概述
产品定位
本产品是一款面向高保密、高可靠性应用环境研发的军工级内网离线二维态势引擎。基于原生C++与Qt框架从底层自主构建,致力于为核心领域用户提供安全、自主、高效的态势感知与决策支持平台。
解决的核心问题
在军事指挥、应急救援等关键任务场景中,依赖互联网或商业地图软件的现有方案存在明显不足:
- 安全风险:涉密任务无法接入互联网,且商业软件存在数据外泄与供应链安全隐患。
- 性能局限:复杂战场环境下,海量数据的实时渲染与推演对系统性能提出极高要求,通用软件难以实现毫秒级响应。
- 适配困难:标准化商业产品难以灵活满足各行业特殊业务流程与私有化部署需求,集成深度有限。
核心价值
本引擎直面上述挑战,核心价值在于:赋能指挥决策,构建安全、高效、智能的离线态势平台。通过提供从源码级自主可控的技术体系,保障用户在完全隔离的内网环境中,实现大规模、高并发的态势可视化,将数据能力转化为决策优势。
目标用户
本产品主要适用于对态势感知具有高要求的下列领域:
- 军事指挥:战场态势展示、多兵种协同作战方案推演与效能评估。
- 应急救援:灾情评估、救援资源调度与行动路径规划。
- 模拟训练:构建高仿真训练环境,支持战术演练与指挥员培训。
- 国防教育:用于教学演示与战略战术研究。

用智能态势感知,赋能每一个关键决策。
跨平台测试
本引擎基于Qt 5版本构建,充分利用Qt框架的跨平台特性,支持Windows、麒麟、Linux等系统。
- 一次编写,到处编译:核心业务逻辑代码无需平台特定修改。
- 原生组件渲染:在各平台使用原生UI组件,确保最佳性能体验。
- 统一API接口:抽象底层操作系统差异,提供一致的开发接口。
麒麟国防版
麒麟桌面
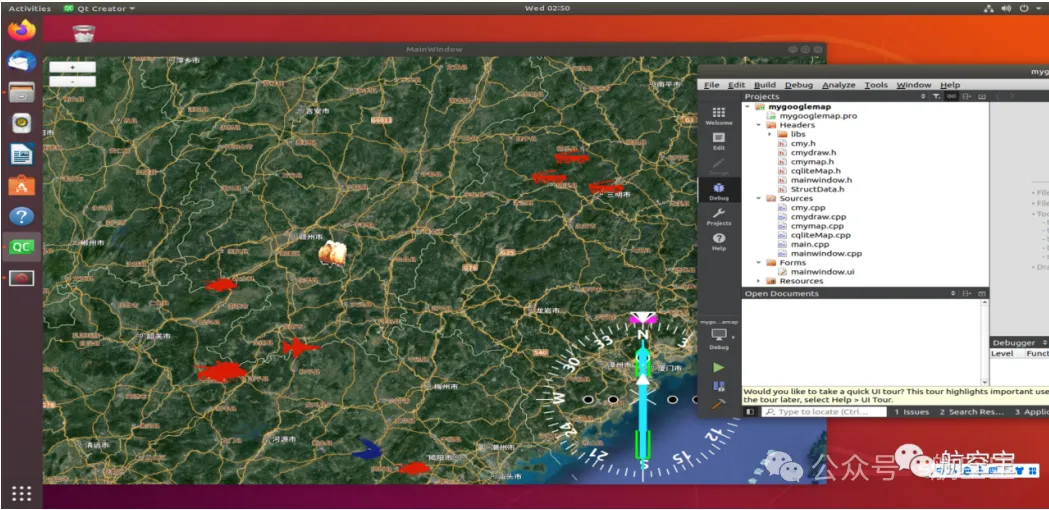
Ubuntu系统
核心技术优势
高保密与离线运行
- 内网离线:完全脱离外部网络依赖,物理隔离,从根本上杜绝网络攻击和数据泄露风险。
- 数据安全:本地数据存储与处理,满足军工、政府等领域最高级别的保密要求。
强大的定制与扩展能力
- 源码授权:提供源代码出售,用户可获得最高程度的自主控制权,便于深度定制和功能集成,满足二次开发需求。
- 贴牌服务:支持OEM/ODM合作,可作为核心引擎嵌入用户现有系统或产品中。
- 快速移植部署:地图数据采用非瓦片形式,解决大量数据难部署问题。
高性能与跨平台架构
- 技术栈:基于原生C++与Qt框架开发,非Web封装,从底层重构,充分发挥硬件性能。
- 性能表现:毫秒级渲染响应,秒级加载超大地图数据,确保指挥决策的流畅与实时。
- 兼容性:支持主流Windows/Linux/麒麟系统,可在普通PC、工控机及嵌入式设备上稳定运行,降低用户硬件成本。
核心功能详解
多源地图管理与展示
引擎支持多种图源,包括卫星图、数字地图、海图和地形图等多种地图数据。
数字地图
海图
卫星地图

地图蒙版
科技炫酷黑
战场要素标绘与编辑
实体数据库
实体数据库包含以下类别:
- 航空器:气球、飞艇、飞机、探测飞机、直升机、滑翔机。
- 航天器:导弹、火箭、人造卫星、航天飞机、空间探测器。
- 爆炸物:爆炸装置。
- 水面舰艇:导弹快艇、炮艇、军舰。
- 地面装备:导弹发射车、坦克导弹车、炮车、坦克。
- 水下装备:潜艇。
- 军用航空装备:轰炸机、军用无人机、多旋翼无人机。
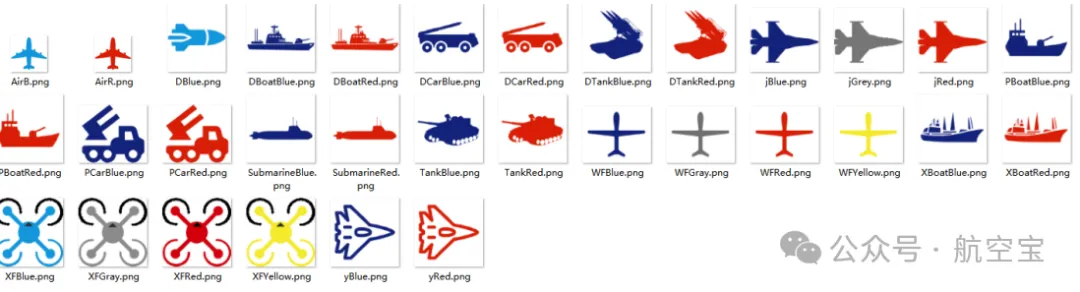
实体数据库
静态绘制
引擎提供了一套功能完善、易于操作的静态绘制工具,支持用户通过鼠标或触屏在地图上直接添加、编辑和管理各类静态态势元素。其绘制元素库丰富多样,具体包括:
基本图形绘制
支持直线、折线、曲线、圆形、椭圆形、矩形、多边形等基础几何图形,便于标注区域、路线或重点目标。
标准符号库
内置丰富的军事标准符号,可快速标绘部队、装备、设施及战术动作。
辅助元素
提供地图指南针、比例尺、图例、网格等元素,一键添加,提升态势图的规范性与专业性。
自定义标注
支持插入文字标签与注解框,可自由调整字体、颜色、大小,确保信息传达清晰直观。
后续将持续扩展更多绘制功能,满足多样化标绘需求。
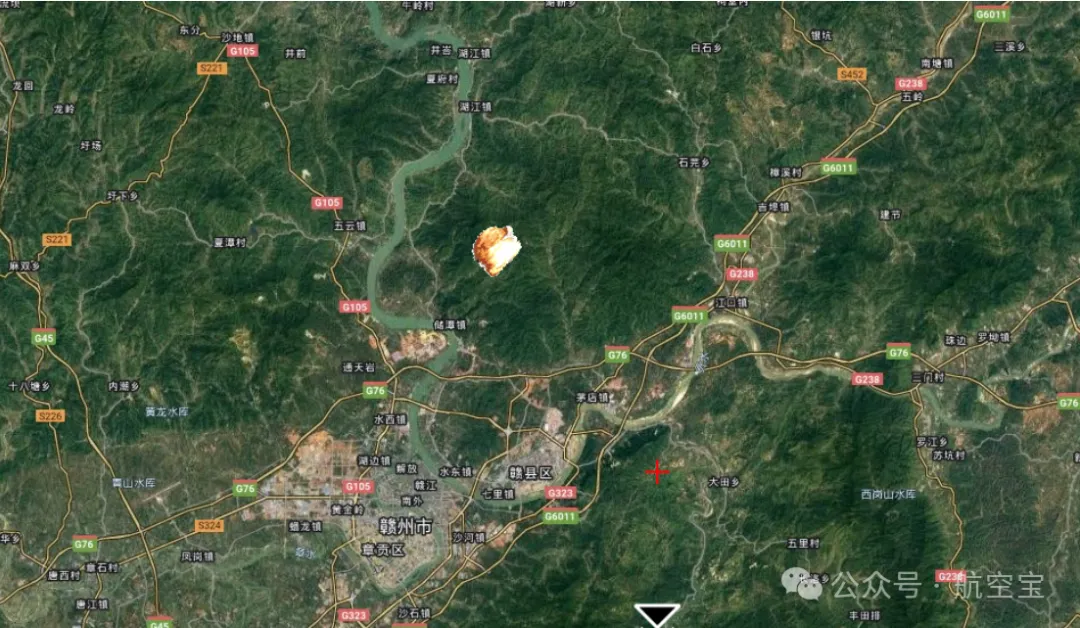
动态效果与爆炸渲染
引擎具备出色的动态效果渲染能力,可支持GIF动画显示,并内置多种标准动态效果,例如“爆炸”(EXPLODE)等。这使得瞬时的战场事件与复杂的装备状态能够以直观、醒目的方式呈现,显著增强了态势表达的层次感与实时性。
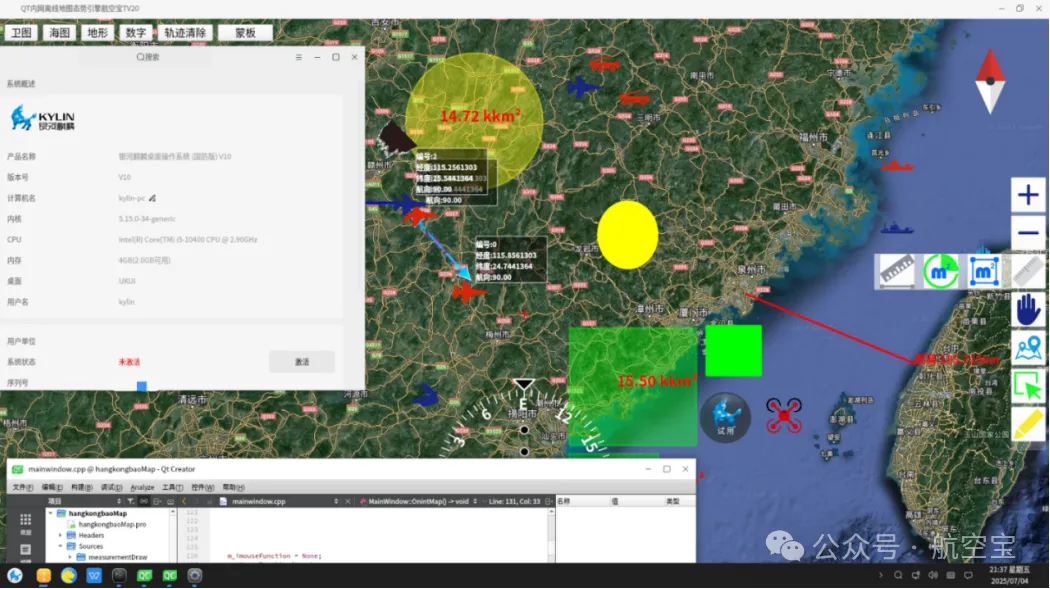
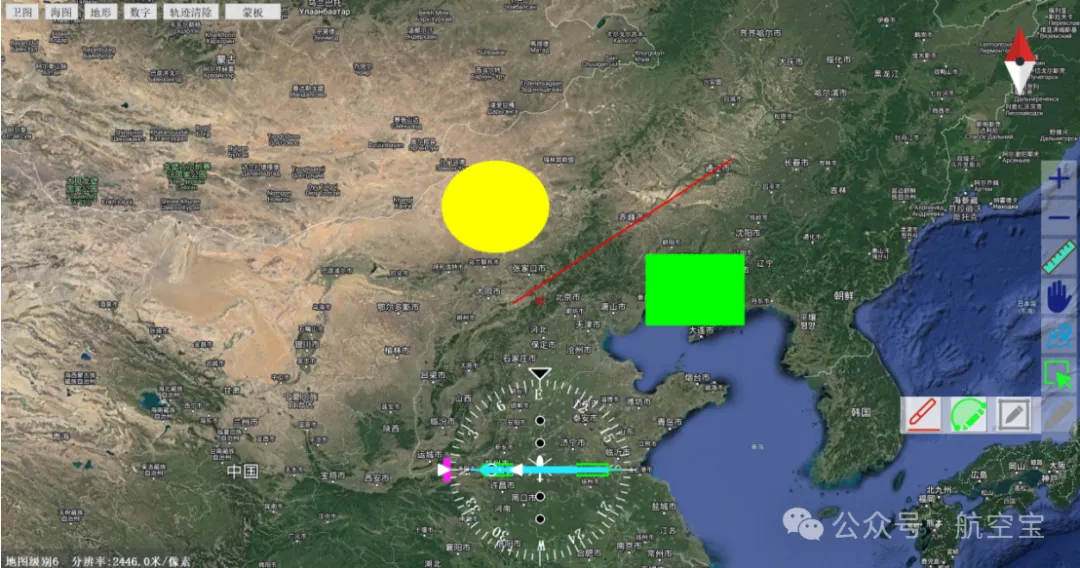
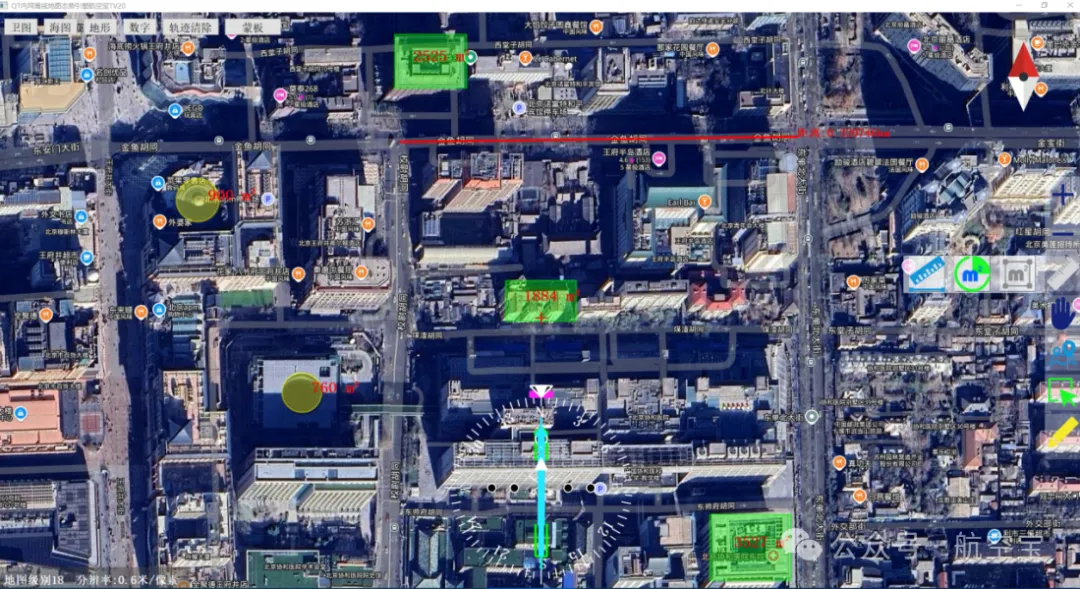
智能空间测量
引擎内置了直观易用的交互式测量工具,用户可通过简单的鼠标操作,快速获取地图上点、线、面的精确空间数据,为战术分析与决策提供量化支持。
智能距离测量
点击地图设定起点与终点,即可自动计算并高亮显示两点间的直线距离,测量值实时标注。
圆形面积测量
点击确定圆心后拖动调整半径,工具实时计算并显示该圆的周长与面积,便于快速评估区域覆盖或防御范围。
矩形面积测量
通过点击拖拽绘制矩形,引擎自动计算并显示其面积,适用于任务区域规划与目标范围评估。
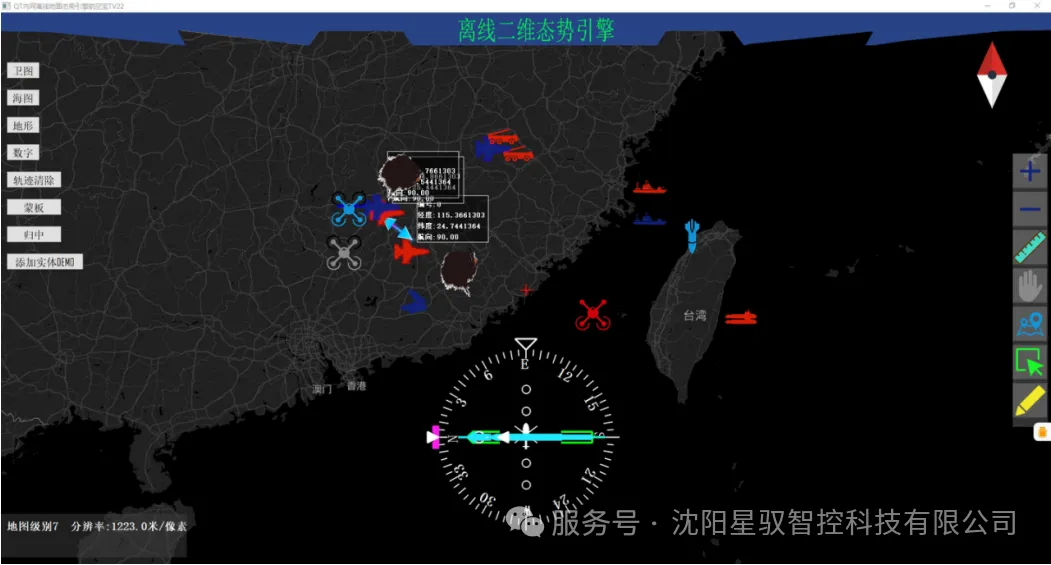
数据流与交互特效可视化
引擎的核心特性之一,是能够将实体之间的数据流动以特效形式进行可视化呈现。指挥员可借此清晰观察不同作战单元(例如侦察机与指挥中心、导弹发射车与目标之间)的信息传递、指令链路与火力通道等虚拟数据流。该功能通过动态线条、光流或粒子效果,直观展现战场上的信息交互与作战流程。

地图交互与可视化
平滑的地图浏览
引擎提供了流畅、响应迅速的地图浏览体验,支持用户自由探索全局态势。
无缝平移
用户可通过鼠标拖拽或触屏滑动,轻松向任意方向移动地图视口,快速浏览整个作战区域。视角切换过程平滑顺畅,无卡顿感。
多级缩放
支持鼠标滚轮、快捷键、滑动条等多种方式进行地图缩放。引擎采用高质量缩放算法,确保各级比例尺下地图内容清晰可辨。地图提供1至20级的缩放范围,最高分辨率可达0.1米/像素,使用户既能纵览全局,也能精准观察局部细节。

智能实体选择
实体选择是进行后续编辑、属性查看、指令下达等操作的基础,引擎提供了灵活且精准的选择机制。当前版本支持选中实体后弹出提示框,后续版本将持续完善以下功能:
点选与框选
支持通过鼠标点击精确选中单个实体,也支持通过拖拽绘制矩形区域来批量选中多个实体,大幅提升操作效率,尤其适用于对区域内多个目标进行统一处理的场景。
高亮视觉反馈
被选中的实体会立即呈现高亮效果(如改变图标颜色、增加选中框等),提供明确的操作反馈,确保用户清晰识别当前操作目标。
层级与属性筛选
在选择时,可根据实体类型、隶属关系等属性进行筛选,或在多层叠加显示的地图中精确选定目标层级,有效避免误操作。
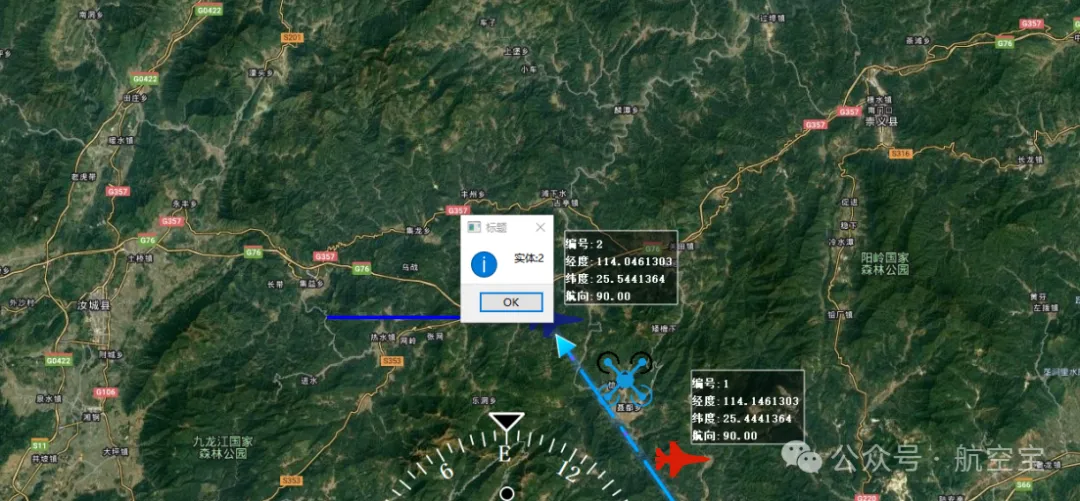
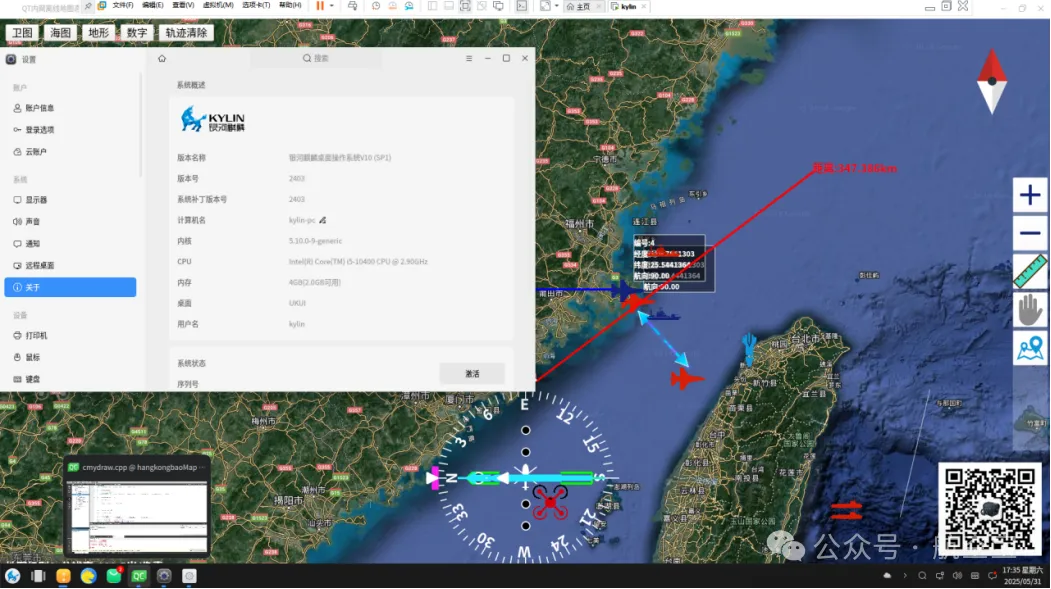
动态态势显示与推演
本引擎不仅支持静态态势标绘,更核心的价值在于能够对动态、实时态势进行强大展示与模拟推演,致力于构建一个高逼真、实时响应的数字战场环境。
引擎内置高效的以太网通信模块,具备强大的网络数据接入能力,支持通过 TCP/UDP 等标准协议实时接收来自外部传感器、仿真系统、指挥信息系统等数据源的实体信息(包括位置、姿态、状态、属性等)。引擎解析数据包后,实时驱动场景中对应实体进行状态更新与运动同步,实现战场态势的秒级乃至毫秒级刷新,确保指挥员始终掌握最新的战场实况。

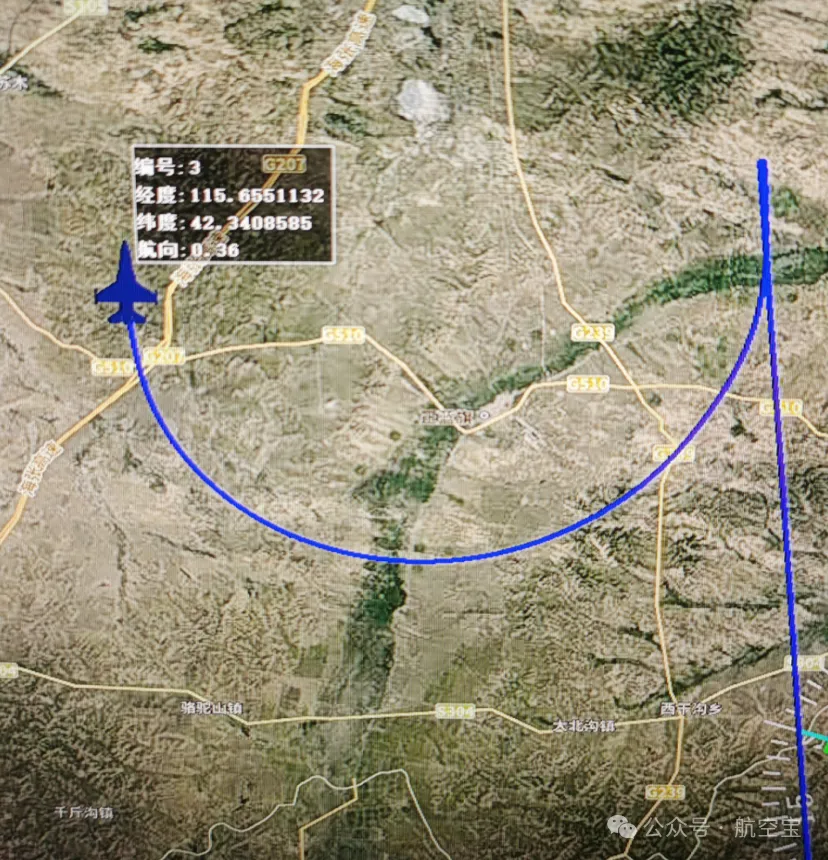
为了有效分析实体的运动规律和历史轨迹,引擎提供了灵活的实体轨迹与尾迹显示功能。用户可对每个实体单独设置是否显示其运动尾迹。尾迹通常以渐变的轨迹线形式呈现,其长度、颜色和透明度均可自定义。引擎也支持实体属性面板显示功能,可实时显示实体的信息,如标号、经度、纬度、航向等信息。
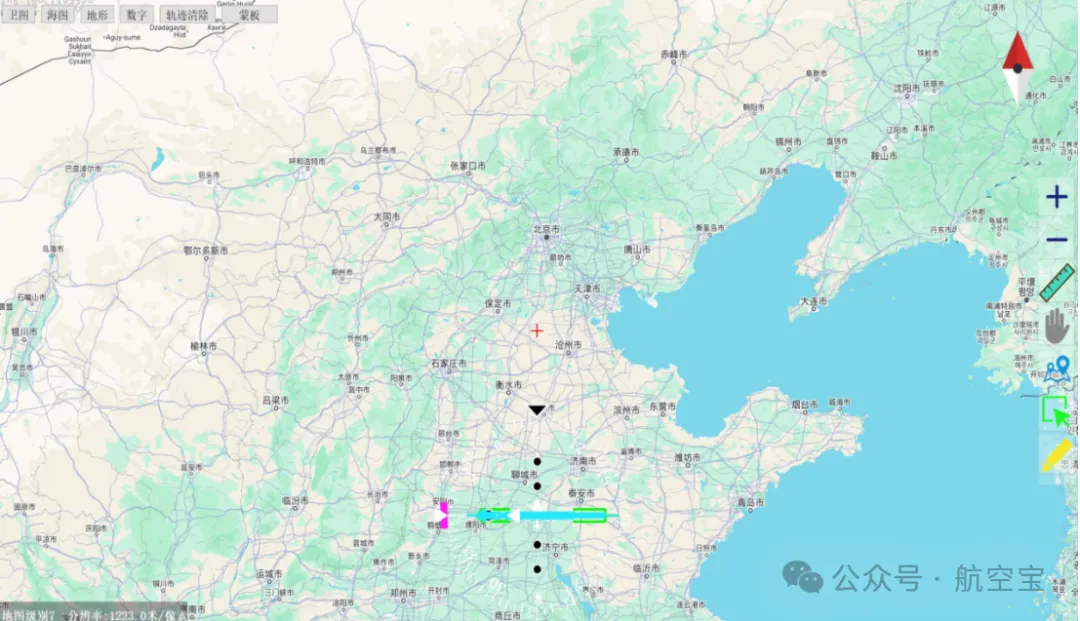
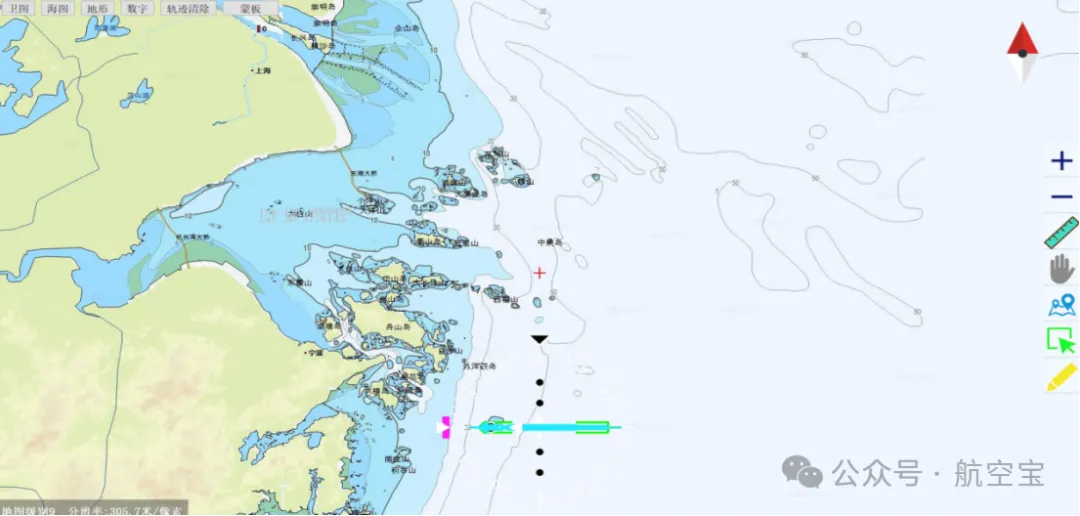
航路规划与编辑
航路规划与编辑是本态势引擎的核心功能之一,专为无人机、舰船、地面车辆等需要精确路径规划的作战单元设计。该功能提供直观的图形化操作界面,支持用户在真实地理底图上快速创建、编辑及管理复杂任务航线。
用户可直接通过鼠标在地图上点击,依次添加航路点。引擎会自动生成带有编号的航点,并实时以醒目的绿色连线与带有序号的圆形标记连接各点,形成完整航线。左侧航路编辑窗口同步支持精确参数设置,展示每个航点的详细参数,包括:
- 精确坐标(经纬度)
- 飞行高度(可精确设定每个点的高度值)
- 动作指令(可为每个航点配置悬停、拍照、投送等指令)
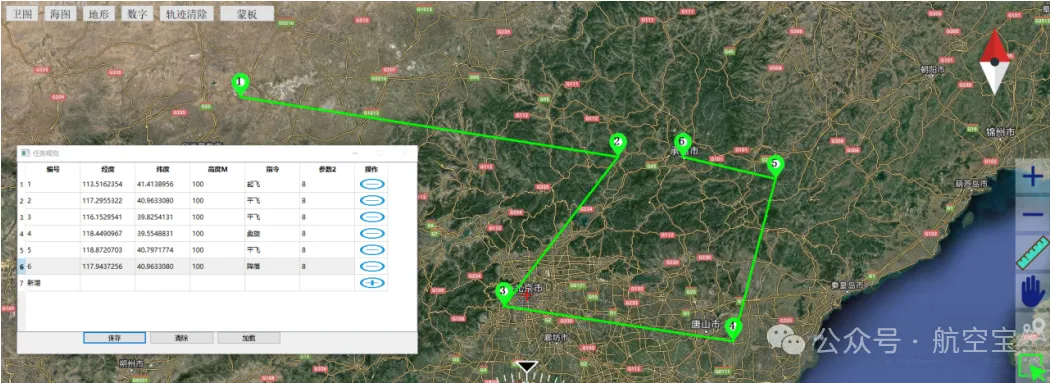
- 一键清除:提供“轨迹清除”功能,可快速清空当前规划的整个航路,便于重新规划。
- 蒙版叠加:支持开启“蒙板”功能,改变地图的整体色调和氛围,适应夜间任务规划或特定的视觉需求,减轻长时间操作的视觉疲劳。
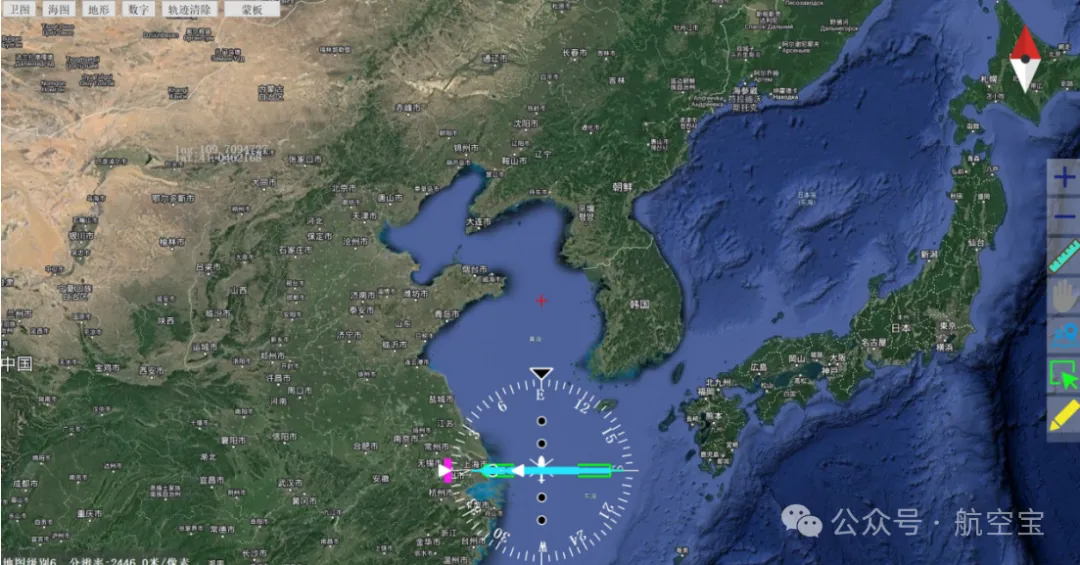
- 全局态势感知:规划时,界面右上角提供方向指示罗盘(指北针),帮助用户始终保持正确的方位感。在真实的区域地图上进行规划,确保了航线对现实地理环境的适应性。
规划好的航路可保存为任务想定,或通过通信模块直接下发至对应的作战单元执行。此项功能广泛应用于无人机侦察、巡航导弹航路规划、舰艇巡逻航线制定等多种场景,是实现自动化任务执行的关键环节。
地图数据管理
本引擎提供专业、高效的数据管理功能,确保海量地图数据的有序组织、快速调用和便捷移植,满足内网离线环境下对数据安全性和系统稳定性的高要求。引擎采用清晰、逻辑化的目录结构对多源地图数据进行分类存储和管理,软件自动将不同来源的地图数据存放在独立的文件夹中,每个地图类型文件夹都配有对应的配置文件,明确说明数据来源、坐标系、版本等关键信息,方便用户识别和管理,这种结构化的管理方式使得数据组织清晰明了,极大简化了数据维护、更新和系统迁移的复杂度。
| 序号 |
文件名称 |
说明 |
备注 |
| 1 |
SatelliteGCJ02 |
存储卫星影像数据 |
|
| 2 |
TopographicGCJ02 |
存储地形图数据 |
|
| 3 |
NauticalChartGCJ02 |
存储海图数据 |
|
| 4 |
DigitalGCJ02 |
存储数字地图数据 |
|
MBTiles格式规范:地图数据按不同分辨率等级,分别存储在以数字编号命名的MBTiles文件中。
标准化协议支持:该格式遵循开放地理空间联盟相关规范,是一种轻量级、高度可移植的地图数据存储格式。
技术优势:
- 高效读取:基于SQLite数据库实现,支持快速随机访问,显著提升地图加载效率。
- 跨平台兼容:采用独立文件格式,确保数据在不同系统与设备间可无缝迁移与使用。
- 优化存储:采用金字塔式分级存储结构,可根据显示分辨率智能调用相应数据层级,有效节省存储与加载资源。
配置参数文件
本引擎创新性地引入参数配置文件功能,旨在为用户打造高效、便捷的参数管理解决方案。该功能支持将各类核心配置参数以结构化数据文件的形式永久存储,彻底告别传统手动设置的繁琐流程。
核心配置参数覆盖全面,包括但不限于:地理定位参数、资源路径配置、可视化开关、高级渲染设置等。
显示归中
在复杂的地图场景中探索时,我们常常会遇到“显示归中”的难题。当您使用鼠标或触控板长时间、大幅度地平移视图后,屏幕中央的定位点早已远离初始关注的区域。此时,整个视野变得陌生,难以直观判断当前视角的绝对位置坐标,也难以迅速找回最初的分析焦点。这种“失焦”状态不仅打断了工作流,更降低了空间分析的效率和信心。本引擎通过优化的交互设计,帮助用户快速回归关注区域。
二次开发
本引擎全部采用Qt开发,未使用第三方库和插件,提供全部源代码,便于用户进行深度的定制化开发与系统集成,满足特定业务场景下的复杂需求。
持续赋能
通过系统化的版本管理和持续赋能体系,确保产品始终保持技术领先性,同时为客户提供长期可靠的技术保障和价值增长。
如果您对自主可控、高性能的离线态势可视化解决方案感兴趣,欢迎在云栈社区的C/C++或后端架构板块,与更多开发者交流相关技术与实现方案。
 发表于 2026-1-25 17:28:35
|
查看: 258|
回复: 0
发表于 2026-1-25 17:28:35
|
查看: 258|
回复: 0
