机器人演示视频或图片我们看得多了,但当几台搭载了不同智能模型的机器人真机被放在同一个赛场上,进行限时任务比拼时,那种紧张刺激的现场感还是让人忍不住瞪大眼睛。

这场精彩的具身智能真机对决,就发生在前两天于深圳举办的全球首届具身智能开发者大会(EAIDC 2026)——暨「具亮计划」黑客松·大湾区巅峰赛的现场。来自清华、北大等全国顶尖高校的20强队伍,围绕模型适配与真机部署同台竞技,上演了一场硬核的技术较量。
你以为挑战仅限于此?远不止!作为主办方,自变量机器人为参赛队伍提供了强力辅助,包括高泛化的基础模型支持,以及从数据采集、模型训练、真机部署到现场评测的全流程教程。这不仅帮助开发者快速上手、高效调试,更能让大家将精力聚焦于核心算法优化与真实场景落地的关键问题上。同时,赛事还提供了WALL-OSS、Pi0.5、Dream Zero等多款全球主流模型供选手灵活选择与适配,协同完成任务挑战。

真机实操、线下限时对战,这本身就是检验一个具身智能模型易用性与泛化能力最直接、最真实的压力测试。当开源模型被放到真实赛场反复验证,被开发者直接调用并跑通完整任务闭环时,其生态价值早已超越了开放代码本身,正在实现从开放到可用,再到共创的跨越。
一场具身模型的真实场景大考
黑客松活动并不新鲜,但聚焦于具身智能领域的黑客松,那可就有很大不同了。这场由自变量机器人发起、让全国优秀开发者线下“硬刚”的「具亮计划」黑客松,赛事宗旨既简单又热血:为所有怀揣机器人梦想的开发者提供一个真枪实弹的舞台。赛事依托具身智能开源模型,搭建起一套可复现、可验证的开发者挑战体系,专为敢想敢做、敢于落地的技术人量身打造。

在为期两天的决赛现场,集结了从早前远程线上初赛中脱颖而出的佼佼者,其中包括来自清华、北大等顶尖高校的20强队伍,选手实力堪称“硬核”。但常言道,机器人在演示视频里能轻松炫技是一回事,到了真实多变的环境中能否稳定跑通任务又是另一回事。
因此,决赛阶段的规则直接升级,挑战性拉满。赛制采用了从难到易的阶梯式多任务体系,数据采集、推理决策到物理执行的全流程都需要参赛者在真实环境中完成。在为期四天的比赛时间内,各队伍需在统一的硬件、资源和真实任务条件下,现场完成从模型适配、训练、部署到最终展示的完整闭环。
值得一提的是,比赛对选手使用的模型没有限制性要求。作为主办方,自变量机器人已为选手们做好了充分的后勤保障:提供基础数据集和基线模型,现场配备了高性能机械臂、相关数据采集设备以及充足的算力资源。参赛者无需自备硬件和基础素材,入场即可全身心投入代码与算法的优化中。

可以说,这场比赛对参赛选手是一场综合能力大考,对参赛的具身模型而言,同样是一场严峻考验。当前,行业面临的一个普遍瓶颈是:许多模型参数看似漂亮,但一到实际部署环节就容易“掉链子”,适配周期长、调试成本高,真正跑通并不容易。而决赛现场这种限时+真机的紧张环境,本身就构成了一道最直接的检验关卡。
一方面,模型能否快速、顺畅地接入现场硬件设备并跑通全流程,直接反映了其易用性与工程化适配水平,而这正是具身智能实现产业化落地的必要前提。另一方面,面对真实的硬件设备和定制化任务,模型能否保持性能稳定,不受环境干扰、不出现执行偏差,则是对其跨场景泛化能力的直接检验。这种产业级的技术实测,为行业筛选优质技术、厘清落地方向提供了极具价值的实战依据。
真机对线:开源模型被拉上赛场见真章
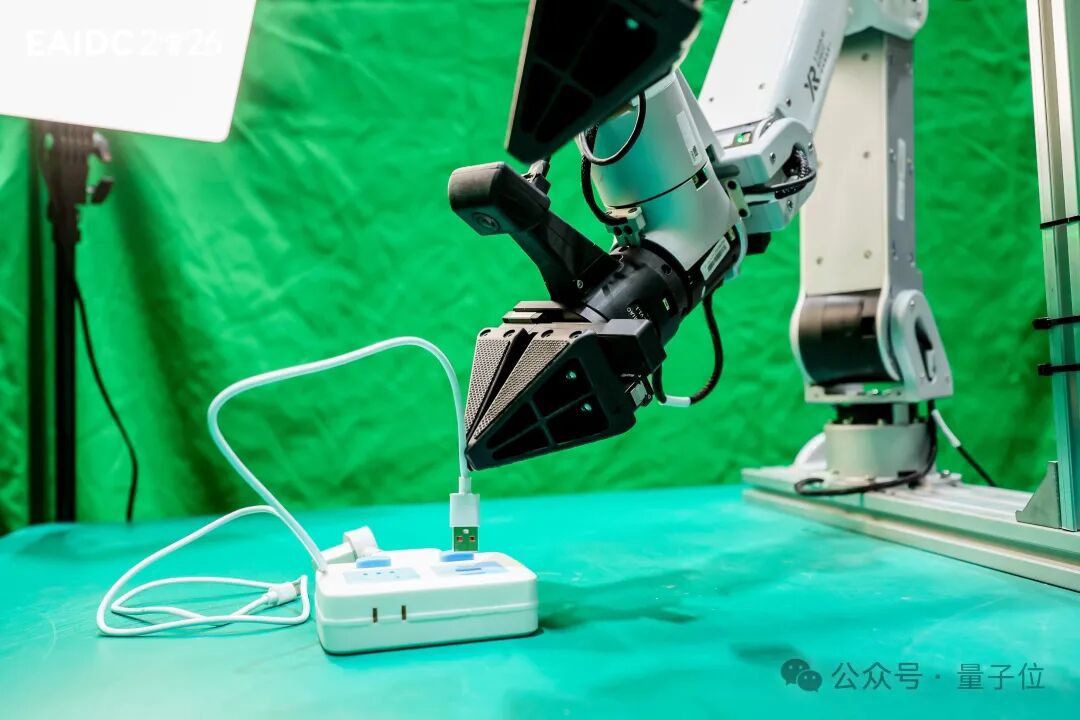
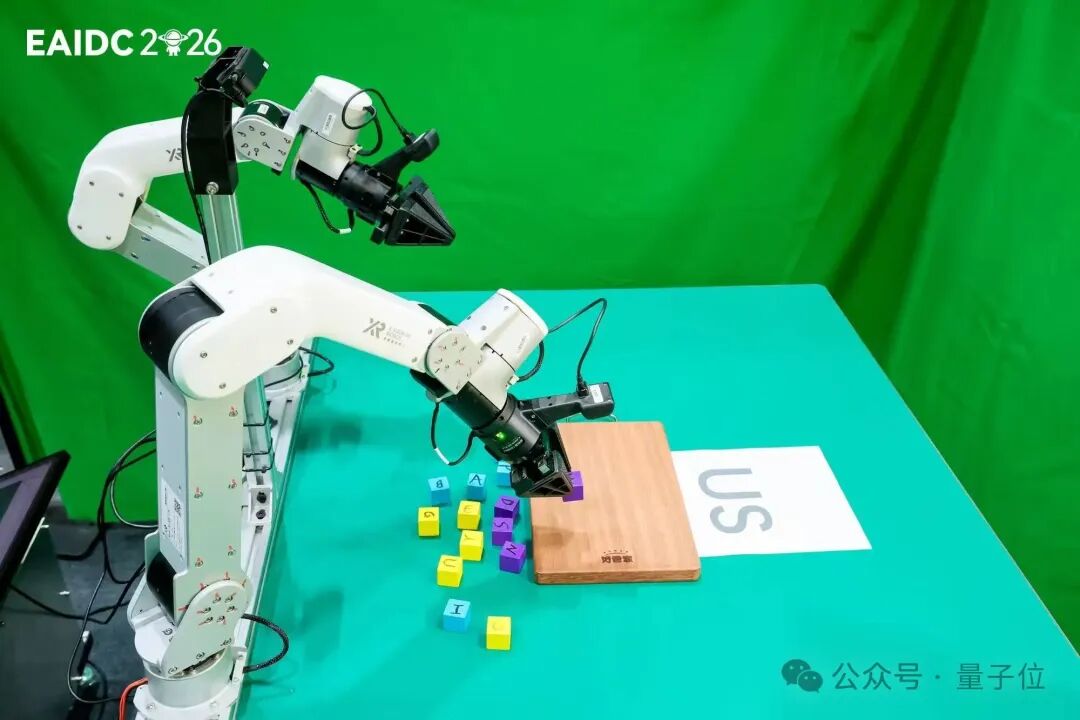
光说不练假把式,决赛现场选手间的真机PK环节可谓全程高能。在比赛任务设置上,共有套环立柱、按指令分拣水果、插接电源线、拼写单词四项挑战等待参赛队伍攻克。
这些任务听上去简单有趣,实则极其考验模型的综合硬实力:
- 套环立柱,考验最基础也最关键的物理执行能力,选手需要通过模型控制机械臂,精准完成环状物体的抓取、移动与落位。

- 水果分拣,则是对模型语言理解与物体识别能力的直接校验,选手需通过自然语言指令,让机械臂识别草莓、柠檬、樱桃等不同水果,并按要求放入指定容器。

- 插接电源线,更偏向精细操作与视觉感知的考察,USB接口狭小、对位容错率极低,机械臂需在复杂视角下完成精准对准与插入。
- 拼单词任务,侧重长时序逻辑与连贯动作规划,在给定目标单词后,机械臂需从散乱的字母块中按顺序识别、抓取、摆放,一步步拼出完整词汇。
考察维度如此全面,选择哪一款模型参赛,自然成了决定队伍现场发挥的关键。赛制允许选手自由选择并适配开源模型;同时,主办方自变量机器人也为几种主流模型提供了配套教程与重点支持,包括被视为领域代表性机器人基础模型之一的Pi0.5、英伟达的世界动作模型Dream Zero、自变量机器人的开源模型WALL-OSS等。

这些经过预训练和验证的成熟开源模型,能大幅降低参赛队伍的底层研发成本,让大家能直接基于高性能基座进行快速算法迭代。此外,主办方提供的从数据采集、模型训练、真机部署到现场评测的全流程教程,进一步降低了上手门槛,帮助开发者将有限时间真正用于核心算法优化与场景落地。
事实上,一款真正具备行业价值的开源具身模型,其价值不应只停留在论文数据或基准测试排名上。更关键的是,它能否贴近真实产业需求,让开发者拿来就能用,并以较低成本完成部署调试,顺畅跑通从训练、微调、适配到任务落地的完整闭环。能落地、可复现、易用性好,才是下一代具身智能模型的核心竞争力。
中国如何推动具身智能开源生态
当前,中国具身智能产业正从实验室原型阶段,全面迈入工程化、场景化落地的关键期。尽管已有成熟产品实现商用,但行业发展仍面临一个现实问题:行业内开源模型的部署、硬件适配与场景工程化的综合技术门槛依旧较高,对开发者的全栈能力要求严苛。换言之,开源壁垒高、生态协同不足等核心瓶颈正日益凸显。
在EAIDC 2026收官日的圆桌论坛上,来自产业界与学术界的多位专家,就具身智能开源生态话题展开了深度讨论。嘉宾们形成了一个普遍共识:具身智能已走过纸上谈兵阶段,行业迫切需要一个能在真实物理环境中检验技术成熟度的公共平台。
在“具身智能变革之路,从技术奇点到产业跃迁”主题圆桌上:
- 地平线机器人实验室负责人苏治中指出,机器人领域技术门槛极高,若无开源支撑,行业尤其是教育领域的发展会大幅放缓。
- 自变量机器人合伙人兼算法负责人甘如饴表示,开源模型层出不穷,亟需建立客观的优劣评判标准,未来评测体系也应开源,核心是聚焦模型在真实场景中的落地效果。
- 阿里巴巴达摩院具身平台产品负责人田明认为,开源即共识,共识即价值。在技术范式尚未收敛的早期,开源能快速凝聚生态合力。
- 美团高级总监、无人机硬件研发负责人吴昊天提出,要实现商用落地,必须依托开源生态协同,破解数据采集成本高、信息标准化难等共性难题。

在另一场“具身智能产学研协同创新的体系构建与实践探索”圆桌中,嘉宾们同样强调了协同的重要性:
- 清华大学计算机系副研究员苏航认为,高校擅创新,产业界强工程,双方优势互补才能推动落地。
- 中山大学智能工程学院教授梁小丹指出,当前国内开源模型同质化严重,需学界与产业界深度联动,补齐资源短板,实现自主创新。
- 自变量机器人联合创始人兼CTO王昊表示,许多数据因隐私无法完全开放,仅靠线上文档难成闭环,应通过线下实战与产学研结合提升效率。
- 中国智能化技术研究院院长李鹏主张开源应面向真实工业需求,能开放则充分开放,让技术适配场景、提升实效。
- 香港大学助理教授李弘扬表示,开源前期投入大,高校应牵头推进,企业则发挥资源优势,共建生态。

此外,在比赛收官现场,自变量机器人创始人&CEO王潜分享了其对开源生态的愿景。他表示,希望联合各方力量将中国具身智能生态推向新高度,不仅面向国内,更要聚集全球开发者,共同推动技术在各领域的普及与应用,实现真正的“具身智能平权”。

尽管各位嘉宾的研判各有侧重,但核心逻辑高度一致:具身智能产业唯有立足真问题、坚持真开源、实现真泛化,才能真正走向成熟。这也与本届EAIDC 2026“以赛促研、以研促产,推动技术从实验室走向真实场景、从算法迈向产业应用”的主题理念高度契合。
在这次黑客松决赛中,自变量机器人通过真实场景的持续验证与快速迭代,有效连接了模型、任务、开发者和应用侧,推动了开源生态的实践发展。一方面,优秀参赛者在现场形成的创新方法与经验,后续可反哺社区,推动生态进入“开源—实践—反馈—再演进”的正向循环。另一方面,线下真实赛事最能直观检验模型的易用性与泛化能力。国产开源模型在复杂任务中展现出的实力,也在一定程度上弥补了国内在机器人“智能大脑”领域的长期短板。
具身智能的特殊性在于,其能力必须通过物理世界完成最终闭环,天生带有强烈的“落地”导向。通过持续构建开源生态,为产业沉淀可复用的落地路径,能让开源价值真正从实验室落到地面。当行业评价模型的标准,从参数规模转向系统能力、工程效率和真实表现时,就需要EAIDC这样的“公共场域”来承载这种变化。
当全球开发者围绕开源模型同台竞技,模型能力在真实任务与硬件约束下被公开验证,EAIDC所承载的,已不只是一场比赛的意义,更是成为行业考察技术趋势、检验模型水准、连接开发者生态的重要载体。这也让行业的评价标准变得更清晰:真正有价值的开源模型,既要能开放,更要能落地;既要可复现,也要能在真实世界里持续跑通。
对于关心前沿技术动态的开发者而言,参与这类技术社区与赛事,是获取实战经验、跟踪行业风向的绝佳途径。我们云栈社区也持续关注并分享此类具身智能、机器人学及人工智能领域的深度内容与开源实战资源,欢迎开发者们交流探讨,共同成长。

 发表于 2026-4-1 05:03:26
|
查看: 148|
回复: 0
发表于 2026-4-1 05:03:26
|
查看: 148|
回复: 0
