在产品开发的全生命周期中,你是否厌倦了在不同阶段切换不同工具的繁琐?从研发调试到量产烧录,再到售后升级,工具链的割裂不仅增加了成本,更消耗了宝贵的精力。本文将实测一款旨在解决这一痛点的产品——MicroKeen调试器,探讨它如何通过集成化设计,将调试、下载、量产与IAP升级功能融合进单一硬件。
先看一个真实的产品生命周期
第一阶段:研发 —— Debug 才是核心战场
很多人以为下载速度是重点。
错。
下载速度只是最基本的需求。
真正需要解决的是:
printf 打印日志- 实时数据可视化
- RTOS的任务时序分析
于是你会用到:
- J-Link 下载调试
- USB 转串口看日志
- J-Scope数据可视化
- SEGGER SystemView 分析任务时序
第二阶段:小批量 / 量产 —— 又换一套工具
终于调通。
进入试产。
问题来了:
你总不能让产线工人用调试器烧录吧?
于是又要买:
研发阶段的工具,不能直接用于生产。
这本来是一个“同类功能”。
却被割裂成两套体系。
第三阶段:售后 —— 真正的拦路虎
产品发出去以后。
Bug 会出现。
甲方会提新需求。
必须升级固件。
这时候你要做什么?
- 写 IAP Bootloader
- 再开发 PC 升级上位机
- 再维护一套通信协议
于是——
又一套工具体系诞生了。
问题的本质
研发一套工具。
量产一套工具。
售后一套工具。
同一个产品,三套工具。
一、我们真的需要这么多工具吗
1、正版调试器确实强,但不是谁都负担的起
说到调试器,绕不开 SEGGER 的 J-Link。
性能强,生态成熟。
但现实是:
- 项目一多,成本直线上升
- 团队多人开发,每人一台?
- 产线要不要配?
- 售后要不要备?
工具成本,很快就从“合理”,变成“压力”。
2、真正的问题:工具链是割裂的
典型开发流程:
| 阶段 |
工具 |
| 调试下载 |
J-Link |
| 串口日志 |
USB 转串口 |
| 量产烧录 |
脱机下载器 |
| 售后升级 |
自研bootloader+升级上位机 |
每个阶段都在换工具。
每换一次:
真正消耗的不是钱。
是精力。
二、MicroKeen 的解决方案
于是有了 MicroKeen(MKLink)。它旨在用一套硬件,覆盖整个产品生命周期。
1、功能覆盖
| 功能/型号 |
MKLink V2 |
MKLink V3 |
MKLink V4 |
| 高速在线下载调试 |
✔ |
✔ |
✔ |
| 高速USB转串口(12M) |
✔ |
✔ |
✔ |
| USB转RTTVIEW |
✔ |
✔ |
✔ |
| USB转SystemView |
✔ |
✔ |
✔ |
| USB转VOFA+ |
✔ |
✔ |
✔ |
| 支持python脚本 |
✔ |
✔ |
✔ |
| 支持winusb,win10以上系统免驱 |
✔ |
✔ |
✔ |
| 自动扫描芯片,提示连接成功 |
|
✔ |
✔ |
| vref电压自适应,1.8~5V电压 |
|
✔ |
✔ |
| 拖拽下载(bin文件) |
✔ |
|
|
| 脱机下载(bin/hex文件,解析FLM算法) |
✔ |
✔ |
✔ |
| 内置512kB 内部flash |
✔ |
|
|
| 内置4MB nor flash |
|
✔ |
|
| 内置128MB SD卡 |
|
|
✔ |
| USB转485 |
|
|
✔ |
| 功率计:电压电流实时显示 |
|
|
✔ |
| 内置ymodem等协议串口升级固件 |
|
|
✔ |
2、MicroKeen(MKLink) vs J-Link
| 能力维度 |
MicroKeen(MKLink) |
J-Link |
差异化说明 |
| 在线下载与调试 |
CMSIS-DAP V2 |
专有协议 |
各有千秋 |
| USB 转串口 |
内置高速 USB-UART最高 12M Baud |
需外接或特定型号支持 |
MKLink 原生集成,减少工具依赖 |
| RTT / RTTView |
原生支持 RTT,任意串口助手上位机可用 |
需 RTTViewer 专用上位机 |
MKLink 更开放,不绑定上位机 |
| SystemView |
原生 SystemView 协议,RTT 方式采集,无需额外硬件 |
依赖 J-Link 硬件 |
功能等效,硬件与成本更友好 |
| 数据可视化(VOFA+ / J-Scope) |
原生 VOFA+ 协议,基于 SWD 非侵入采集 |
J-Scope 专有协议 |
VOFA+数据可视化效果更佳 |
| 自动化与脚本能力 |
内置 Python 脚本引擎,可定制量产 / 升级流程 |
J-Link Commander,命令式控制 |
MKLink 更适合复杂自动化场景 |
| 量产与脱机下载 |
支持脱机烧录,FLM + Python 脚本 |
需额外量产工具 |
MKLink 覆盖生产阶段 |
| IAP升级能力 |
内置ymodem协议栈 |
无 |
原生支持ymodem协议升级固件 |
三、MicroKeen的底层逻辑:它不止是一个下载器
它被定位为一个开发平台。
1、性能基础:不是随便选的 MCU
采用 先楫半导体 HPM 高性能 MCU:
- 360 MHz 主频
- 内置 USB High-Speed PHY
这不仅仅是为了“堆配置”,更是为了能够并行、稳定地运行多种调试与数据转发任务。
2、软件架构:构建平台而非堆砌功能
- RT-Thread RTOS:提供稳定的多任务调度与资源管理,支撑调试、下载、数据转发并行运行;
- CherryUSB 协议栈:基于 USB HS,实现 CDC / MSC 等多类设备高速并行工作;
- PikaPython 脚本引擎:在设备侧运行 Python 解释器,支持脱机下载与升级流程的脚本化与二次开发;
- Arm-2D 图形加速库:UI加速引擎,实现流畅、低资源占用的本地人机交互界面。
3、关键创新点:一根 USB 线,全搞定
一个 USB 口,同时虚拟出多种设备,支持:
- CMSIS-DAP 调试
- USB 转串口(最高 12M Baud)
- RTT 转发
- SystemView 协议
- VOFA+ 协议
- 脱机下载存储器
- IAP升级通道
- WinUSB 免驱
你不再需要额外准备:
- RTTViewer
- J-Scope
- 额外串口工具
- 专门开发的升级上位机
真正实现 Debug 全家桶,一体化。
四、功能实测:它到底能干什么?
1、下载速度实测
与 J-LINK V12 进行速度对比。目标芯片为 STM32H743,开发环境 MDK V5.39,将 2558KB 的 HEX 文件下载到内部 FLASH。使用逻辑分析仪测试全过程时间。
MicroLink测试结果:

测试结果对比:
| 调试器 |
总耗时(擦除,编程,校验) |
| MicroLink |
24.205秒 |
| J-LINK V12 |
33.439秒 |
测试显示,在此次对比中 MicroLink 的下载速度快于 J-Link V12。
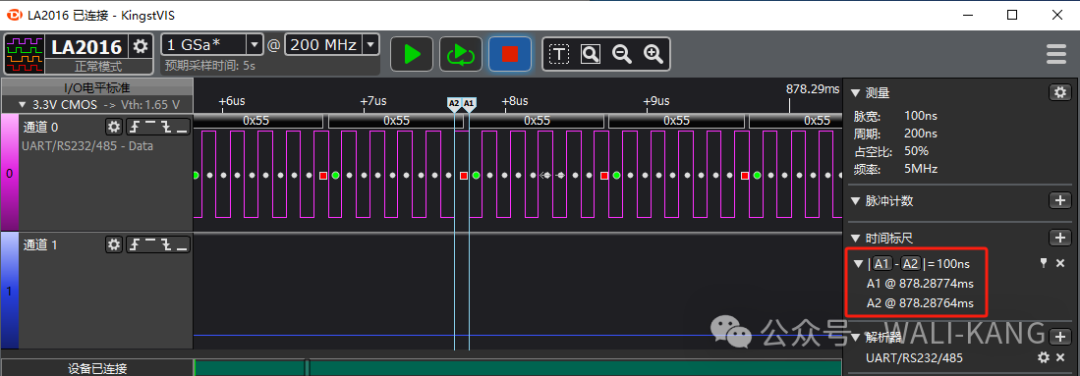
2、高速USB转串口
MicroLink内置USB转串口功能,支持常见串口和485通信,串口最高支持12M波特率。逻辑分析仪抓取10M波特率下的波形,每个bit传输时间为100ns,验证了其高速稳定性。
3、RTT:不再绑定专用上位机
MicroKeen 原生支持 SEGGER RTT(Real Time Transfer)。其原理是:MCU程序将数据写入RTT缓冲区,MKLink通过SWD物理访问读取RTT控制块和缓冲区,并将其映射为一个普通的USB CDC虚拟串口。

这意味着你可以使用任意串口助手(如SSCOM)来接收RTT数据,无需安装专用的RTTViewer。连接虚拟串口后,输入指令即可启动:
RTTView.start(0x20000000,1024,0)
0x20000000:搜索RTT控制块的起始地址;1024:搜寻范围大小;0:启动RTT的通道。
4、VOFA+ 可视化,不占 MCU 串口
MKLink 原生适配 VOFA+ 上位机协议,可替代 J-Scope。它通过 SWD 直接读取目标芯片内存中的变量,封装为 VOFA+ 协议后通过虚拟串口发送,实现非侵入式的实时数据可视化。
核心优势:
- 无需占用 MCU 串口资源。
- 基于 SWD 的非侵入式采集。
- 支持多种数据类型,高速刷新。
使用示例:在VOFA+中连接虚拟串口,发送命令开始读取。
vofa.send(0x20000030, "uint8_t", 0x2000154c, "float", 0x20001550, "float", 0.00001)
5、原汁原味的SystemView
MKLink 原生支持 SEGGER SystemView 协议,无需额外Trace硬件。其原理是通过RTT通道采集目标系统(如RT-Thread)的事件数据,转发给PC上的SystemView上位机进行可视化分析。

核心优势:
- 无需额外 Trace 硬件,成本更低。
- 基于 RTT 的低侵入式采集。
- 兼容官方 SystemView 工具,实现任务级、时间轴级的运行态分析。
6、脱机下载:直接脚本化
MKLink支持脱机离线下载,并借助PikaPython脚本引擎让下载流程可编程、可定制。设备虚拟U盘中的 offline_download.py 脚本示例展示了如何加载FLM算法并烧录多个文件:
import PikaStdLib
import time
import cmd
import load
# SWD 时钟频率(Hz)
SWD_CLOCK_HZ = 10000000
# 设置下载速度
cmd.set_swd_clock(SWD_CLOCK_HZ)
abort = False
# 加载下载算法
if load.flm("FLM/STM32F10x_1024.FLM", 0x08000000, 0x20000000) != 0:
print("load flm failed")
abort = True
break
# 下载bin文件
if load.bin("bootloader.bin",0x08000000) != 0:
print("load bin failed")
abort = True
break
# 下载hex文件
if load.hex("rt-thread.hex") != 0:
print("load hex failed")
abort = True
break
if not abort:
cmd.set_beep_on()
time.sleep_ms(100)
cmd.set_beep_off()
else:
print("auto download aborted")
注意: 请根据实际项目需求修改下载算法文件名称及待下载文件的名称与地址。
7、售后升级:内置Ymodem协议
MKLink内置Ymodem协议,可搭配支持Ymodem接收的Bootloader(如开源框架MicroBoot)进行可靠的固件升级。通过Python脚本,几行代码即可将MKLink变为升级工具:
import PikaStdLib
import cmd
import ym
ymodem = ym.ymodem("uart",115200)
#ymodem = ym.ymodem("485",115200)
ymodem.send("rt-thread.hex")
无需额外开发 PC 端升级软件,简化了售后维护流程。
五、开源向实:不止是一个工具,也是一个开发平台
基于 MKLink 硬件平台,其本身也是一个优秀开源项目的工程化实践范例,涵盖:
- RT-Thread 在国产高性能MCU上的应用
- CherryUSB 实现USB HS多类设备复合
- PikaPython 嵌入式脚本引擎的落地
- Arm-2D 高性能图形库的集成
开发者不仅可以“使用” MKLink,更可以将其作为开发板,深入学习这些开源项目在真实产品中的协同工作方式。我们始终相信,开源不止于代码,价值在于落地。
六、核心价值:统一工具链
MicroLink 的核心价值,不在于“它比谁快”,而在于它把工具链统一了。
- 研发用它调试;
- 测试用它抓取数据;
- 产线用它脱机烧录;
- 售后用它远程升级。
如果你也受够了在开发、生产、维护各阶段频繁切换工具带来的学习、适配与管理成本,那么一个旨在统一工具链的解决方案,或许值得你深入了解。通过集成强大的脚本能力和对主流调试协议的原生支持,它试图回答一个问题:为什么一个产品的完整生命周期,不能由一套连贯的工具来支撑?
欢迎在 云栈社区 与更多开发者交流嵌入式开发工具链的最佳实践。
 发表于 2026-3-15 19:23:48
|
查看: 306|
回复: 0
发表于 2026-3-15 19:23:48
|
查看: 306|
回复: 0
