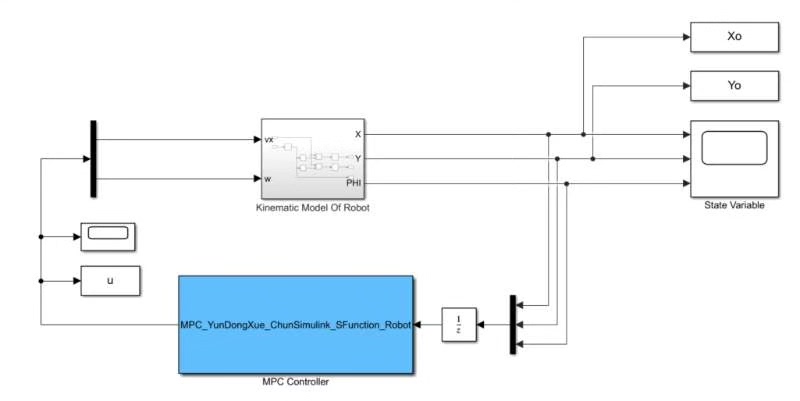
四、Simulink模型搭建要点
!Simulink模型中的MPC控制器S函数模块
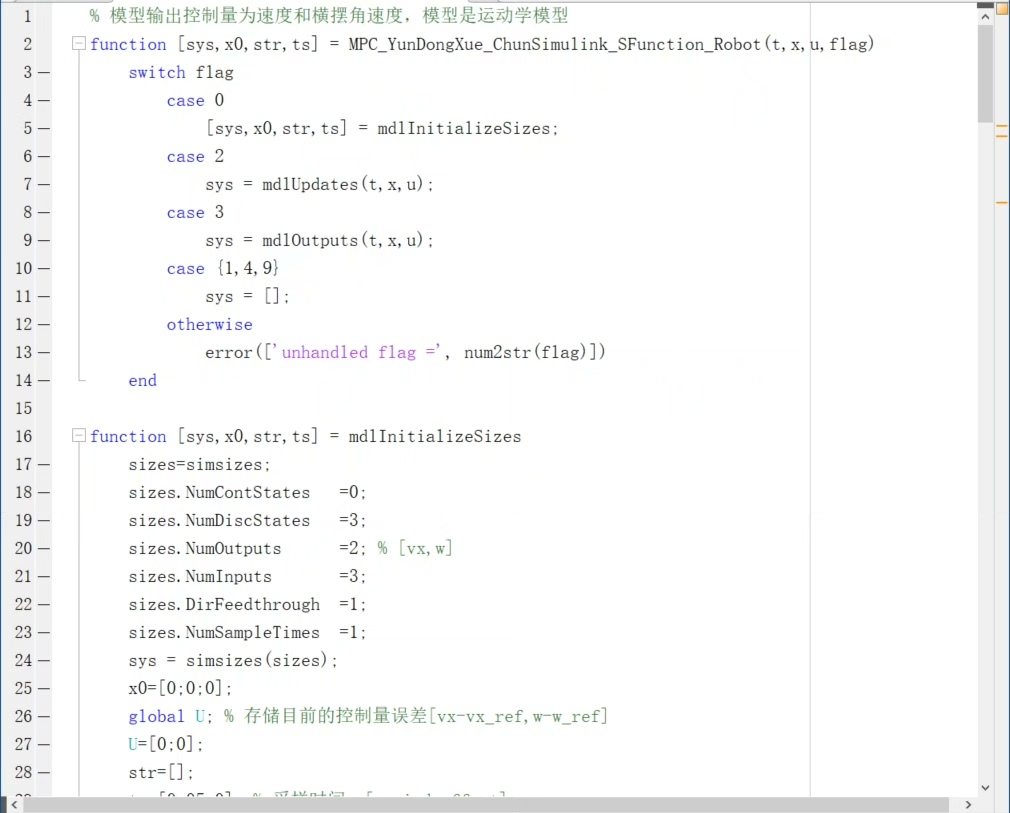
在Simulink中,MPC控制器通常通过S-Function模块集成。一个关键配置是采样时间与预测步长的匹配。在本仿真中,采样周期设置为100ms,预测步长为10步,这意味着控制器每次都在优化未来1秒内的系统行为。经验表明,预测时域过长(如超过1.5秒)可能因模型误差累积而导致优化问题发散。
五、仿真结果与可视化分析
通过运行仿真,可以获取实际轨迹与参考轨迹的数据。项目内置了数据对比与绘图脚本,可一键生成分析图表。
% 轨迹对比可视化代码
figure('Position', [200 200 800 600])
hold on;
plot(actualX, actualY, 'LineWidth', 2);
plot(refX, refY, '--r', 'LineWidth', 1.5);
legend('实际轨迹', '参考轨迹', 'Location', 'best');
xlabel('X位置 (m)'); ylabel('Y位置 (m)');
title('双移线轨迹跟踪效果对比');
grid on;
exportgraphics(gcf, 'result.png', 'Resolution', 300); % 导出高清图片
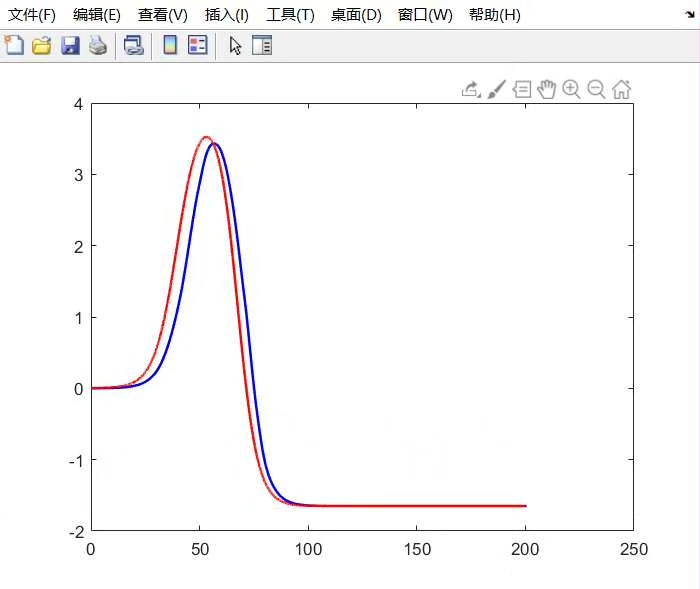
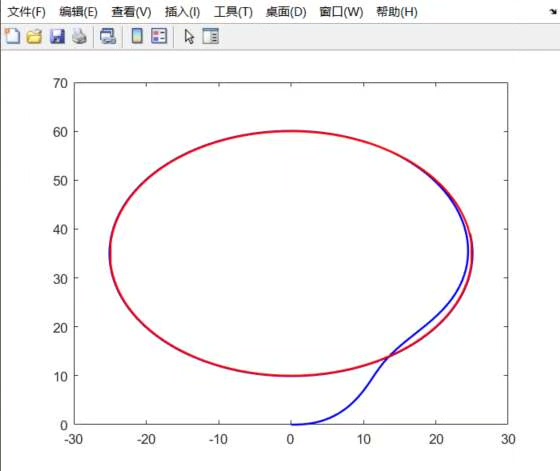
!轨迹跟踪效果对比图
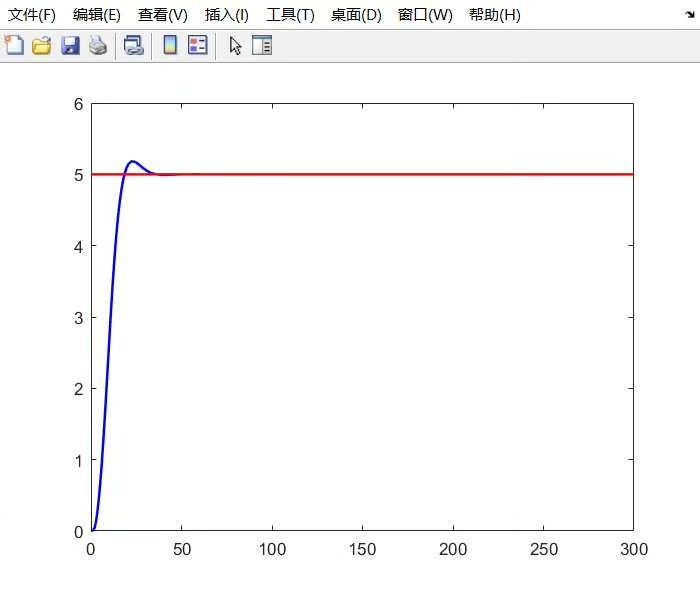
 !速度跟踪效果曲线图
!速度跟踪效果曲线图
仿真结果表明:
- 圆形轨迹跟踪:横向位置误差可稳定在0.1米以内。
- 双移线轨迹跟踪:在轨迹曲率突变点(转向点)会出现瞬时最大约0.2米的误差,但控制器能快速收敛修正。
- 速度跟踪:全程速度跟踪误差保持在±0.05 m/s的范围内,体现了良好的纵向控制性能。
!更多仿真结果可视化图表
六、关键配置与调优建议
- 雅可比矩阵计算:在构建MPC预测模型时,推荐使用数值差分法实时计算雅可比矩阵。使用符号计算虽然精确,但会大幅增加计算负担,影响实时性。
- 控制量约束:设置电机转速或转矩约束时,建议留有约10%的余量。这能为优化求解器提供缓冲空间,避免因在约束边界来回震荡而导致求解失败。
- 初始状态:若机器人的初始位姿与参考轨迹的起点偏差过大,MPC可能无法有效收敛。在实际应用中,可考虑结合“预瞄”或初始对准策略来改善。
- 权重调整:
Q和R矩阵的调参是核心。可遵循从单一轨迹(如直线)开始,初步调整使系统稳定,再在复杂轨迹(如双移线)上微调以平衡响应速度与平滑性的步骤。这个过程本身是人工智能与控制领域的一个实践结合点。
本文提供的完整仿真模型代码结构规范,关键部分均有详细注释,并附有相关参考文献,可供进一步研究与开发。
 发表于 2025-12-17 22:26:18
|
查看: 259|
回复: 0
发表于 2025-12-17 22:26:18
|
查看: 259|
回复: 0
