最近,我入手了一个损坏的MIT Mini Cheetah(迷你猎豹)机器人关节执行器,决定将其拆开一探究竟。这款由麻省理工学院仿生机器人实验室研发的四足机器人,以其小巧灵活和坚固耐用著称,能够承受高强度的跌落和意外冲击。其高速高扭矩的执行器,正是赋予机械狗奔跑、跳跃乃至后空翻能力的关键。

执行器拆解概览
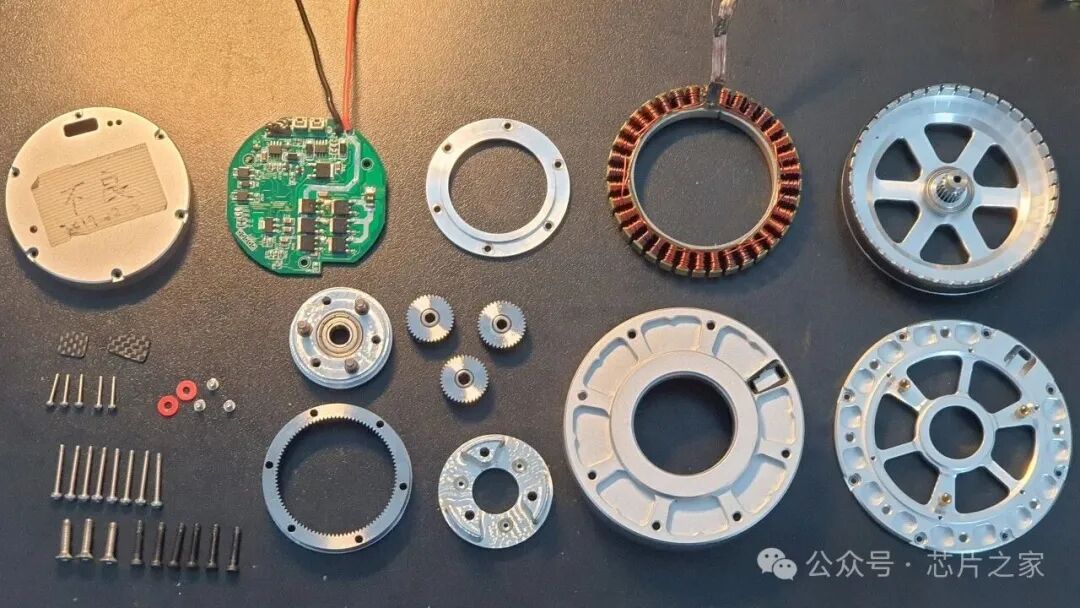
首先,来看看所有拆解出来的部件全家福。
控制电路板分析
我们先来看控制部分。PCB的背面设计相当简洁,其主控MCU选用了经典的 STM32F103C8T6,这多少有些让人意外,看来实现机械狗的磁场定向控制(FOC)算法,也并不一定需要非常高端的微控制器。电流检测仅通过一个低侧分流电阻完成,电机线则直接焊接在MOSFET的引脚上。
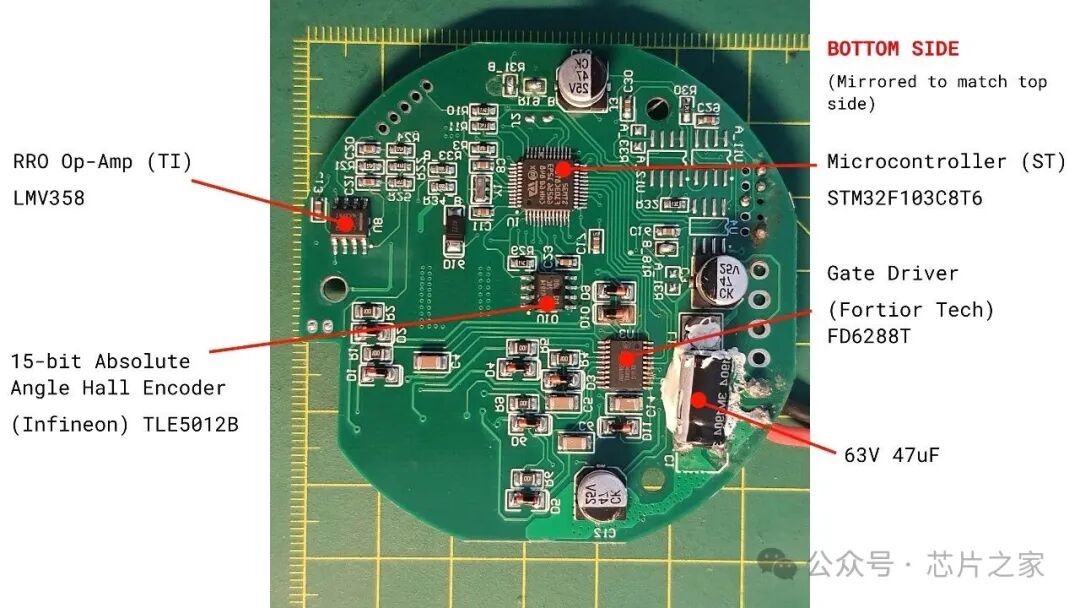
电机预驱动芯片型号为FD6288T。电路板正中心集成了一个15位高精度的绝对角度霍尔编码器,用于实时获取电机转子的精确位置。
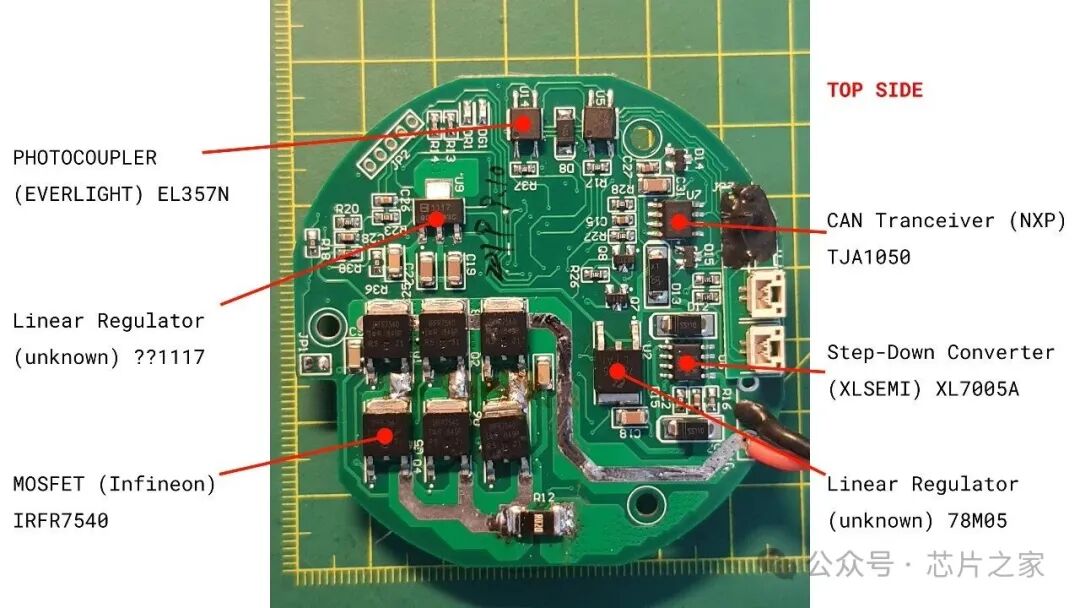
转到PCB正面,我们可以看到两个光耦、两个LDO线性稳压器、6个MOSFET、一个DC-DC降压转换器,以及一个CAN总线收发器。这个CAN接口对于实现多个执行器之间的动作同步至关重要。
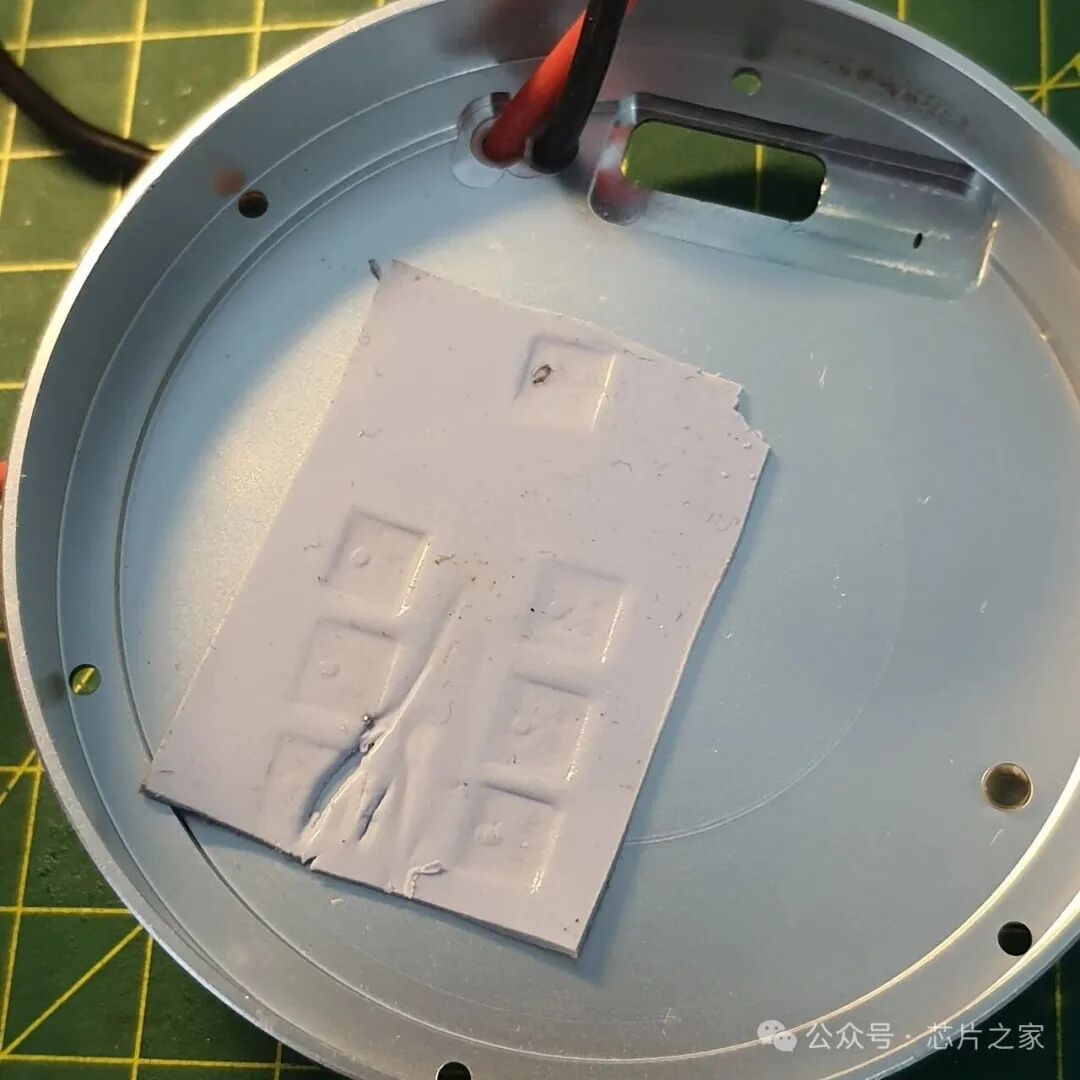
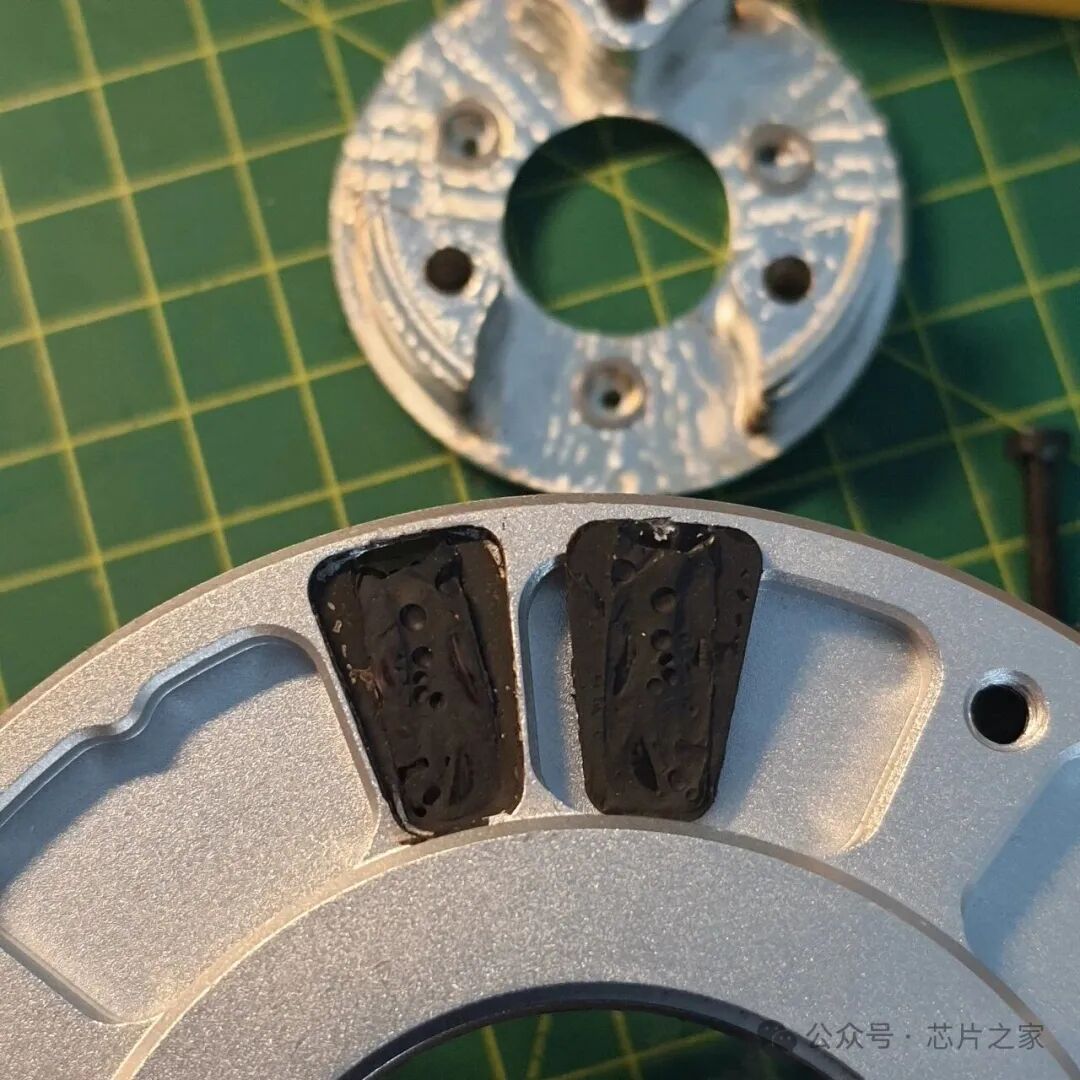
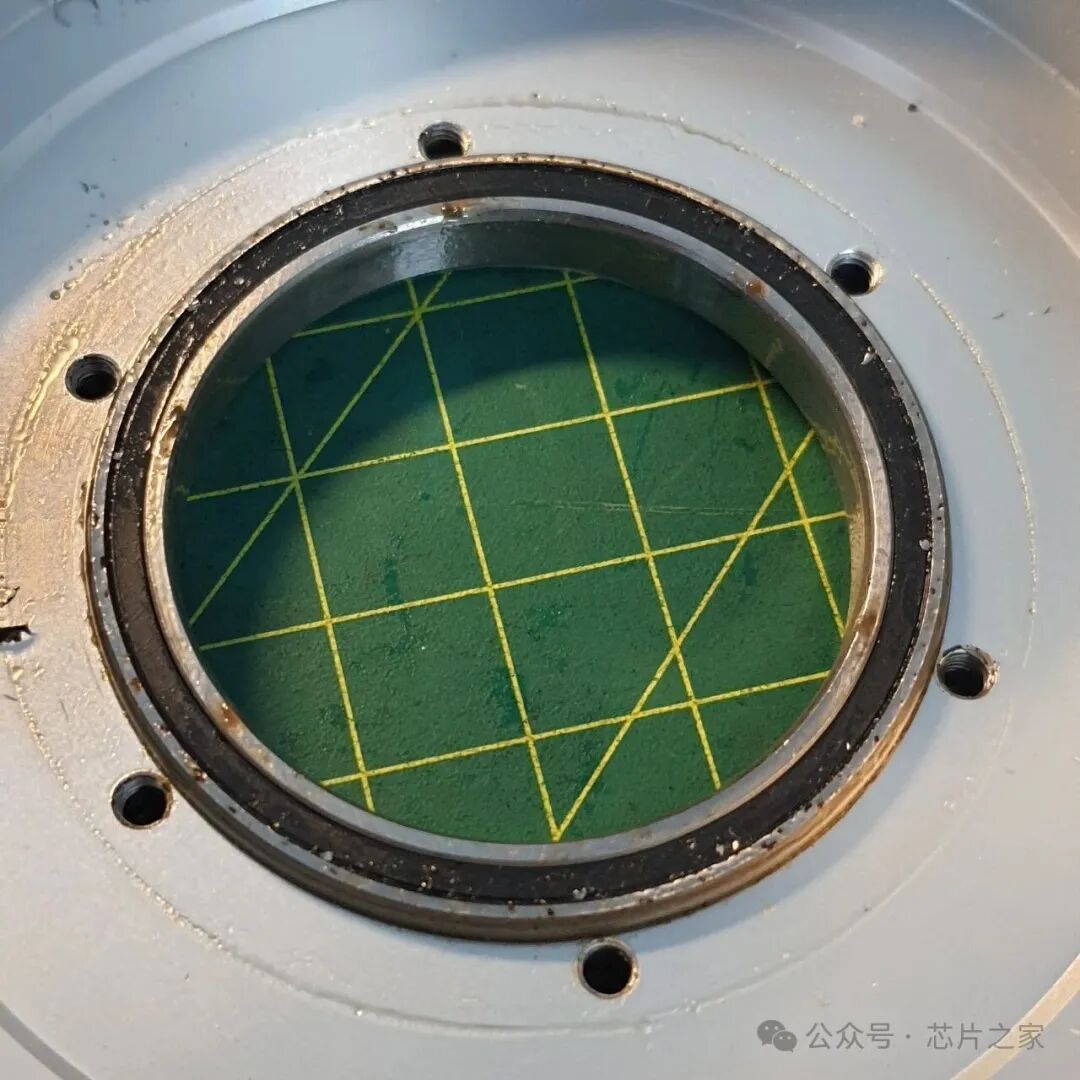
电机的后盖内侧贴有导热硅脂垫,主要用于为MOSFET进行辅助散热。
机械结构拆解
接下来是重头戏——机械部分的拆解。电机的顶壳设计得非常紧密,几乎没有可供着力的固定点,且边缘锋利。为了避免损坏零件,只能用绳子小心地将其拽开。在撬开之前,需要先移开一块碳纤维板,以防损伤内部的线路。


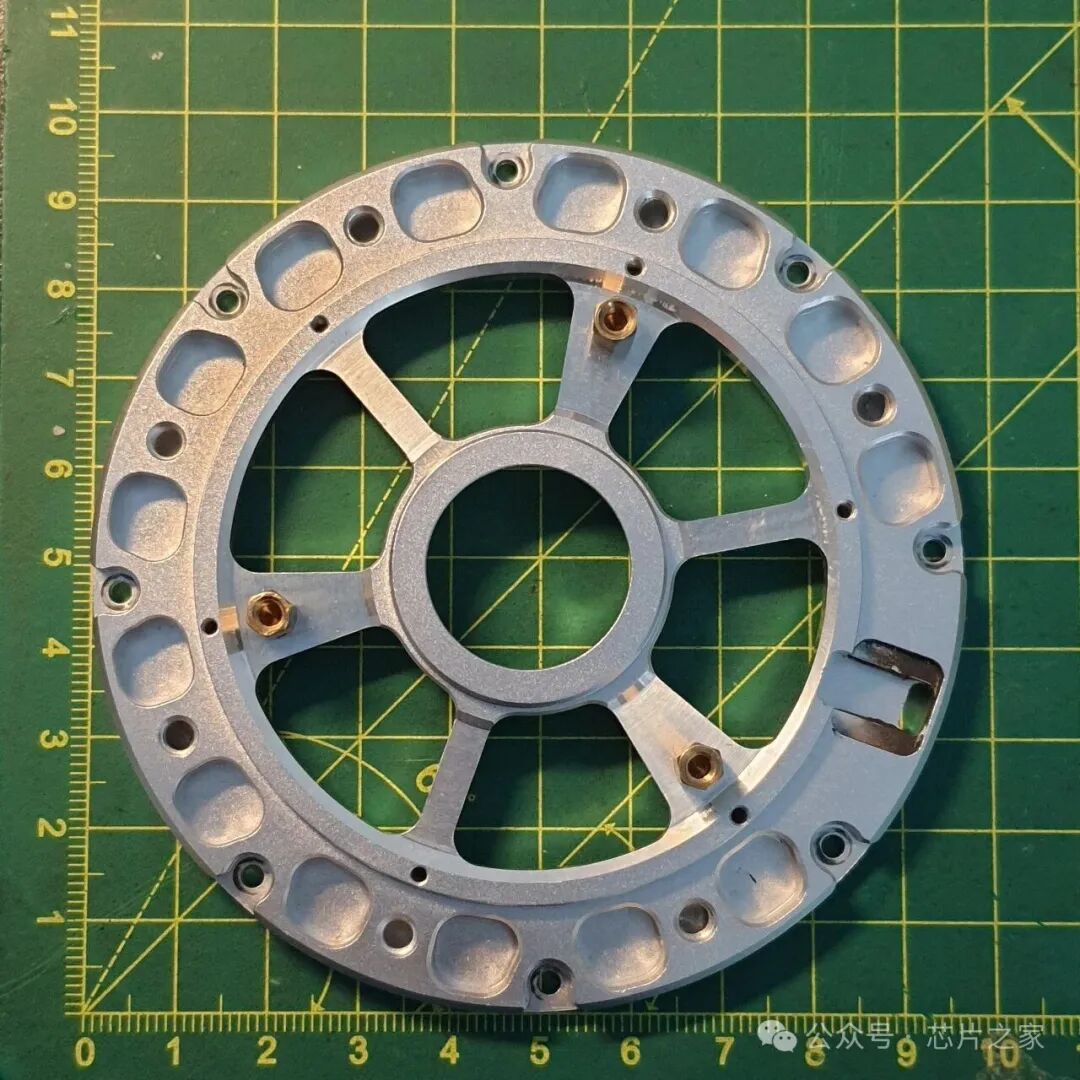
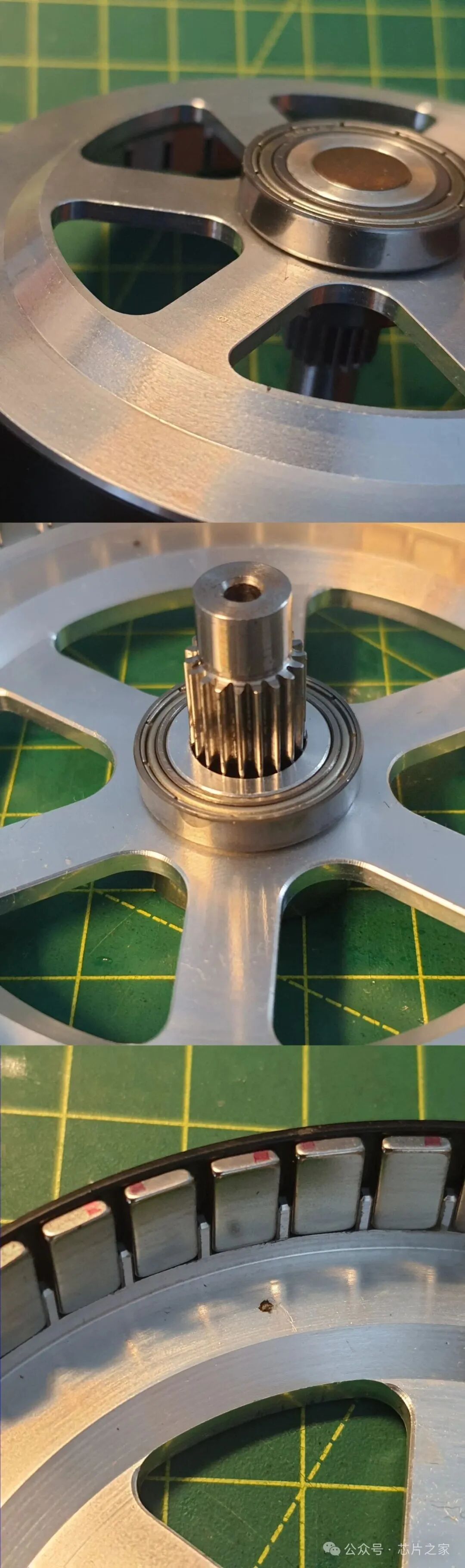
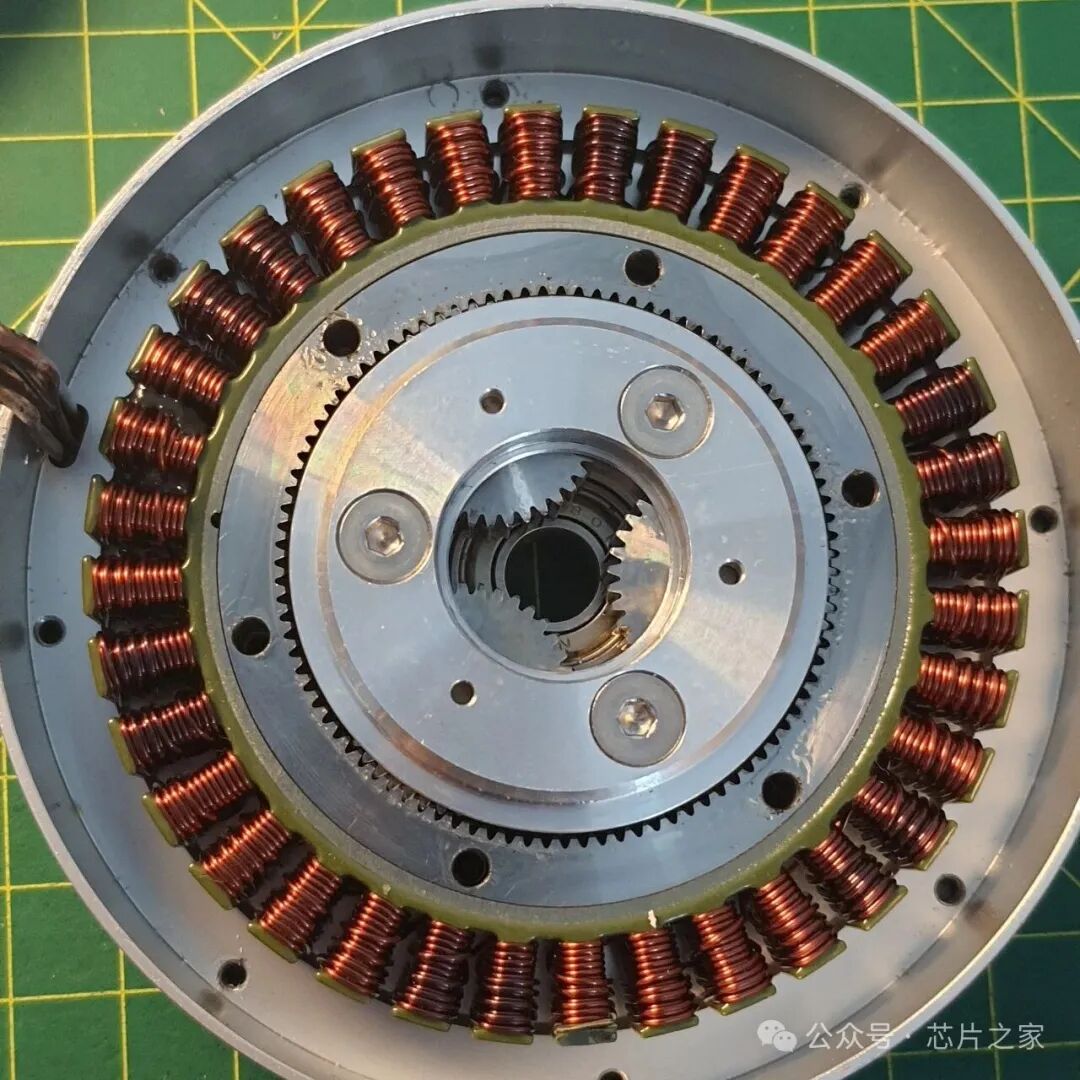
顶壳移除后,便可以将转子部分推出。转子上一共嵌有42块磁铁,与之啮合的齿轮则有19个齿。


整个行星齿轮减速机构都被巧妙地集成在电机定子内部,大大节省了空间。

继续深入拆解。这里需要用一颗M4螺栓临时固定一下,因为在拧下最后一颗螺丝时,输出轴可能还会转动。之后,找一根长螺丝从后方插入,就能将整个输出轴壳体顶出来。

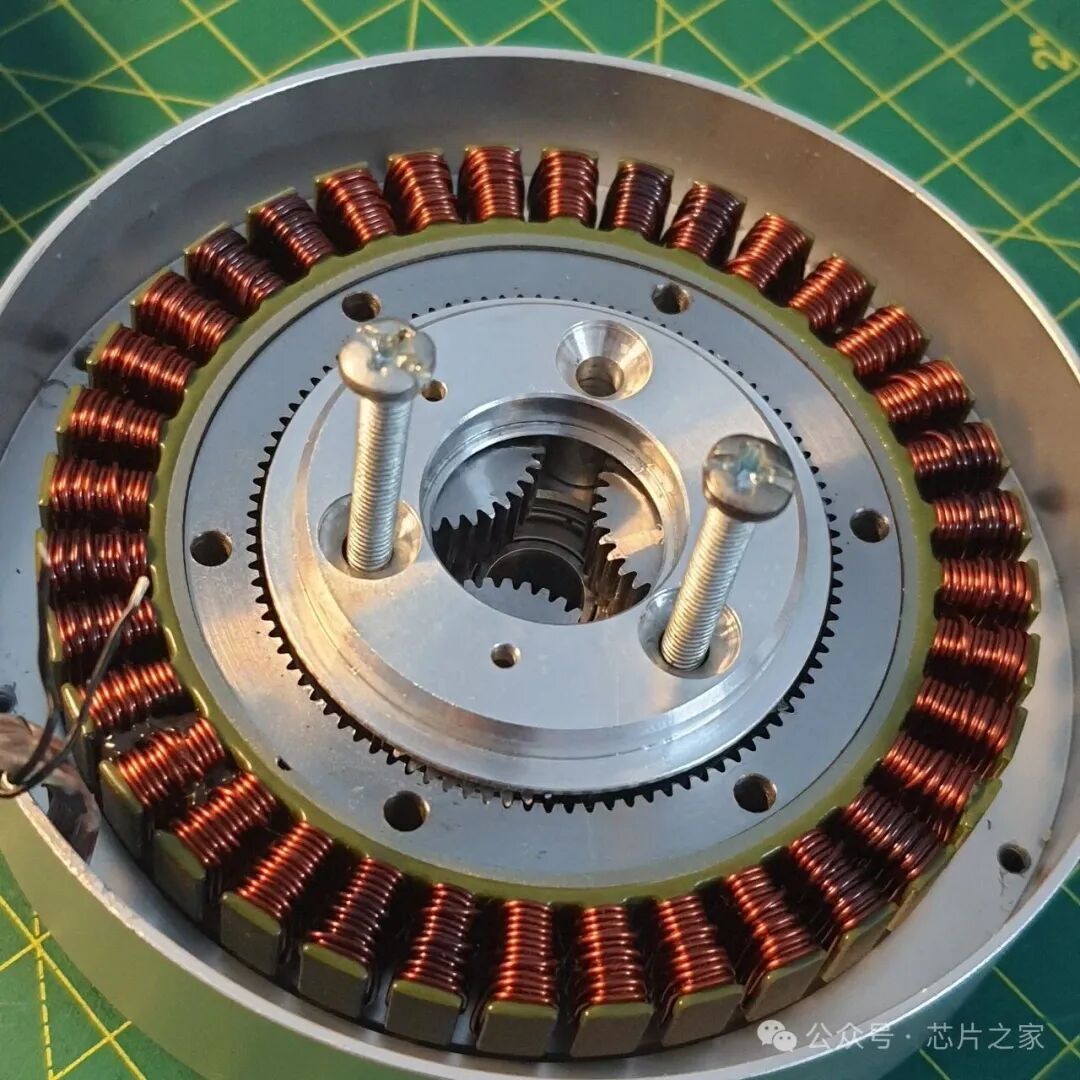
行星齿轮本身有38个齿,并且采用了滚针轴承而非常见的滚珠轴承。外部的环形齿轮则有95个齿。由此计算出的减速比为1:6,这样的设计既能提供较高的输出扭矩,又保留了必要的反向驱动能力(即外力可以反推电机转动)。
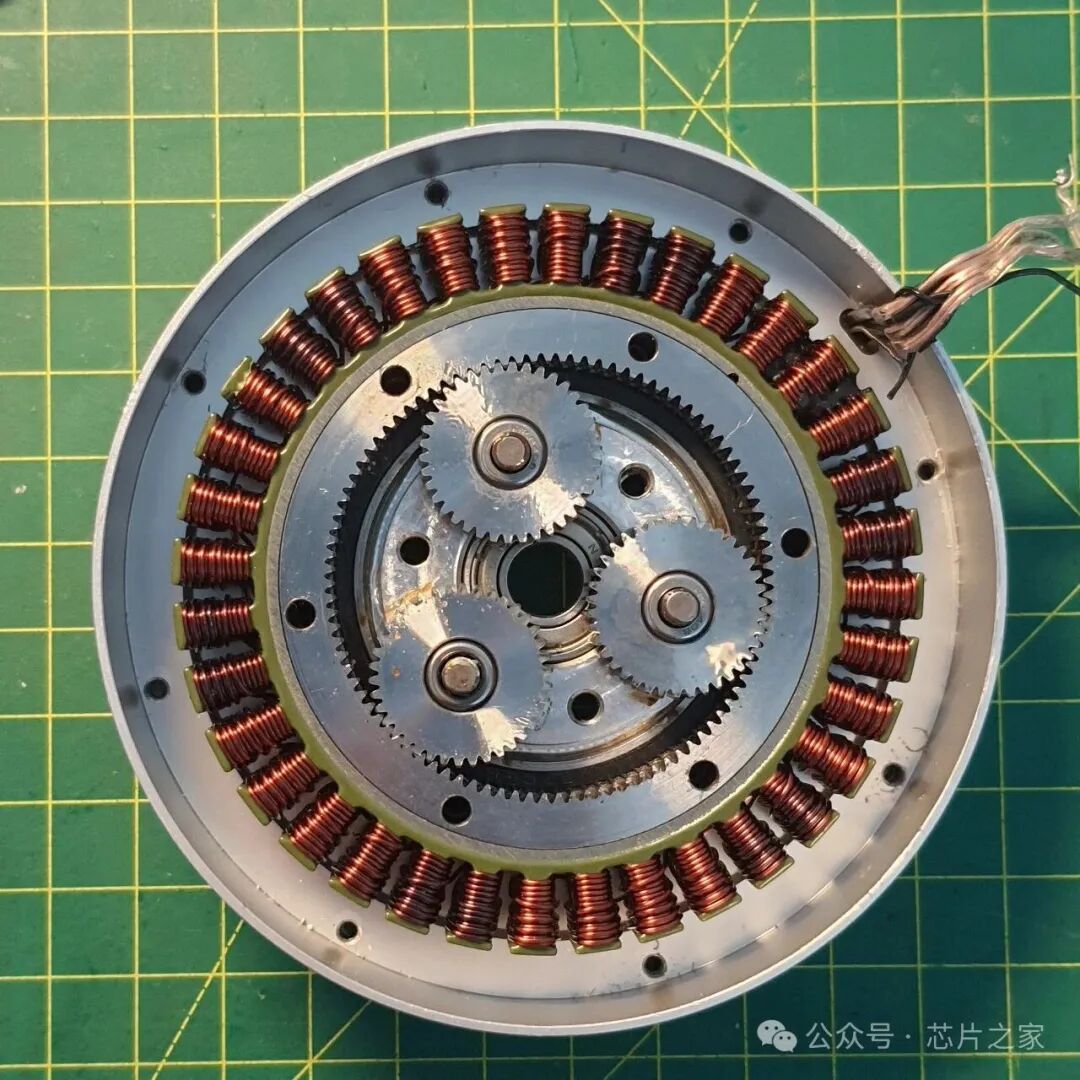

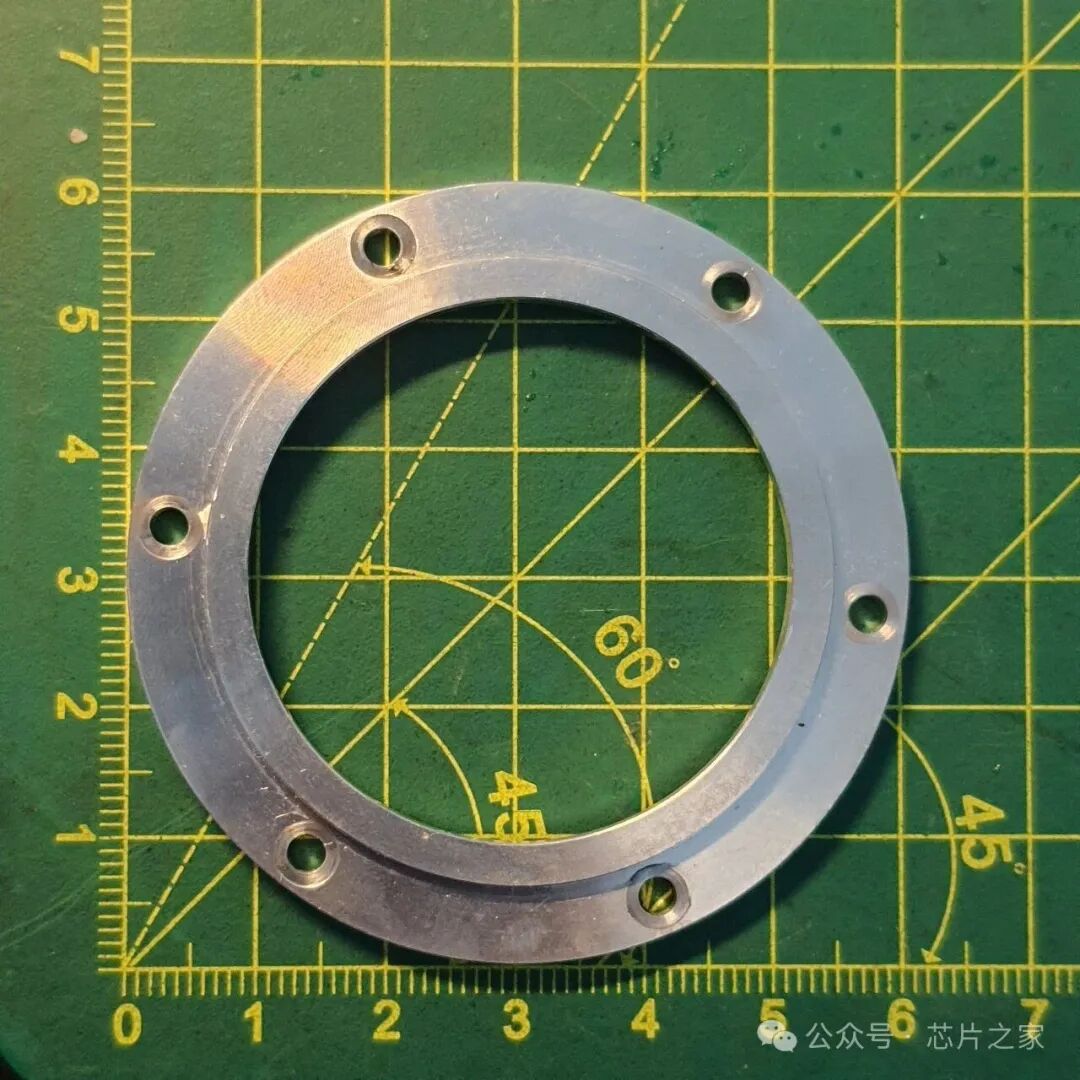
这是行星齿轮架和输出轴组件。




在这个位置插入一把小号的一字螺丝刀,可以撬开前端的碳纤维板,从而取出电机绕组引线。
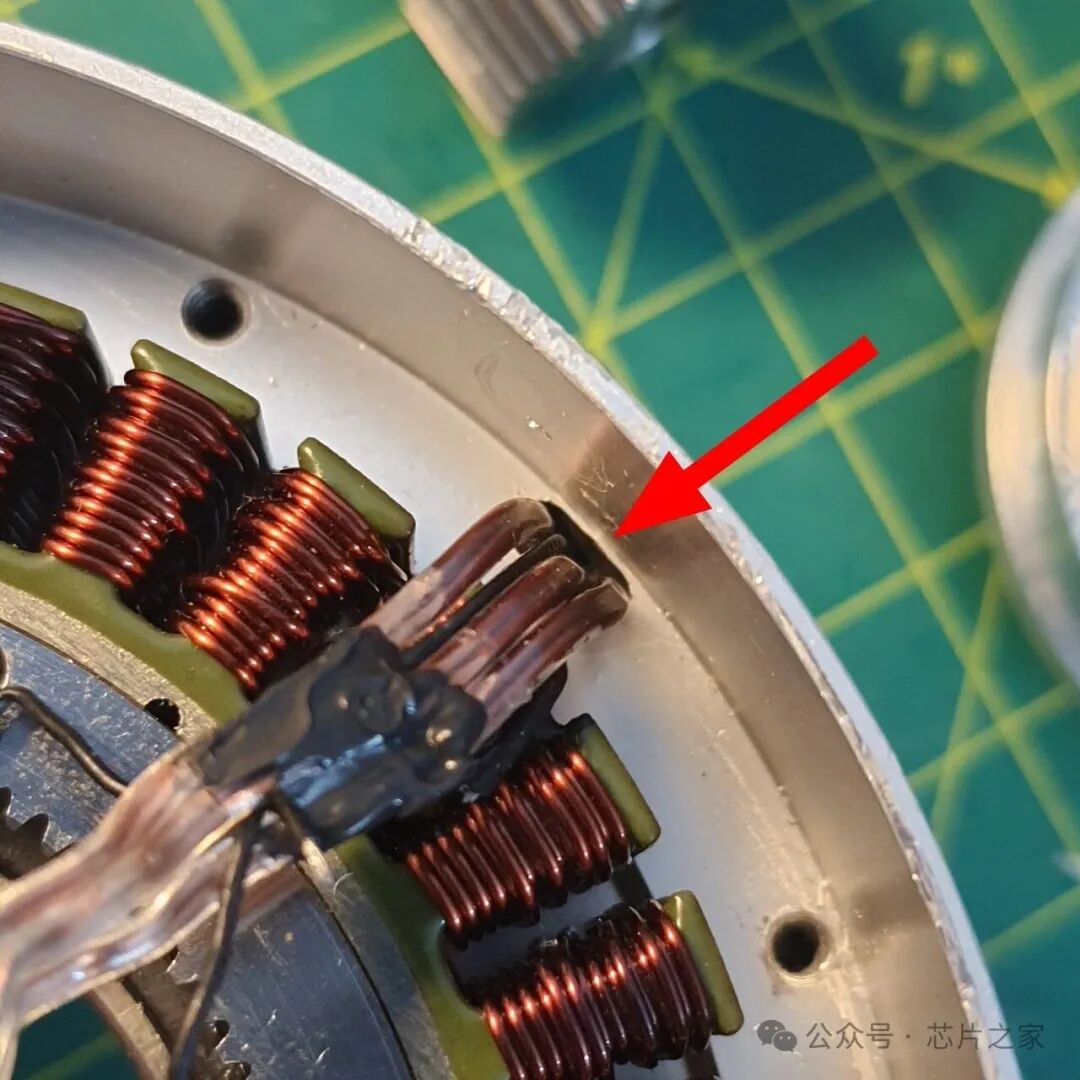
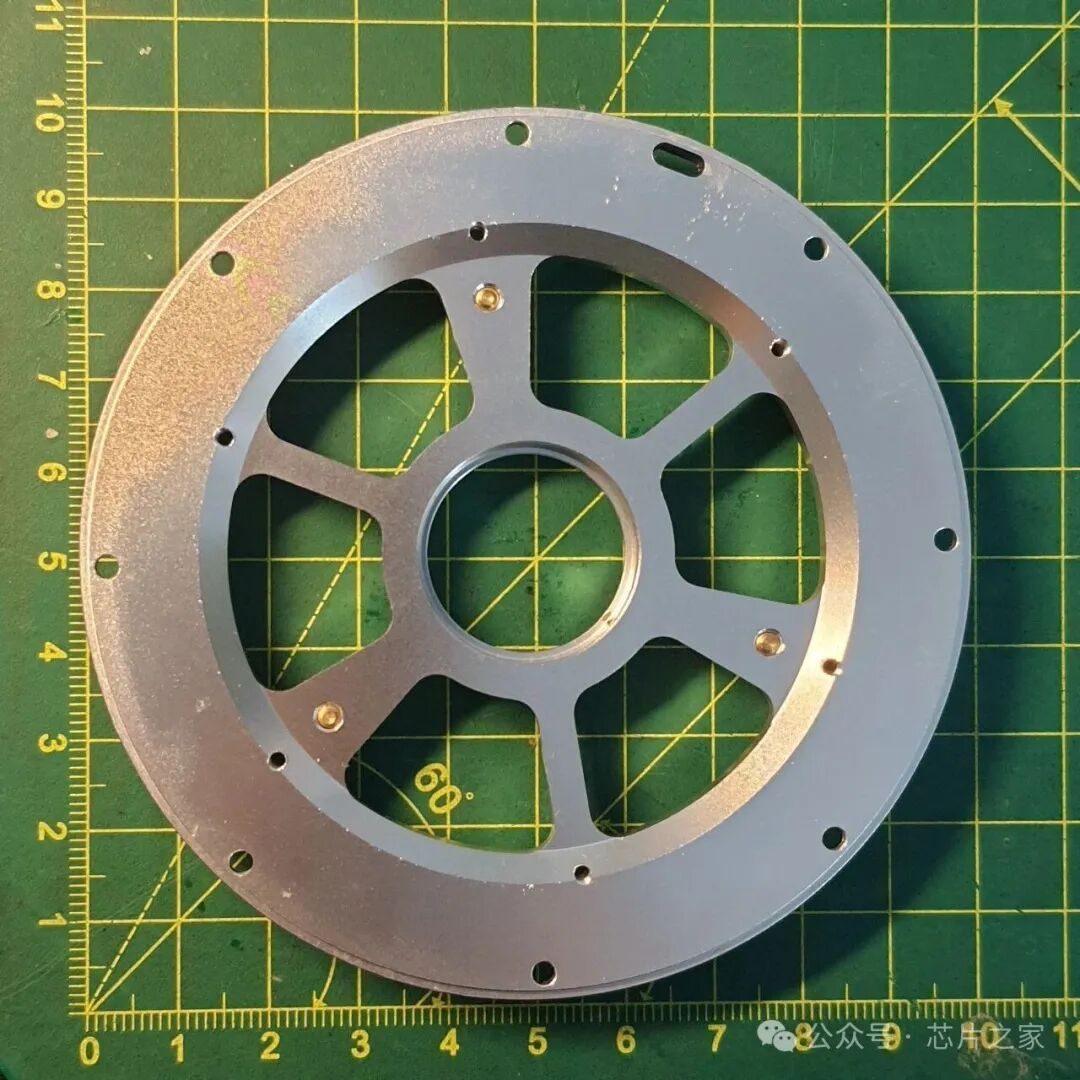
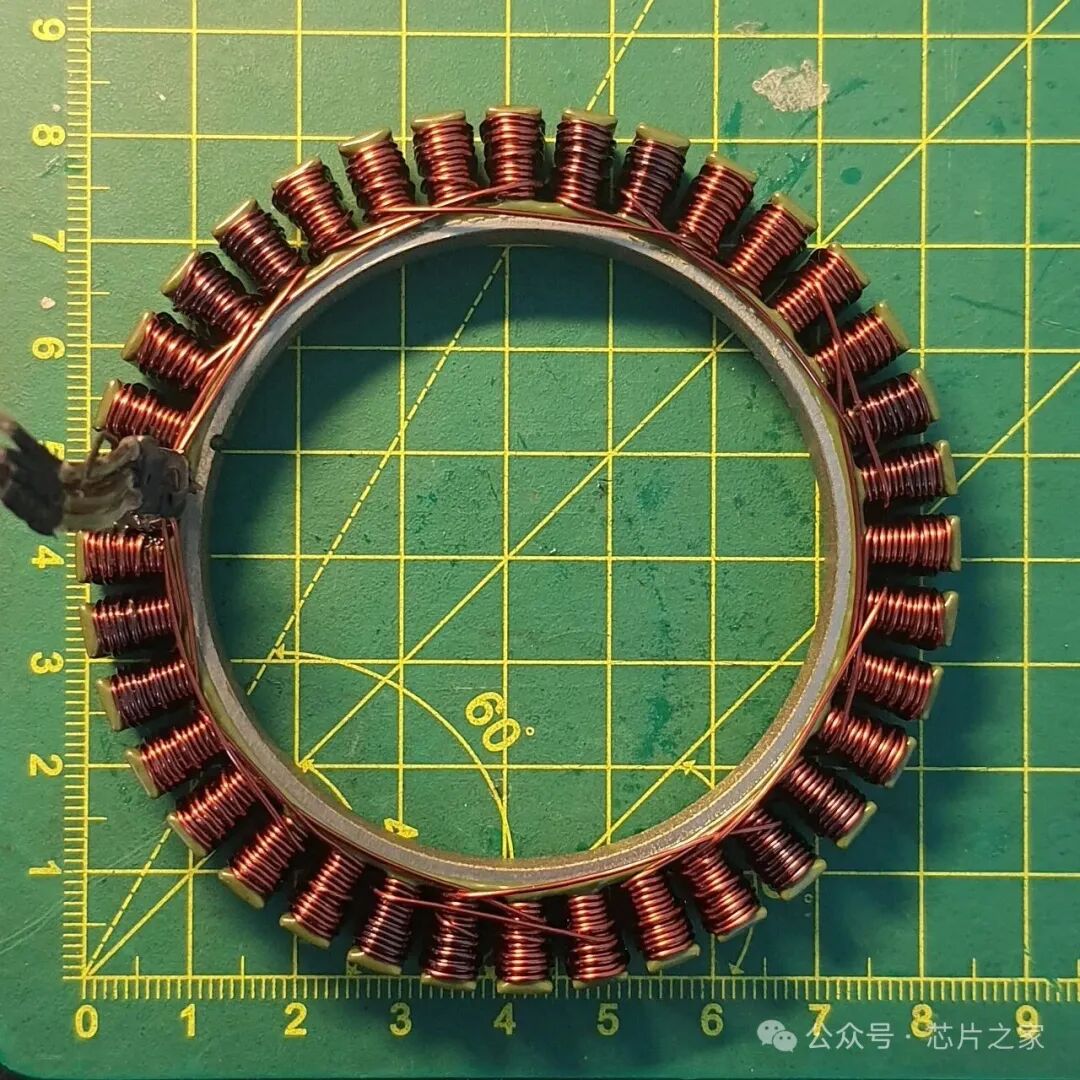
电机定子采用36槽设计,每个槽内绕有16圈直径为0.8mm的漆包线。有趣的是,定子本身并没有任何机械锁定机构,它仅依靠与顶板之间的摩擦力来固定。

最后是外壳体和环形齿轮。



这次深入的拆解让我们看到了顶尖开源实战机器人项目在关节执行器设计上的精妙之处,从基于 STM32F103C8T6 的紧凑型 C/C++ 驱动方案到高度集成的机械传动,都体现了极高的工程水平。希望这份详尽的拆解报告,能为你带来启发。如果你对机器人或嵌入式开发感兴趣,欢迎来云栈社区交流更多技术细节。 |  发表于 2026-3-6 03:52:52
|
查看: 391|
回复: 0
发表于 2026-3-6 03:52:52
|
查看: 391|
回复: 0
