报警代码表的查阅方法
在日常运维与维护FANUC机器人时,你是否仅仅看到一串“SRVO-XXX”代码就感到困惑?其实,报警代码背后隐藏着丰富的状态信息。要真正理解并快速解决问题,首先需要熟悉其报警分类与查阅方法。
FANUC机器人根据报警的严重程度,对机器人的运行状态会产生不同的影响。简单来说,报警越严重,系统介入的力度就越大。
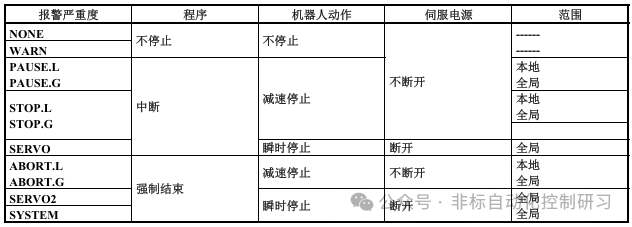
从上图可以清晰地看到,报警从轻到重分为NONE、WARN、PAUSE、STOP、SERVO、ABORT和SYSTEM等级别。它们直接决定了当前程序是否停止、机器人是否运动、伺服电源是否断开。
例如常见的 SRVO-001(操作面板紧急停止) 就属于ABORT级别,会导致机器人瞬时停止并断开伺服电源。
这里的“范围”说明也很重要:
- 本地:报警仅影响当前发生报警的那一个程序。
- 全局:报警会影响机器人上运行的所有程序。
理解了这个基础分类,我们就能对报警的紧急程度和影响范围有一个初步判断,这对于现场故障的初步诊断与处理至关重要。
报警代码的显示与查看
当报警发生时,机器人示教器面板上的报警LED灯会亮起,同时在屏幕的顶部状态栏会直接显示当前的报警代码。

上图顶部中央显示的 SRVO-037 IMSTP输入(group:1) 就是当前激活的报警信息。这给了操作者最直接的提示。
但如果需要查看更多信息,比如报警的详细描述或历史记录,就需要进入专门的报警画面。操作路径如下:
- 按下示教器的
[MENU] 键。
- 在菜单列表中选择“4 报警”。
- 此时会进入报警类型选择子菜单。

这里提供了几种不同的日志视图:
- 报警日志:记录所有的报警信息,最新的显示在最上面。这是我们最常用的排查视图。
- 动作日志:专门显示与机器人动作相关的报警历史。
- 系统日志:显示与系统本身相关的报警历史。
- 应用日志:显示与特定应用程序相关的报警历史。
- 通讯日志:仅显示通讯相关的报警历史。
选择“报警日志”,即可进入核心的报警信息界面。
深入报警日志画面
报警日志画面是我们进行故障分析的主战场。它直观地展示了当前正在发生的、未被解除的报警。

此界面只显示“活”的报警。一旦报警被复位或条件解除,它就会从该画面消失。你可以通过画面下方的 [类型]、[查看] 等按钮切换不同的显示和筛选模式。
如果想查看所有发生过的报警,包括已经处理掉的,就需要查看“报警履历”。

履历画面记录了历史的报警信息。需要注意的是:
- 它显示的是最后一次执行“报警清除”操作后发生的所有报警。
- 默认只显示严重程度为 PAUSE 及以上的报警,WARN、NONE级别的报警以及已“重置”的记录不显示。
- 可以通过修改系统变量
$ER_NOHIS 来改变这一显示策略。
- 当多个报警同时或连续发生时,按时间倒序排列,最多显示100条记录。
报警严重度的颜色标识
除了文字级别,FANUC系统还通过颜色来快速区分报警的严重性,这对于快速识别高危情况非常有效。通常在报警履历或特定显示模式下,代码会呈现不同颜色:
- 白色:表示 NONE 或 WARN 类报警,属于提示或轻微警告。
- 黄色:表示 PAUSE 或 STOP 类报警,需要操作员介入处理,机器人会停止。
- 蓝色:通常表示“重置”操作或如 SYST-026(系统正常启动) 这类状态信息。
- 红色:表示 SERVO、ABORT 或 SYSTEM 类严重报警,通常涉及安全或硬件故障,需要立即处理。
颜色警报与停止方式(减速停止/瞬时停止)相结合,构成了一个立体的报警响应体系,帮助工程师在第一时间做出正确反应。
报警自动显示功能
类似于我们在上位机HMI中设置的报警弹窗,FANUC机器人也具备“报警自动显示”功能。当发生严重程度在 PAUSE 及以上的报警时,系统可以自动弹出报警画面,强制引起操作者注意。
然而,这个功能在出厂标准设置中是 无效 的。如果需要启用,必须手动修改一系列系统变量。
你可以针对每一种报警严重级别,单独设定其自动显示功能是否有效。像NONE、WARN这类不影响执行的报警,通常不设为自动显示。而对于PAUSE及以上级别的报警,一般建议设为有效。

关键的几个系统变量是 $SER_SEV_NOAUTO[1] 到 $SER_SEV_NOAUTO[4],它们分别对应PAUSE、STOP、SERVO、ABORT这四个级别。
TRUE:表示该级别的报警发生时,自动显示功能有效。FALSE:表示该级别的报警发生时,自动显示功能无效。
合理配置这些参数,可以显著提升设备异常时的响应效率,是优化运维流程的一个小技巧。
总结来看,从看懂一个简单的报警代码,到利用日志进行深度排查,再到配置个性化的提示功能,FANUC机器人的报警系统设计得相当完善。掌握这些“未知的细节”,无疑能让你在应对设备故障时更加得心应手。希望这篇指南能为你带来帮助,也欢迎在技术社区分享你的实践心得,例如在云栈社区与更多同行交流工业自动化的运维经验。
 发表于 2026-2-13 07:42:16
|
查看: 523|
回复: 0
发表于 2026-2-13 07:42:16
|
查看: 523|
回复: 0
