在工业4.0的时代背景下,如何将前沿的AI视觉技术快速、可靠地部署到实际生产线中,是许多工程师和开发者面临的共同挑战。今天要介绍的是一个专为此场景而生的框架——OpenIVS(Open Source Industrial Vision System)。它不仅仅是一个算法库,更是一套完整的、软硬结合的开源解决方案,旨在帮助开发者从零开始快速搭建出稳定、高效的工业级视觉检测系统。
核心优势:为何选择 OpenIVS?
1. 全栈式工业框架
与单纯提供算法的仓库不同,OpenIVS 提供了工业现场落地所需的完整闭环能力,形成了端到端的解决方案:
- 📷 相机控制:深度集成海康机器人(Hikrobot)的 MVS SDK,支持灵活的图像采集与硬件触发控制。
- 🤖 AI推理:无缝对接“深度视觉AI平台”,支持高性能深度学习模型的加载与批量推理。
- ⚙️ PLC通讯:内置成熟的 Modbus 协议栈,可直接与三菱、西门子等主流PLC进行信号交互,实现OK/NG判定、位置控制等关键指令。
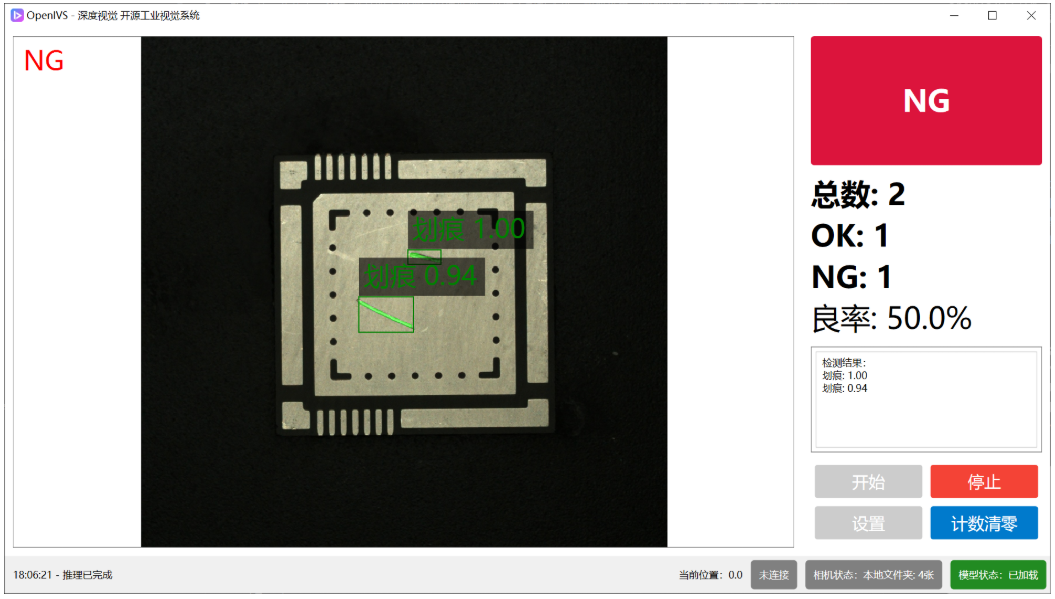
- 💻 可视化界面:基于WPF开发的用户友好型操作界面,参数配置、实时监控与日志查看一目了然。

2. .NET生态友好
对于大量使用 C#/.NET 技术的传统工业自动化团队而言,这是一个显著优势。OpenIVS 允许开发者直接利用现有的技术栈进行开发,无需为了引入视觉能力而去学习Python等新语言,极大地降低了学习成本和上手门槛。
3. 高度可定制化
源码完全开放,意味着你可以从底层的相机初始化逻辑到上层的业务流程编排,根据产线的具体需求进行灵活修改与深度定制。例如:
- 支持多相机并行管理与同步采集。
- 支持复杂的模型级联推理流程(如先进行目标检测定位,再进行实例分割分析)。
- 支持自定义的图像预处理与后处理决策逻辑。
技术架构与核心功能模块剖析
🔌 硬件连接层
OpenIVS 默认通过海康机器人MVS SDK进行工业相机的驱动与控制。
- 安装要求:需安装
MVS_STD_4.4.0 或更高版本。
- 灵活扩展:在代码中通过
CameraInitializer.cs 等类管理相机实例,可以轻松地将系统从单相机模式扩展为复杂的多相机同步采集系统。
- 注:若需使用其他品牌相机,理论上只需替换对应的SDK/DLL引用并适配初始化逻辑即可。

🧠 AI推理引擎
系统集成了一个高性能的推理SDK(需配合深度视觉AI平台使用),负责模型的加载与计算。
- 模型管理:通过
ModelManager.cs 可以动态加载和管理多个模型文件。
- 级联推理:框架支持设计复杂的业务流。一个典型的例子是,先用一个检测模型定位出产品的缺陷疑似区域(ROI),然后将这些区域裁剪出来,送入另一个更精细的分割模型进行详细分析。
// 级联推理示例代码
public string PerformCascadeInference(Bitmap image) {
// 第一阶段:通用缺陷检测,定位ROI
var detectionResult = _models[“DetModel”].InferBatch(imageList);
// 第二阶段:针对感兴趣区域(ROI)进行精细分割
var smallImages = CropImage(image, detectionResult);
var segmentationResult = _models[“SegModel”].InferBatch(smallImages);
return segmentationResult;
}
📡 设备控制与业务逻辑
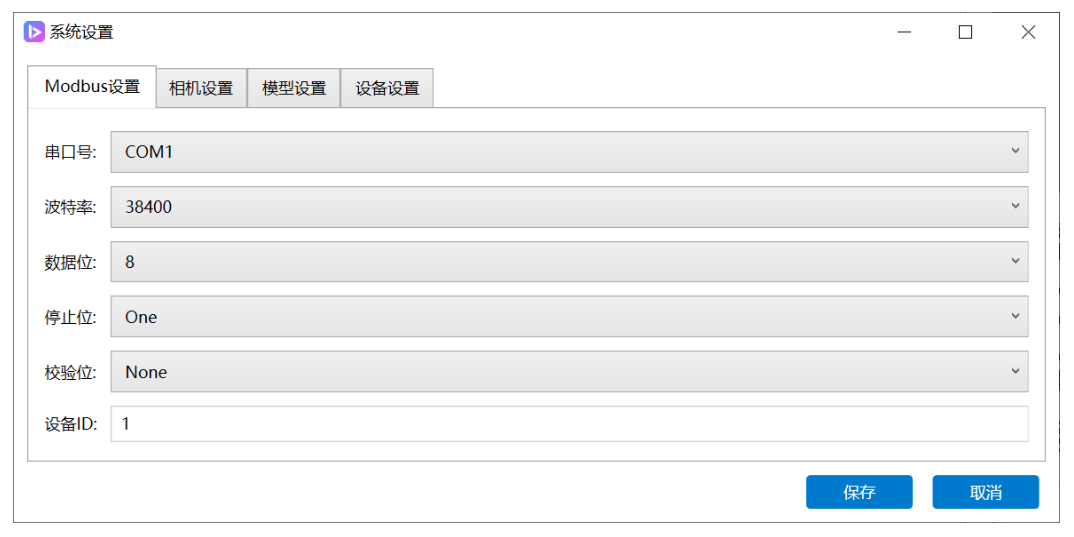
工业现场离不开与PLC(可编程逻辑控制器)的稳定通讯。OpenIVS 通过 ModbusManager.cs 实现了标准的串口或网络Modbus通讯。
- 参数配置:波特率、数据位、设备ID等通讯参数可在软件界面中直接调整。
- 信号交互:可自定义寄存器写入逻辑。例如,当视觉系统判定一个产品为NG(不良品)时,自动向PLC的特定寄存器写入一个信号,触发流水线上的剔除机构动作。
- 流程编排:在
MainLoopManager.cs 中,可以定义“移动到位->触发拍照->AI推理->结果判断”的主循环逻辑,轻松适配不同生产节拍的生产线。
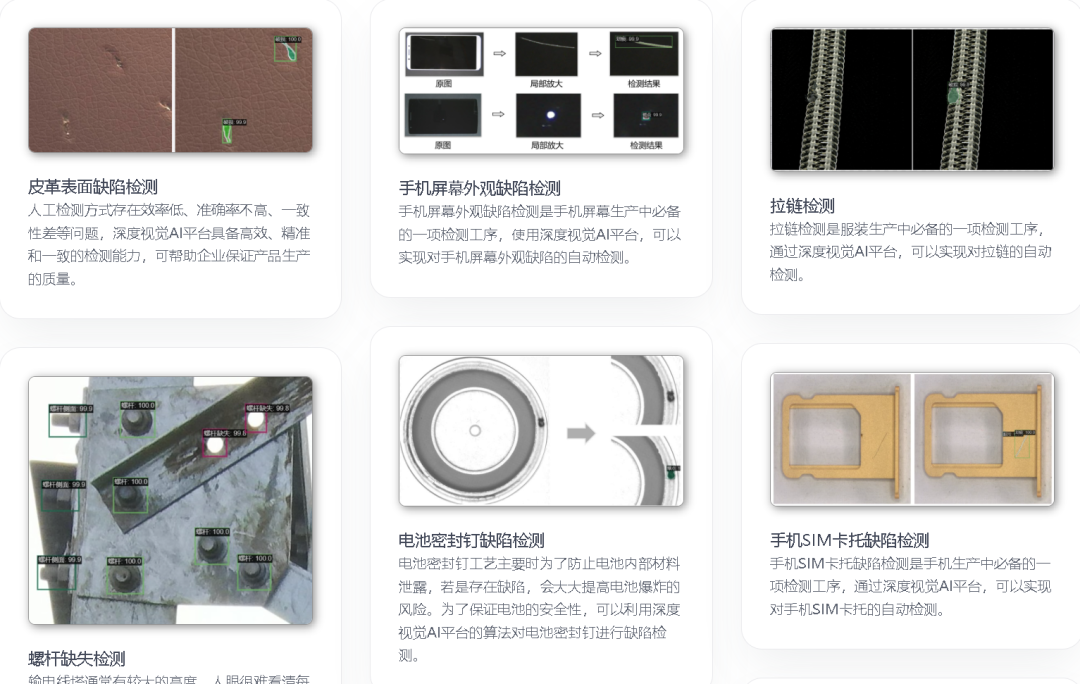
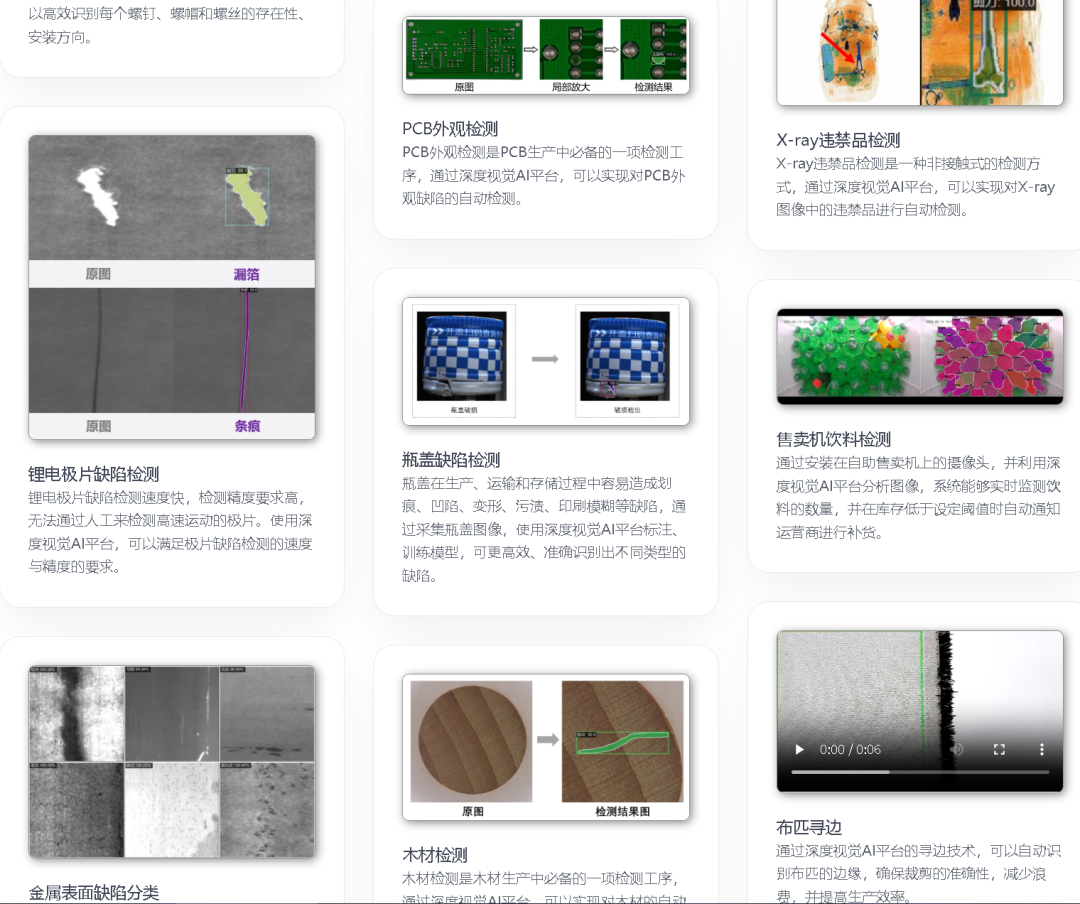
🏭 典型应用场景
OpenIVS 框架的灵活性使其能够适应多种工业视觉检测需求,以下是一些典型场景:
| 场景 |
应用价值与实现方式 |
| 电子元件质检 |
利用多相机系统同步采集PCB板正反面图像,检测焊点缺陷、元件漏装或错装。 |
| 汽车零部件尺寸测量 |
结合PLC控制机械臂移动,对零部件的多个关键尺寸进行高精度、自动化的非接触测量与复核。 |
| 包装行业字符识别 |
实时采集流水线上包装的图像,通过集成的OCR模型识别生产日期、批号等信息,错误时立即报警。 |
| 新能源电池外观检测 |
采用级联模型策略:先用检测模型定位电池极耳、密封钉等关键部位,再针对这些部位进行划痕、污损等细微缺陷的检测。 |
📦 快速开始指南
想要亲身体验 OpenIVS 的强大功能?你可以按照以下步骤快速搭建环境:
1. 环境准备
- 安装 .NET Desktop Runtime (对应版本)。
- 安装 海康机器人MVS SDK (必选)。
- (可选) 安装 Halcon,用于集成传统的机器视觉算法处理。
- 注册并安装 深度视觉AI平台SDK,这是运行深度学习模型推理所必需的。
2. 获取源码
通过Git克隆项目仓库到本地:
git clone https://github.com/dl-cv/OpenIVS.git
3. 配置与运行
- 使用Visual Studio等工具打开项目解决方案。
- 检查
App.config 配置文件或在软件设置界面中,根据你的硬件修改相机型号、IP地址以及PLC通讯参数。
- 导入你已经训练好的、并转换为平台格式的模型文件。
- 点击运行,连接硬件后,即可在界面上看到实时的图像采集、检测画面与统计结果。
总结与资源
OpenIVS 有效地填补了开源社区在 Windows/.NET 平台下工业视觉整机软件领域的空白。它并非简单的算法堆砌,而是一个真正考虑了工厂落地需求、具备工程化思维的框架。无论你是希望快速验证方案可行性的工程师,还是旨在构建标准化、可复制产品的开发者,OpenIVS 都是一个值得深入研究甚至参与贡献的优秀开源实战项目。
对于从事人工智能和工业自动化,特别是使用C#/.Net技术栈的开发者而言,了解和掌握这样的框架,无疑能为解决实际的工业视觉问题提供一条清晰的路径。
提示:工业现场环境复杂多变,建议在正式部署前,充分进行稳定性测试,包括相机长时间运行的可靠性、与PLC通讯的延迟及抗干扰能力,并根据实际的光照条件仔细调整图像预处理参数。
相关资源链接
|  发表于 2026-3-14 04:43:14
|
查看: 342|
回复: 0
发表于 2026-3-14 04:43:14
|
查看: 342|
回复: 0
