在嵌入式开发领域,调试信息的输出就像程序员的“眼睛”。传统方法高度依赖串口打印(printf),但你是否常被其各种限制所困扰?
传统串口调试存在几个明显的痛点:
- 速度瓶颈:输出数据卡顿,占用CPU时间,且难以在中断等实时性要求高的场景中使用。
- 硬件资源占用:需要额外占用MCU宝贵的UART外设接口。
- 物理连接繁琐:离不开USB转串口工具和一堆杜邦线,接线、找端口费时费力。
- 异常即断联:一旦程序跑飞或崩溃,串口通信往往随之中断,导致关键的故障现场信息丢失。
- 通道冲突:MCU的串口数量有限,调试与功能应用常常“打架”。
那么,有没有一种方法能打破这些枷锁,让调试既高速又便捷呢?答案是将RTT(Real Time Transfer)技术与MicroLink调试器结合使用。
什么是RTT?
RTT,全称Real Time Transfer(实时传输),是Segger公司推出的一种调试技术。它的核心优势在于无需中断MCU的正常执行,就能实现MCU与调试主机(PC)之间的双向数据交换。
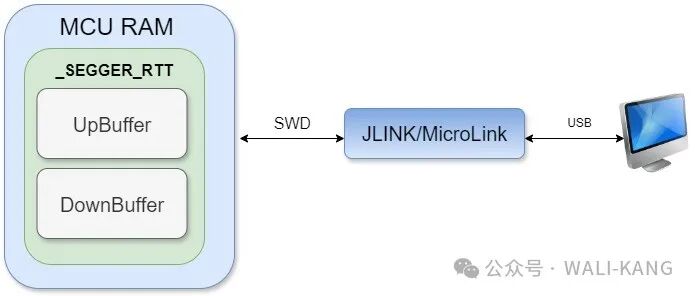
你可以把它想象成在MCU的RAM里开辟了一块“共享白板”(缓冲区)。MCU程序随时可以把调试信息写上去,PC端的调试工具则随时可以来读取;反过来,PC也能向这块白板写入指令,MCU再从中读取。整个过程基于内存的直接读写,速度极快(微秒级),对MCU运行的干扰极小。
其基本工作原理围绕一个名为 _SEGGER_RTT 的控制块展开,该结构体位于MCU的RAM中。它管理着多个上行缓冲区(UpBuffer,用于MCU到PC的数据发送)和下行缓冲区(DownBuffer,用于PC到MCU的数据接收),记录了每个缓冲区的地址、大小及读写指针。
- MCU发送数据:调用
SEGGER_RTT_Write 或 SEGGER_RTT_printf 等API,将数据拷贝到指定的UpBuffer。
- PC接收数据:调试器(如J-Link或MicroLink)通过SWD接口访问MCU的RAM,读取UpBuffer中的内容。
- PC发送数据:调试工具将数据写入DownBuffer。
- MCU读取数据:MCU程序定期从DownBuffer中读取指令或数据。
如何使用RTT?
在工程中集成RTT非常简单,只需三步:
第一步:集成源码
从Segger J-Link安装目录下的 Samples/RTT 文件夹中,将必要的源码文件复制到你的工程中。通常需要以下文件:
SEGGER_RTT.cSEGGER_RTT.hSEGGER_RTT_Conf.hSEGGER_RTT_printf.c (如果需要printf格式化功能)
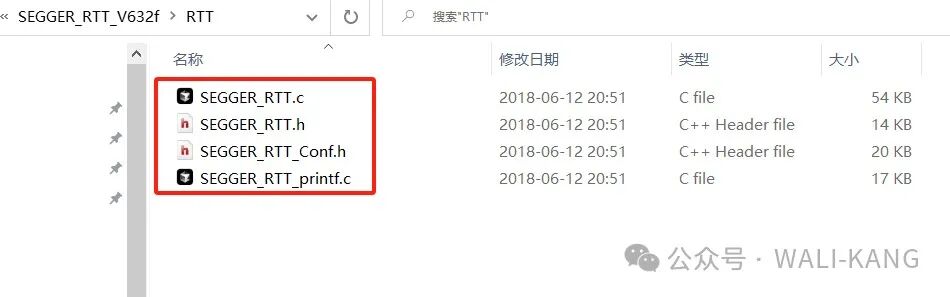
将这些文件加入编译,并包含头文件路径。
第二步:在代码中调用RTT API
替换或补充你原有的printf语句。
#include "SEGGER_RTT.h"
int main(void)
{
SEGGER_RTT_Init();
SEGGER_RTT_printf(0, "System Booted. Hello RTT!\n");
while(1){
// 你的应用代码
SEGGER_RTT_printf(0, "Tick: %d\n", some_counter);
}
}
第三步:连接调试工具查看输出
传统方式是使用Segger提供的专用软件,如J-Link RTT Viewer或RTT Logger。但这带来了新的限制:软件功能单一、界面简陋,且无法与你熟悉的第三方串口助手(如SSCOM、SecureCRT、MobaXterm等)集成,不利于自动化测试脚本的编写。
MicroLink:释放RTT的全部潜力
这正是 MicroLink 的价值所在。它是一款创新的调试工具,能够将RTT通道映射为标准USB CDC虚拟串口。这意味着,RTT高速数据传输的优势得以保留,而数据呈现的终端却变得无比自由——任何能打开串口的软件都能成为你的RTT调试终端。
工作流程如下:
- MCU端:代码无需任何改变,依然使用RTT库发送日志。
- MicroLink端:通过USB连接到PC,在设备管理器中会出现一个虚拟串口(如COMxx)。MicroLink内部固件会通过SWD接口自动扫描并访问MCU内存中的
_SEGGER_RTT 控制块。
- PC端:打开你最喜欢的串口助手(如Putty、Xshell、甚至Python的
pyserial),连接MicroLink生成的虚拟串口,即可实时收发RTT数据。这让 调试 流程变得异常灵活。

带来的直接好处:
- 工具自由:不再被绑定在特定软件上。
- 无速率限制:通信速率取决于SWD和内存访问速度,远高于传统串口波特率。
- 免物理接线:无需额外的串口硬件和连接线。
- 即插即用:享受RTT的高性能,却使用串口助手的熟悉操作。
RTT vs. 传统串口性能对比
| 特性 |
传统串口 |
RTT (配合MicroLink) |
| 通信速率 |
低 (受波特率限制,通常几十到几百Kbps) |
高 (基于内存访问,可达MB/s级别) |
| CPU占用 |
较高 (中断服务程序开销) |
极低 (本质是内存拷贝,几乎无打扰) |
| 崩溃后可用性 |
❌ 通常随程序崩溃而中断 |
✅ 只要RAM未损坏,仍可能读取最后信息 |
| 多通道支持 |
❌ 一个物理串口对应一个通道 |
✅ 支持多个独立的Up/Down Buffer通道 |
| 使用灵活性 |
有限,需硬件支持 |
极高,可轻松集成到各种日志系统或命令行界面 |
快速上手MicroLink的RTT功能
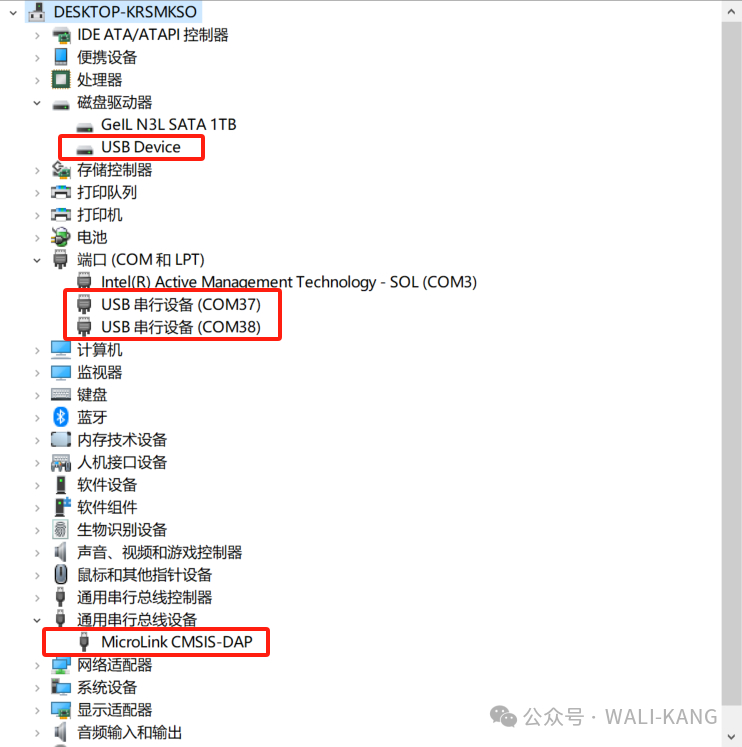
第一步:连接与识别端口
用USB线将MicroLink连接至电脑。在设备管理器的“端口(COM和LPT)”下,你会看到两个新增的串行设备:
- 一个真实的USB转串口:用于传统的UART通信,发送数据时MicroLink的LED会闪烁。
- 一个USB CDC虚拟串口:专用于RTT通信,打开此串口发送回车,通常会收到
>>>提示符,且数据传输时LED不会闪烁,以此可作区分。
第二步:通过串口助手启动RTT
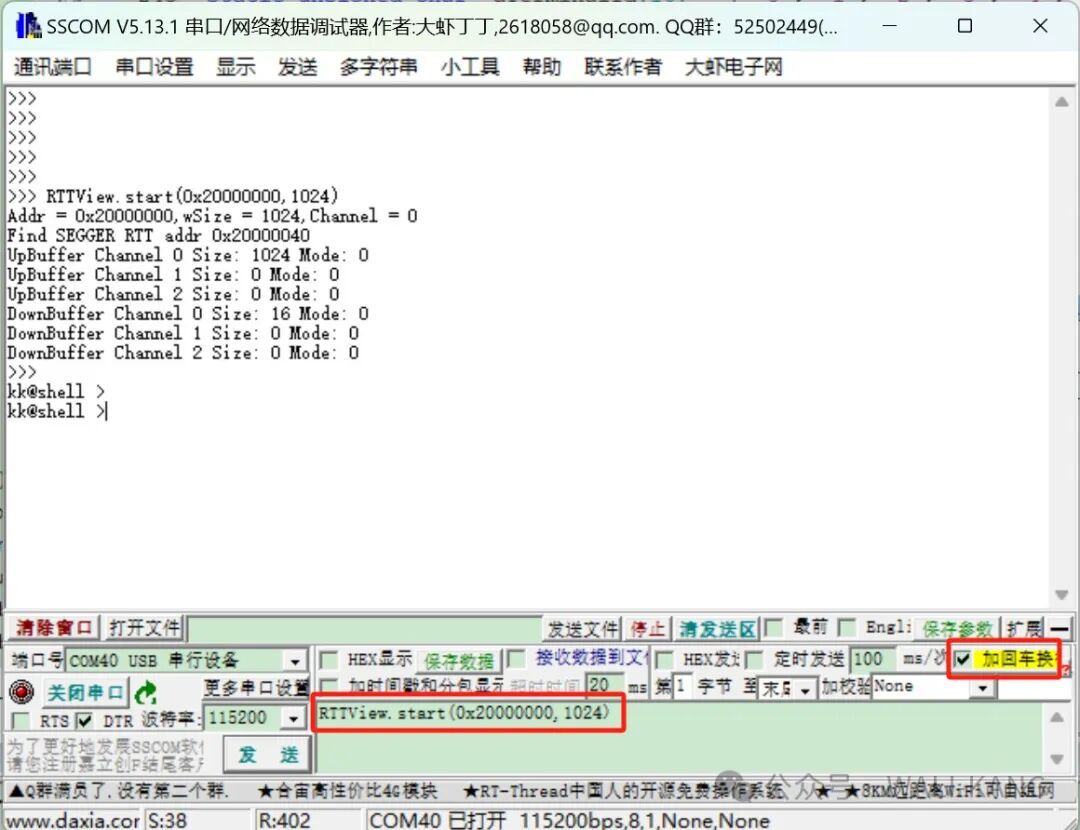
- 打开串口助手(以SSCOM为例),连接MicroLink的虚拟串口(例如COM40)。
- 在发送区输入以下命令并发送(确保勾选“加回车换行”):
RTTView.start(0x20000000, 1024, 0)
0x20000000:指定开始搜索 _SEGGER_RTT 控制块的内存起始地址。1024:搜索范围的大小(字节)。0:指定使用的RTT通道号。
- 如果命令成功,助手会显示找到的RTT控制块信息及各缓冲区配置。之后,MCU通过
SEGGER_RTT_printf输出的内容就会实时显示在接收区。
如何确定搜索地址(0x20000000)?
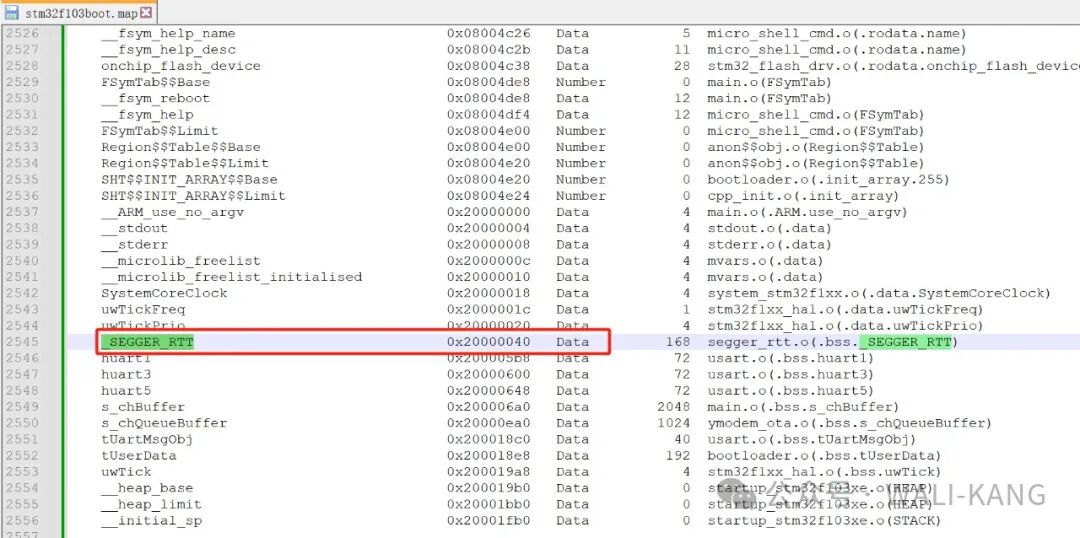
这个地址是MCU RAM的起始地址,MicroLink会从此处开始扫描。更精确的做法是查看IDE(如Keil MDK)生成的链接映射文件(.map)。在map文件中搜索“SEGGER_RTT”,即可找到其确切的RAM地址。
例如,在map文件中发现如下行:
SEGGER_RTT 0x20000040 Data 168 segger_rtt.o(.bss.SEGGER_RTT)
这表明 _SEGGER_RTT 控制块位于 0x20000040。那么你可以使用更精确的命令:RTTView.start(0x20000040, 1024, 0),以加快查找速度。
总结
RTT + MicroLink 的组合,为嵌入式调试带来了一次解放。
它继承了RTT技术高速、低侵入性的核心优点,又通过MicroLink的虚拟串口功能,打破了专用调试软件的壁垒,实现了工具链的自由选择。你不再需要忍受慢速的波特率、繁琐的接线,也不再担心程序崩溃后丢失调试线索。对于追求高效、敏捷开发的嵌入式工程师,尤其是基于 C语言 和 STM32 等平台的开发者而言,这无疑是一个提升调试体验和生产力的优秀方案。如果你想了解更多底层原理或交流其他开发技巧,欢迎到 云栈社区 与大家一同探讨。
 发表于 2026-3-15 19:12:49
|
查看: 282|
回复: 0
发表于 2026-3-15 19:12:49
|
查看: 282|
回复: 0
