在嵌入式开发中,输出日志(Log)是定位问题、理解程序运行状态的核心手段。串口(UART)输出是最常见的方法,因其实现简单且多数芯片都支持。然而,在某些特定场景下,依赖串口输出Log会遇到瓶颈:
- 拿到一款新芯片,其串口驱动尚未调通时,如何查看Log?
- 一些对时序极其敏感的操作(如USB枚举过程),串口输出占用时间过长怎么办?
- 某些Bug仅在特定条件下复现,一旦连接串口输出Log就“消失”了,如何捕捉?
- 在引脚受限的封装中,串口已被复用为其他功能,或无串口外设时,如何输出Log?
针对这些实际开发中的痛点,本文将基于STM32F407平台,详细介绍四种不依赖(或部分阶段不依赖)串口的Log输出方案,并附上代码实现。
1. 输出Log信息到SRAM(内存调试法)
严格来说,这种方法并非“输出”,而是将Log暂存于芯片的SRAM中,待操作结束后通过仿真器(如J-Link、ST-LINK)直接查看内存区域。这尤其适用于无法打断点或断点会影响关键流程的调试场景。
首先,我们定义一个管理Log缓冲区的结构体:
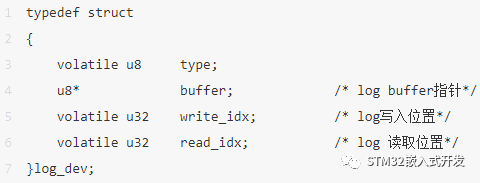
接着,在SRAM中开辟一块区域作为环形缓冲区(Ring Buffer):
static u8 log_buffer[LOG_MAX_LEN];
环形缓冲区的优势在于,用较小的空间即可实现“无限”打印,但其缺点也显而易见:如果Log未被及时提取,就会被后续的Log覆盖。缓冲区大小可根据芯片SRAM容量灵活设置,此处示例为1KB。
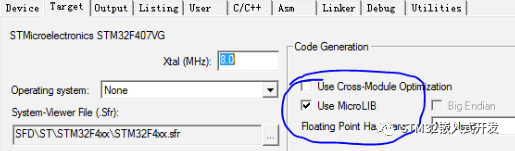
为了能方便地使用printf进行格式化输出,需要在开发环境(以Keil为例)中进行如下配置,并勾选“Use MicroLIB”:
同时,在代码中包含#include <stdio.h>,并重定向fputc函数,使其指向我们自定义的写入函数:
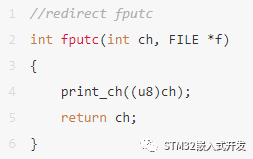
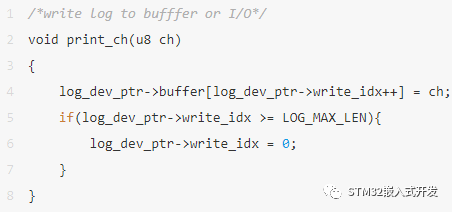
print_ch函数负责将字符写入SRAM缓冲区:
为了更灵活地控制Log的打印(例如方便地全局关闭调试信息),可以封装一个自定义的宏:
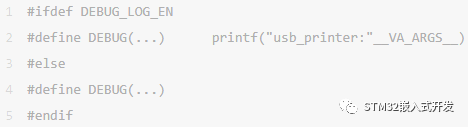
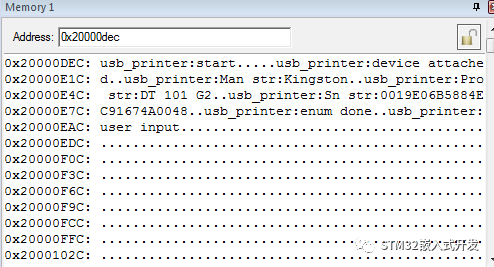
在需要打印Log的地方调用DEBUG()宏即可。程序运行后,便可在IDE的Memory窗口中看到存储在指定地址的Log信息:
这种方法简单有效,但缺点是在调试量较大时,可能来不及查看,Log就被覆盖了。为此,我们可以引入更实时的方法。
2. 通过SWO(Serial Wire Output)输出Log
SWO是ARM Cortex-M内核芯片自带的一种调试组件,它通过SWD接口的另一条线(SWO)输出数据,完全不占用CPU时间,也无需担心缓冲区被覆盖。
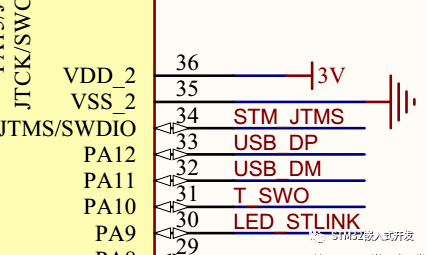
首先需确认硬件连接,在STM32F407 Discovery板上,SWO引脚已连接至ST-LINK,原理图如下:
我们在Log设备结构体中扩展一个函数指针集,用于支持多种输出方式(如SWO、UART):
typedef struct {
u8 (*init)(void* arg);
u8 (*print)(u8 ch);
u8 (*print_dma)(u8* buffer, u32 len);
} log_func;
typedef struct {
volatile u8 type;
u8* buffer;
volatile u32 write_idx;
volatile u32 read_idx;
//SWO
log_func* swo_log_func;
} log_dev;
SWO的输出函数实现非常简单,直接调用Coretex-M的ITM接口函数:
u8 swo_print_ch(u8 ch)
{
ITM_SendChar(ch);
return 0;
}
我们可以选择将Log先存入缓冲区,然后在系统空闲时(如在主循环中)调用输出函数输出,以平衡实时性与对代码执行时间的影响。
/*output log buffer to I/O*/
void output_ch(void) {
u8 ch;
volatile u32 tmp_write,tmp_read;
tmp_write = log_dev_ptr->write_idx;
tmp_read = log_dev_ptr->read_idx;
if(tmp_write != tmp_read) {
ch = log_dev_ptr->buffer[tmp_read++];
//swo
if(log_dev_ptr->swo_log_func)
log_dev_ptr->swo_log_func->print(ch);
if(tmp_read >= LOG_MAX_LEN) {
log_dev_ptr->read_idx = 0;
} else {
log_dev_ptr->read_idx = tmp_read;
}
}
}
2.1 通过IDE(Keil/IAR)查看SWO Log
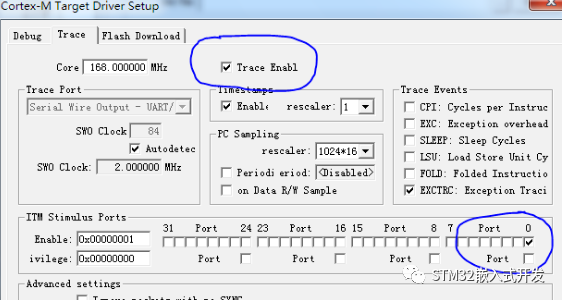
在Keil中需要配置调试器,启用Trace并设置正确的SWO时钟:
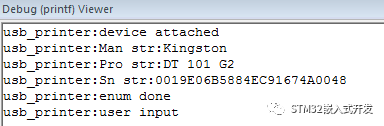
配置完成后,运行程序即可在Debug (printf) Viewer窗口中看到实时输出的Log:
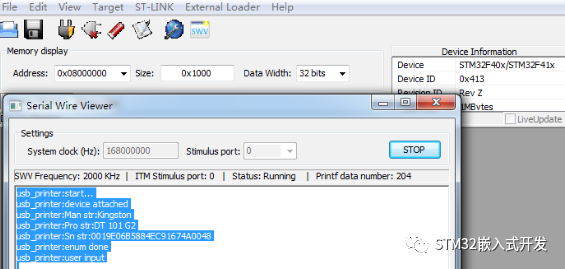
2.2 通过STM32 ST-LINK Utility查看SWO Log
使用ST官方工具STM32 ST-LINK Utility则更为直接,打开“Printf via SWO viewer”窗口并启动即可:
SWO输出非常高效,但它依赖于调试器连接。对于需要长期运行或在现场进行调试的场景,我们仍需要串口方案。
3. 通过串口输出Log(含DMA优化)
前两种方法更多用于开发调试阶段,产品长期运行或现场调试,串口仍是可靠的选择。我们只需在设备结构体中增加串口的函数集:
typedef struct {
volatile u8 type;
u8* buffer;
volatile u32 write_idx;
volatile u32 read_idx;
volatile u32 dma_read_idx;
//uart
log_func* uart_log_func;
//SWO
log_func* swo_log_func;
} log_dev;
实现串口初始化及打印函数:
但串口输出速度慢(尤其在高波特率下仍可能成为瓶颈),长时间输出会严重阻塞CPU。为解决此问题,我们可以利用DMA(直接内存访问)技术。让DMA自动将内存中的Log数据搬运到串口发送寄存器,而CPU在此期间可以处理其他任务。
串口及DMA的初始化配置如下(以USART2, DMA1 Stream6 Channel4为例):
u8 uart_log_init(void* arg) {
DMA_InitTypeDef DMA_InitStructure;
u32* bound = (u32*)arg;
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART2时钟
//串口2对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2);
//USART2端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure);
//USART2初始化设置
USART_InitStructure.USART_BaudRate = *bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口1
#ifdef LOG_UART_DMA_EN
USART_DMACmd(USART2,USART_DMAReq_Tx,ENABLE);
#endif
USART_Cmd(USART2, ENABLE); //使能串口1
USART_ClearFlag(USART2, USART_FLAG_TC);
while (USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
#ifdef LOG_UART_DMA_EN
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA1, ENABLE);
//Config DMA channel, uart2 TX usb DMA1 Stream6 Channel
DMA_DeInit(DMA1_Stream6);
DMA_InitStructure.DMA_Channel = DMA_Channel_4;
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)(&USART2->DR);
DMA_InitStructure.DMA_DIR = DMA_DIR_MemoryToPeripheral;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(DMA1_Stream6, &DMA_InitStructure);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA1, ENABLE);
#endif
return 0;
}
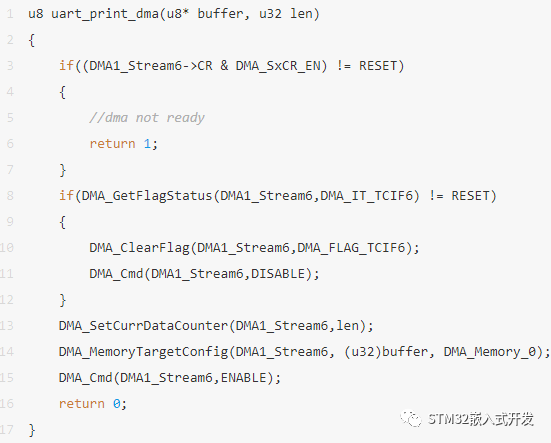
DMA发送函数负责启动传输,示例中为查询方式,实际可改为中断方式以提高效率:
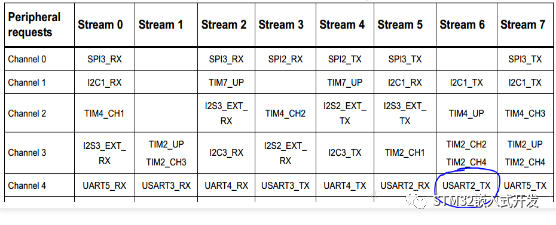
根据STM32F4的Datasheet,可以查到USART2_TX对应DMA1 Stream6 Channel4:
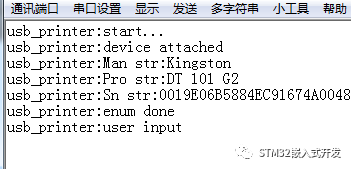
最终,在PC端的串口助手可以接收到清晰的Log输出:
使用DMA输出串口Log对系统性能影响最小,且能保证及时性,是实际项目中最推荐的方式。此思路也可扩展至SPI、USB等其他支持DMA的外设。
4. 使用普通IO口模拟串口输出Log
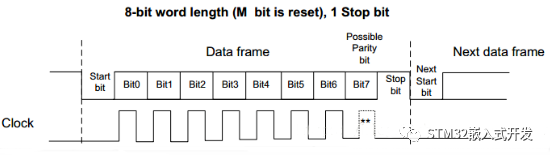
最后一种方法适用于没有空闲串口或芯片封装无串口外设的极端情况。其原理是利用一个普通GPIO,通过精准的时序模拟UART协议波形。标准UART帧格式如下:
模拟的关键在于精确的比特延时,这需要借助定时器。以下代码使用TIM4产生1us基准延时(注意避免定时器冲突):
u8 simu_log_init(void* arg) {
TIM_TimeBaseInitTypeDef TIM_InitStructure;
u32* bound = (u32*)arg;
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_SetBits(GPIOA, GPIO_Pin_2);
//Config TIM
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); //使能TIM4时钟
TIM_DeInit(TIM4);
TIM_InitStructure.TIM_Prescaler = 1; //2分频
TIM_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_InitStructure.TIM_Period = 41; //1us timer
TIM_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM4, &TIM_InitStructure);
TIM_ClearFlag(TIM4, TIM_FLAG_Update);
baud_delay = 1000000/(*bound); //根据波特率计算每个bit延时
return 0;
}
精准延时函数:
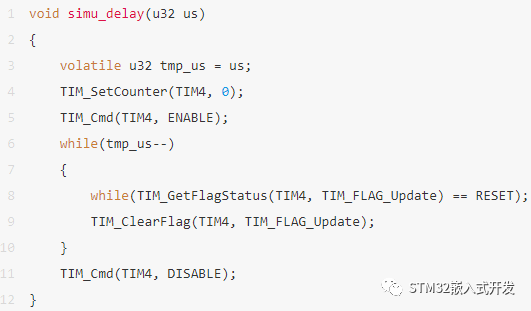
模拟发送函数。特别注意:在波形生成期间必须关闭中断,发送完毕后再打开,否则时序会被打断导致乱码。
u8 simu_print_ch(u8 ch) {
volatile u8 i=8;
__asm("cpsid i");
//start bit
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
simu_delay(baud_delay);
while(i--) {
if(ch & 0x01)
GPIO_SetBits(GPIOA, GPIO_Pin_2);
else
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
ch >>= 1;
simu_delay(baud_delay);
}
//stop bit
GPIO_SetBits(GPIOA, GPIO_Pin_2);
simu_delay(baud_delay);
simu_delay(baud_delay);
__asm("cpsie i");
return 0;
}
这种方法仅需一个IO口,在小封装或资源极度受限的场合非常实用,是实现“无串口”打印Log的终极软件方案。
总结
本文探讨了在STM32嵌入式开发中,应对不同场景的四种Log输出方案:
- SRAM暂存法:适用于驱动未就绪或严禁打断的初调阶段。
- SWO输出法:利用内核调试组件,无损耗、实时性高,依赖调试器。
- 串口DMA输出法:平衡性能与便利性的最佳长期方案,对系统影响小。
- IO模拟串口法:在无硬件串口情况下的应急解决方案,仅需一个GPIO。
掌握这四种方法,能够让你在各种复杂的嵌入式调试环境中游刃有余。希望这些实践性的C语言代码和思路能对你的项目有所帮助。如果你有更多嵌入式调试的技巧或想法,欢迎在云栈社区与其他开发者交流探讨。
 发表于 2026-2-21 03:41:07
|
查看: 219|
回复: 0
发表于 2026-2-21 03:41:07
|
查看: 219|
回复: 0
