赛题基本信息
- 赛题名称:Leonardo - Airborne Object Recognition Challenge
- 赛题类型:计算机视觉、物体检测
- 赛题任务:从飞行视频录像中识别关注的物体
竞赛官网:https://www.kaggle.com/competitions/leonardo-airborne-object-recognition-challenge/
赛题背景
在执法或搜救等飞行任务中,通过飞机的光电传感器实时、准确地识别目标是保障任务成功的关键。尽管现代目标检测模型在理想、可控的实验室环境中表现出色,但当它们面对真实、复杂的空中成像场景时,挑战便接踵而至:
- 不稳定的视频流:受飞机自身运动、剧烈的震动、快速的缩放(Zoom)以及视角的急剧变化影响,图像序列极不稳定。
- 复杂的环境条件:目标可能非常微小、距离遥远、被部分遮挡、图像模糊,或者仅在特定光谱(如红外)下才清晰可见。
- 严苛的实时性要求:算法最终需要部署在资源有限的机载系统上,必须在模型精度和推理效率之间找到最佳平衡点。
赛题目标
本次竞赛的目标是开发一个鲁棒的目标检测模型。这个模型需要能够适应高度多变、充满不确定性的空中场景,在追求高精度的同时,还必须做到快速和轻量化,以满足真实机载环境的运行需求。
- 数据集:包含从真实飞行视频录像中提取的航拍图像,涵盖了可见光(RGB) 和红外光(Infrared) 两种光谱。
- 任务类型:目标检测(Object Detection)。
- 代码限制:
- 必须通过 Kaggle Notebook 提交。
- CPU/GPU 运行时间均不得超过 9 小时。
- 禁用互联网访问,但允许使用公开的外部数据和预训练模型。
- 奖金设置:总奖金 50,000 美元(包括排名前五的排名奖和专门的效率奖)。
数据集
数据集包含约 40,000 张 图像,源自直升机摄像头的实时视频流,涵盖了从城市、海洋、乡村到山区等多种作业环境。其核心价值在于高度模拟了真实航拍任务中的各种不确定性:
- 多光谱采集:同时包含 RGB(可见光) 和 红外(Infrared) 两种影像,为模型提供了更丰富的特征信息。
- 多变环境:覆盖了多种光照条件、天气状况和能见度,考验模型的泛化能力。
- 高难度特征:图像中包含了真实的传感器噪声、极具挑战性的拍摄视角、剧烈的目标尺度变化以及物体被部分遮挡或模糊的情况。
数据集共标注了 7 类 需要识别的目标对象:
- Aircraft(飞机):任何固定翼飞机(客机、轻型飞机、喷气式飞机等)。
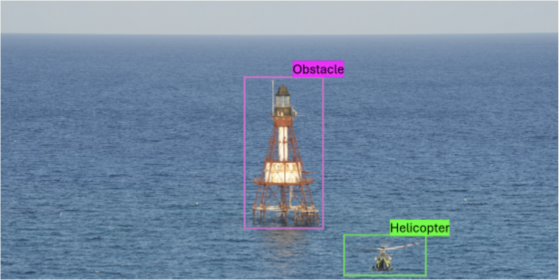
- Helicopter(直升机):任何旋翼飞机(商业、超轻型或倾转旋翼型)。
- Drone(无人机):任何旋翼无人机。
- Ground Vehicle(地面车辆):陆基机动车辆(汽车、卡车、拖拉机等)。
- Ship(船只):水上船只(货轮、小船、渔船、客轮等)。
- Human(人):任何背景或姿势下的人。
- Obstacle(障碍物):高大或潜在危险的物体(起重机、窄塔、天线、电线杆、风机叶片等)。
竞赛提供的数据组织形式如下:
| 文件/文件夹名称 |
描述 |
| train/ |
包含约 17,700 张 PNG 格式训练图像。 |
| train.csv |
训练集标注文件,包含:ImageId、class、bbox(相对坐标:x_min y_min x_max y_max,范围 0.0-1.0)。 |
| test/ |
测试集图像。提交后,系统会将样例替换为约 20,000 张 隐藏测试图像。 |
| sample_submission.csv |
提交格式示例。 |
时间轴
- 2026年3月19日:比赛开始。
- 2026年6月16日:报名截止日期及组队截止日期。
- 2026年6月23日:最终提交截止日期。
- 注:所有截止时间均为当日 UTC 23:59。
评价指标
比赛设立了双重维度的评估体系,不仅看精度,也看效率:
- 核心指标(mAP):使用 PASCAL VOC 2010 mean Average Precision (mAP) @ IoU > 0.5。
- 提交格式:
ImageId, PredictionString(包含标签、置信度及归一化后的坐标 x_min y_min x_max y_max)。
- 效率指标(Efficiency Prize):为了鼓励开发者设计轻量化模型,特设效率奖。评分公式综合考虑了模型的预测精度(mAP)与在Kaggle环境中的运行时间(Runtime),旨在寻找精度与速度的帕累托最优解。
对于想要深入数据科学竞赛,尤其是计算机视觉和目标检测领域的朋友来说,这类结合了实际应用背景和技术挑战的赛题是绝佳的练手机会。你可以在 云栈社区 找到更多相关的开源实战项目分享和技术讨论,与同行一起交流模型优化的技巧与心得。 |  发表于 2026-3-27 04:58:53
|
查看: 252|
回复: 0
发表于 2026-3-27 04:58:53
|
查看: 252|
回复: 0
