工业自动化和机器视觉领域,相机标定与图像处理是实现高精度测量和识别的基础环节。无论是定位零件、检测缺陷,还是进行颜色分类,背后都离不开一套稳定、可交互、易调试的图像分析工具。
本文介绍一套基于 C# 开发的轻量级但功能完整的图像处理与相机标定辅助系统。它不追求炫酷的界面,而是聚焦于在实际调试中真正需要的操作逻辑——比如手动选点、自动提取角点、拟合直线、计算像素当量等。
项目概述
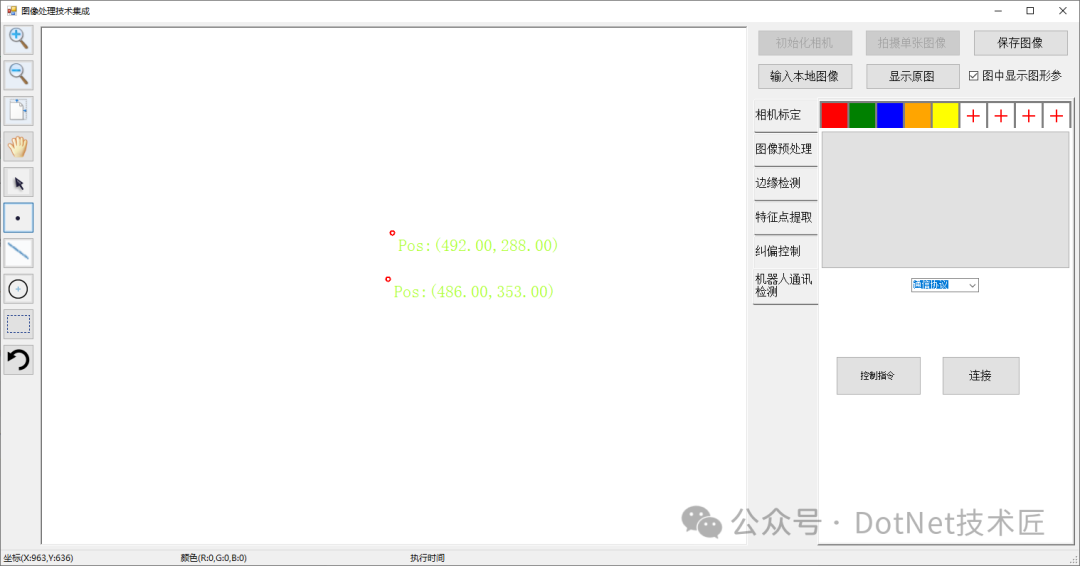
本项目是一个基于 WinForm 开发的桌面应用程序,其核心目标是辅助用户高效完成相机标定过程中的关键步骤,并提供基础的图像分析能力。
程序通过调用底层图像处理模块(如 CameraCalibrate 类),实现了对标定板的自动或手动特征点提取、像素尺寸计算、直线参数拟合等功能。
用户可以在图像上直接拖动、点击选取关键位置,系统会实时反馈计算结果,例如标定板行列数、已提取点数量、像素/毫米换算比例等。整个流程兼顾了自动化效率与人工干预的灵活性,特别适合在标定环境复杂、自动提取失败时进行手动修正。
核心功能详解
1. 自动提取标定板角点
点击“自动取点”按钮,系统即可调用内置算法快速识别棋盘格或特定图案的交点,并显示算法运行的耗时,便于性能评估。
2. 手动选取标定板顶点
当自动提取因光照、遮挡等原因不可靠时,用户可按预设的顺时针顺序依次点击四个角点,完成手动标定,确保数据的准确性。
3. 标定参数确认与重置
提供“取点确认”和“重置”功能,使用户能够对当前提取结果进行校验,满意后再进行后续的复杂计算,避免错误数据污染流程。
4. 动态配置标定板尺寸
用户可直接输入标定板的实际宽(列数)和高(行数),系统会自动校验参数合理性,并提示是否需要重新取点,以适应不同规格的标定板。
5. 直线参数拟合与显示
在图像上任意选择两点后,系统会自动计算并显示出该直线的一般式参数(Ax + By + C = 0),结果以保留两位小数的清晰格式展示。
6. 流畅的图像交互操作
支持通过鼠标拖拽来平移浏览大尺寸图像,并结合十字光标实现像素级精准选点,极大地提升了操作体验与调试效率。
项目设计特点
该工具最大的特点是“所见即所得”的交互设计。所有操作都在图像视图上直接完成,反馈即时,无需在多个窗口或坐标输入框之间切换,符合工程师的直觉。
在代码架构层面,项目采用了工具类(BaseTool)的继承机制,巧妙地将“拖拽工具”、“点选工具”等交互行为封装为独立对象,这种设计模式为后续扩展新的交互方式提供了便利。
同时,系统逻辑清晰,严格区分自动与手动流程,避免状态混乱。例如,修改标定板尺寸后会自动清空已提取的点数,强制用户重新取点,防止因参数不一致导致的计算错误。这类细节设计充分体现了对工程可靠性的重视。
关键技术实现
项目基于 .NET Framework 开发,使用经典的 WinForm 作为界面框架,并未依赖 OpenCVSharp 等大型图像库,而是通过自定义的图像处理逻辑实现核心功能,保持了项目的轻量与可控。
关键技术点包括:
- 直线拟合:利用
Math.Sin 和 Math.Cos 函数将角度转换为直线法向量,进而求解出直线的一般式参数。
- 任务标识:通过
GetHashCode 或生成 Guid 来创建临时任务ID,满足模块内部的标识需求。
- 事件驱动:采用成熟的事件驱动模型来响应用户的按钮点击、文本框变更等操作,这是构建响应式桌面应用的常用网络/系统架构。
- 图像渲染:图像显示区域(presentBox)支持动态刷新与光标切换,确保了交互过程的视觉流畅度。
整个项目结构简洁,没有复杂的第三方依赖,非常适合开发者理解其原理并进行二次开发。
核心代码接口
以下展示了与底层 CameraCalibration.dll 交互的部分关键P/Invoke接口定义,涵盖了从特征提取到标定计算的全过程:
/// <summary>
/// 手动辅助选取角点接口
/// </summary>
[DllImport("CameraCalibration.dll", CallingConvention = CallingConvention.Cdecl, EntryPoint = "#2")]
public static extern bool manualExtract(string filename, ref int cornerNum,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 2)] float[] cornerX,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 2)] float[] cornerY,
int boardWidth, int boardHeight, int manualFixSize, int fixSize);
/// <summary>
/// 自动选取角点接口
/// </summary>
[DllImport("CameraCalibration.dll", CallingConvention = CallingConvention.Cdecl, EntryPoint = "#1")]
public static extern bool autoExtract(string filename, ref int cornerNum,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 2)] float[] cornerX,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 2)] float[] cornerY,
int boardWidth, int boardHeight, int fixSize);
/// <summary>
/// 相机标定接口
/// </summary>
[DllImport("CameraCalibration.dll", CallingConvention = CallingConvention.Cdecl, EntryPoint = "#3")]
public static extern void runCalibrate(int imgNum, int imgWidth, int imgHeight, int cornerNum,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 4)] float[] cornerX,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 4)] float[] cornerY,
int boardWidth, int boardHeight, float boardSize, ref int resultNum,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 10)] float[] result);
/// <summary>
/// 图像校正接口
/// </summary>
[DllImport("CameraCalibration.dll", CallingConvention = CallingConvention.Cdecl, EntryPoint = "#4")]
public static extern void runUndistort(string filename,
int size, [MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 2)] byte[] data,
int paraNum, [MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 4)] float[] para, ref int channel);
[DllImport("CameraCalibration.dll", CallingConvention = CallingConvention.Cdecl, EntryPoint = "#5")]
public static extern float zAffineMat(int cornerNum,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 1)] float[] cornerX,
[MarshalAs(UnmanagedType.LPArray, SizeParamIndex = 1)] float[] cornerY,
int boardWidth, int boardHeight, float boardSize, float x1,float y1,float x2,float y2);
应用效果展示
实际操作中,用户输入标定板行列数后,点击“自动取点”,系统通常在几十毫秒内即可完成角点检测,并在状态栏显示耗时。若结果不理想,可一键切换至手动模式,按提示点击四个顶点。确认取点后,系统自动计算像素尺寸(例如 0.05 毫米/像素),并实时更新在界面上。
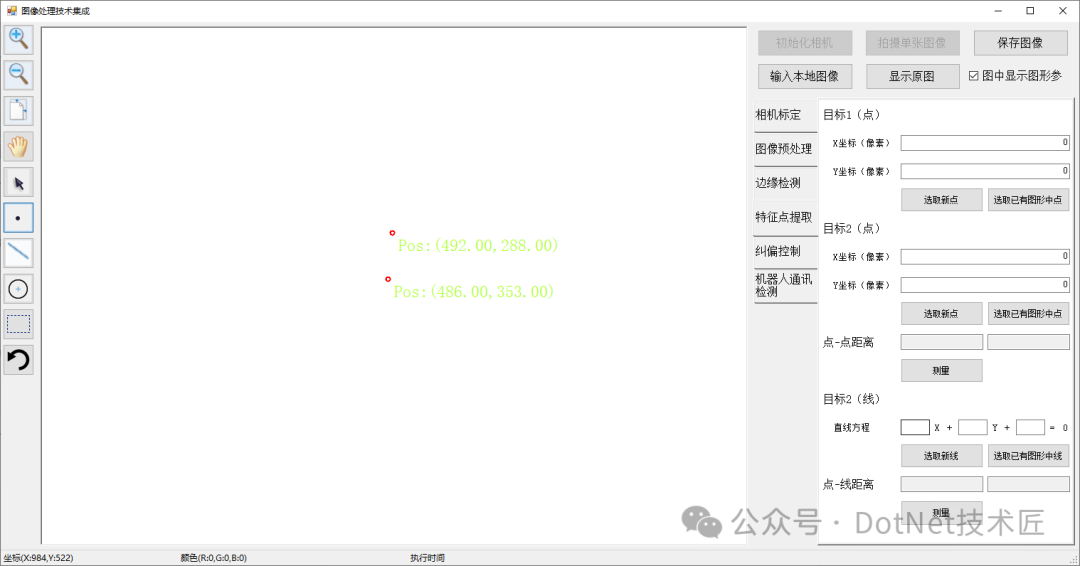
此外,选择图像上任意两点可立即得到拟合直线的 A、B、C 参数。所有中间结果均以文本形式清晰呈现,方便调试记录与数据追溯。
相机标定

图像处理
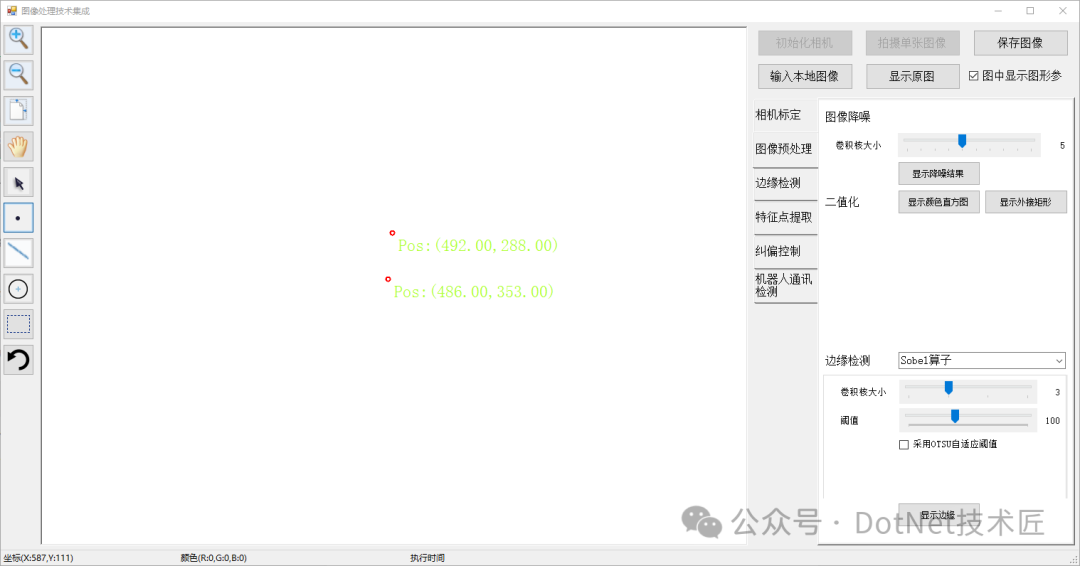
边缘检测
特征点提取
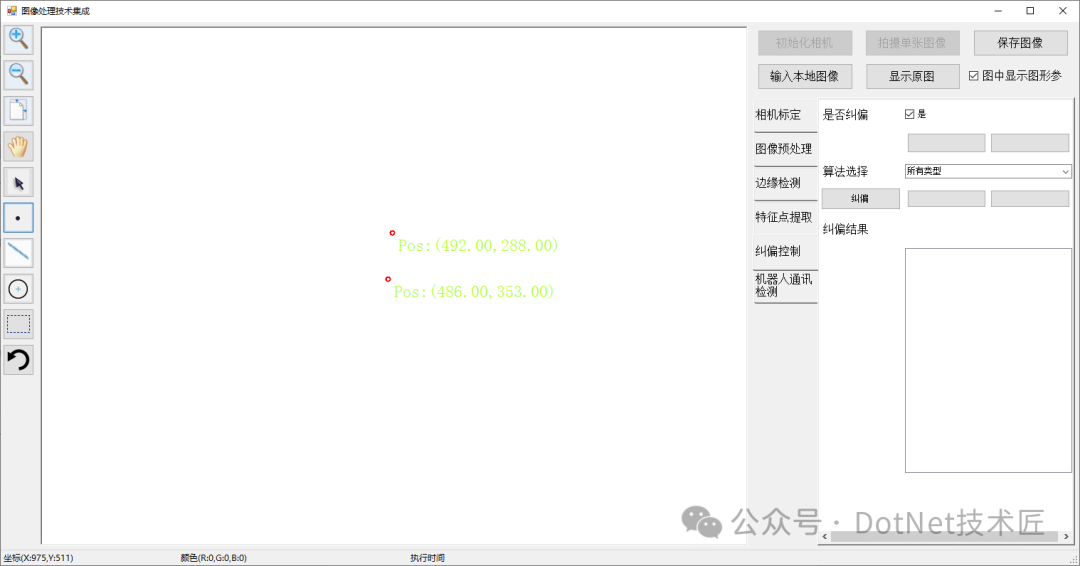
纠偏控制
机器人通讯检测
项目源码结构
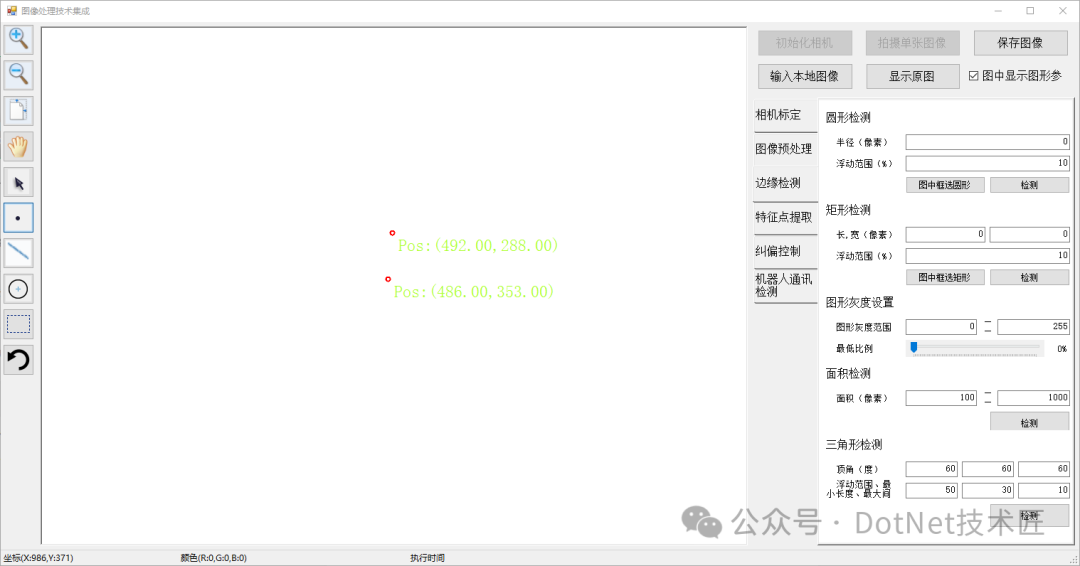
项目源码遵循清晰的模块化设计思路:UI层触发事件 → 调用业务逻辑层 → 更新界面状态。这种松耦合的结构使得未来新增功能(如添加圆检测、区域统计)变得相对简单,体现了良好的后端 & 架构设计思想。
https://gitee.com/smallcore/dot-net-vision
希望能帮助到大家,分享不易,欢迎点赞或转发[玫瑰][玫瑰]
总结
这套基于 C# 的图像处理与相机标定工具,虽界面朴素,却精准击中了工业视觉调试中的痛点——快速、可靠、可干预。它没有堆砌复杂的算法,而是把基础功能做到稳定可用,尤其适合中小型项目或作为学习参考的示例。
对于刚接触机器视觉的开发者而言,阅读其代码能快速理解“从图像采集到参数输出”的完整链路;对于有经验的工程师,则可将其作为脚手架,嵌入到自有系统中,加速开发进程。
 发表于 2025-12-19 19:00:50
|
查看: 257|
回复: 0
发表于 2025-12-19 19:00:50
|
查看: 257|
回复: 0
