
基于50万小时预训练数据,任务成功率突破99%。
当地时间4月2日,美国AI机器人公司Generalist AI发布了其最新的具身基础模型——GEN-1。这款模型在性能上实现了飞跃,将任务平均成功率提升至99%,并将机器人作业速度提高了近3倍。
这家由前谷歌DeepMind高级研究科学家Pete Florence创立的公司,团队汇聚了来自波士顿动力、OpenAI、Waymo等顶尖公司的研发人员。他们致力于“让通用机器人成为现实”,并已获得英伟达NVentures等多家知名机构的投资,估值突破3亿美元。
从推出第一代模型GEN-0到现在,仅仅过去了不到半年时间。
1小时数据即可训练机器人完成单项任务,预训练数据超50万小时
GEN-0作为该公司的首款多模态基础模型,证明了机器人领域同样遵循 scaling law,为规模化提升验证了可行性。然而,GEN-1才是其最新的里程碑式成果,在五个关键维度上实现了显著跨越:
- 速度倍增: 执行速度达到GEN-0的三倍。
- 成功率质变: 任务平均成功率由64%大幅提升至99%。
- 效率优化: 训练机器人完成单项任务仅需1小时的机器人数据。
- 应变能力强: 具备意外情况下的自我恢复与临场应变能力。
- 数据扩容: 预训练数据从27万小时扩展到50万小时高保真操作数据,覆盖全球数千个家庭、仓库、工厂等场景,并且数据运营每周新增超过1万小时。
在测试中,GEN-1能够长时间稳定工作而无需人工干预,持续完成多项复杂任务:
-
持续1小时以上的汽车配件分拣;
-
连续折叠86件T恤;
-
连续完成200余次扫地机器人维护;
-
连续完成1800余次积木装箱;
-
连续折叠纸箱超过200次;
-
连续打包手机超过100次等。
上述所有任务的成功率均突破了99%。具体来看:
- 在维护扫地机器人任务中,GEN-1成功率高达 99%,而GEN-0仅为 50%。
- 在折叠纸盒任务上,GEN-1达到 99%,GEN-0为 81%。
- 在手机装盒任务上,GEN-1达到 99%,GEN-0为 62%。
作为对比,没有经过预训练的基线模型,平均成功率只有19%。
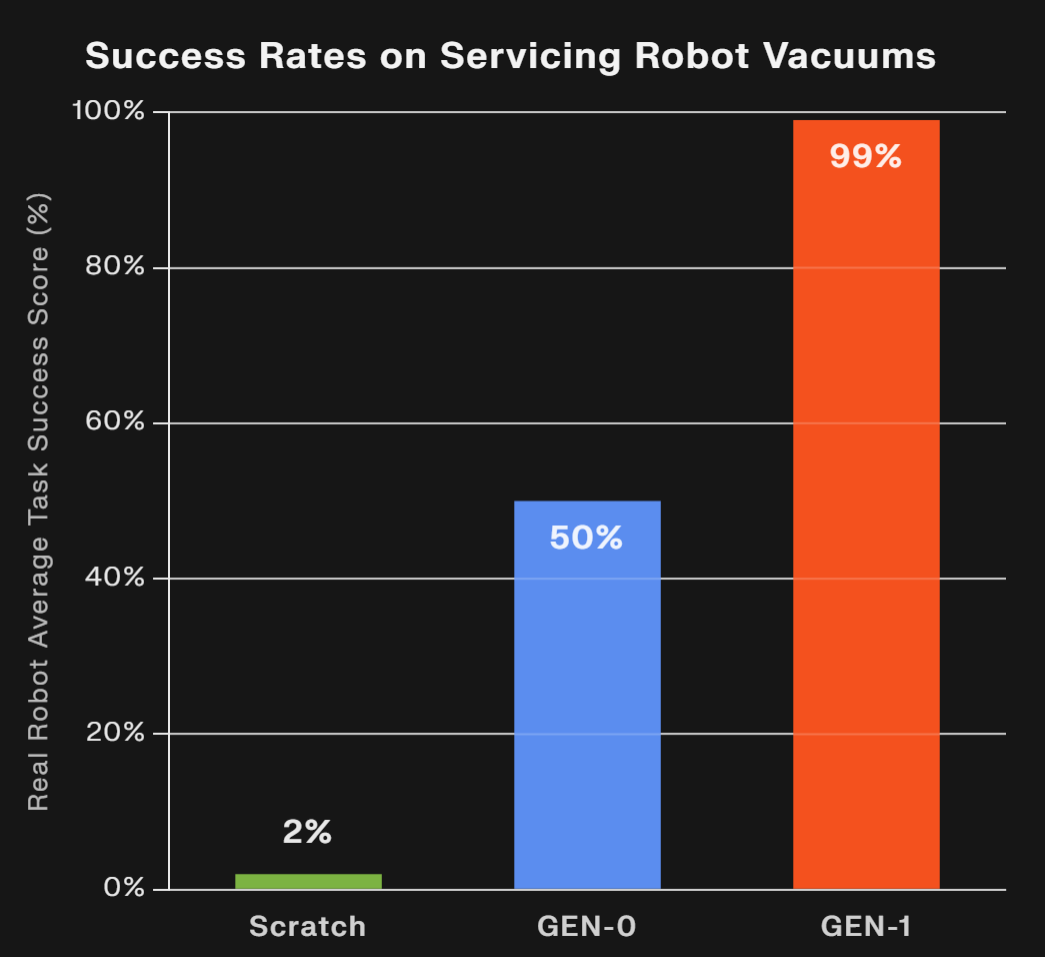
GEN-1、GEN-0和未经训练的基线在维护扫地机器人任务中的平均成功率
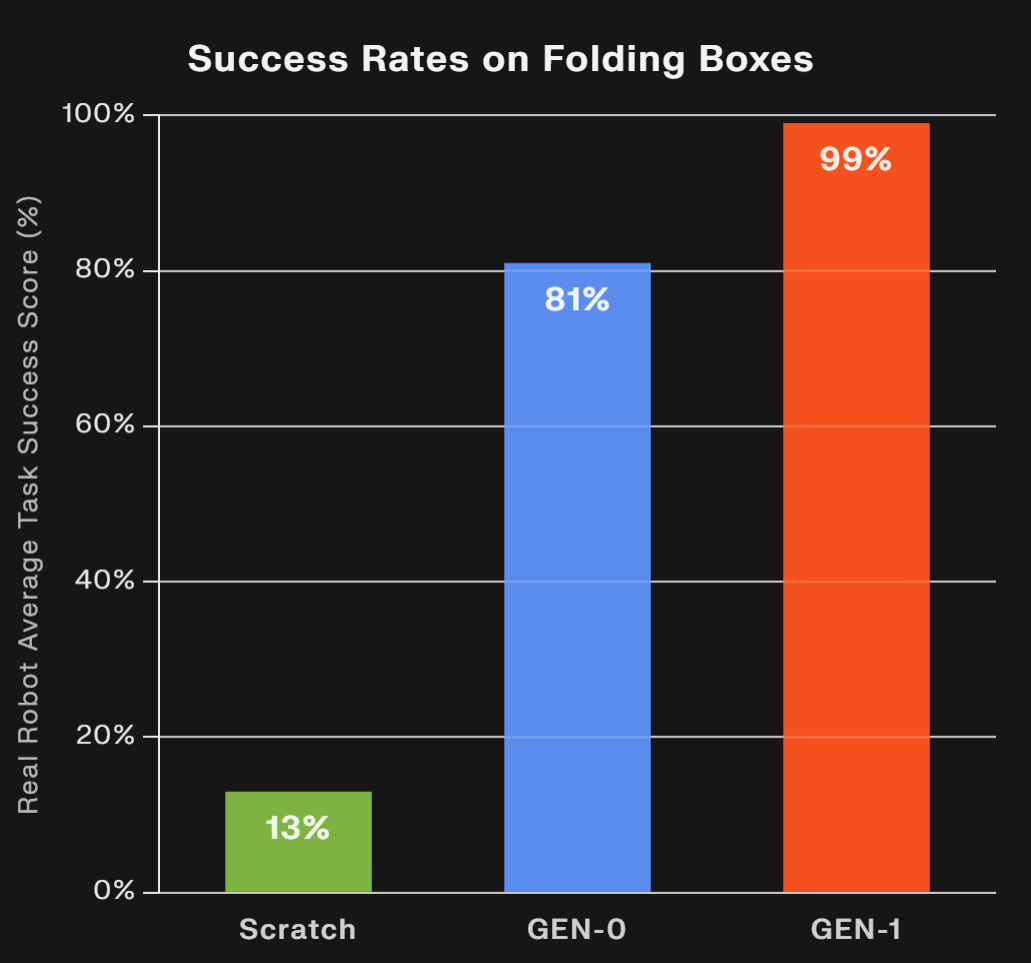
GEN-1、GEN-0和未经训练的基线在折叠纸箱任务中的平均成功率
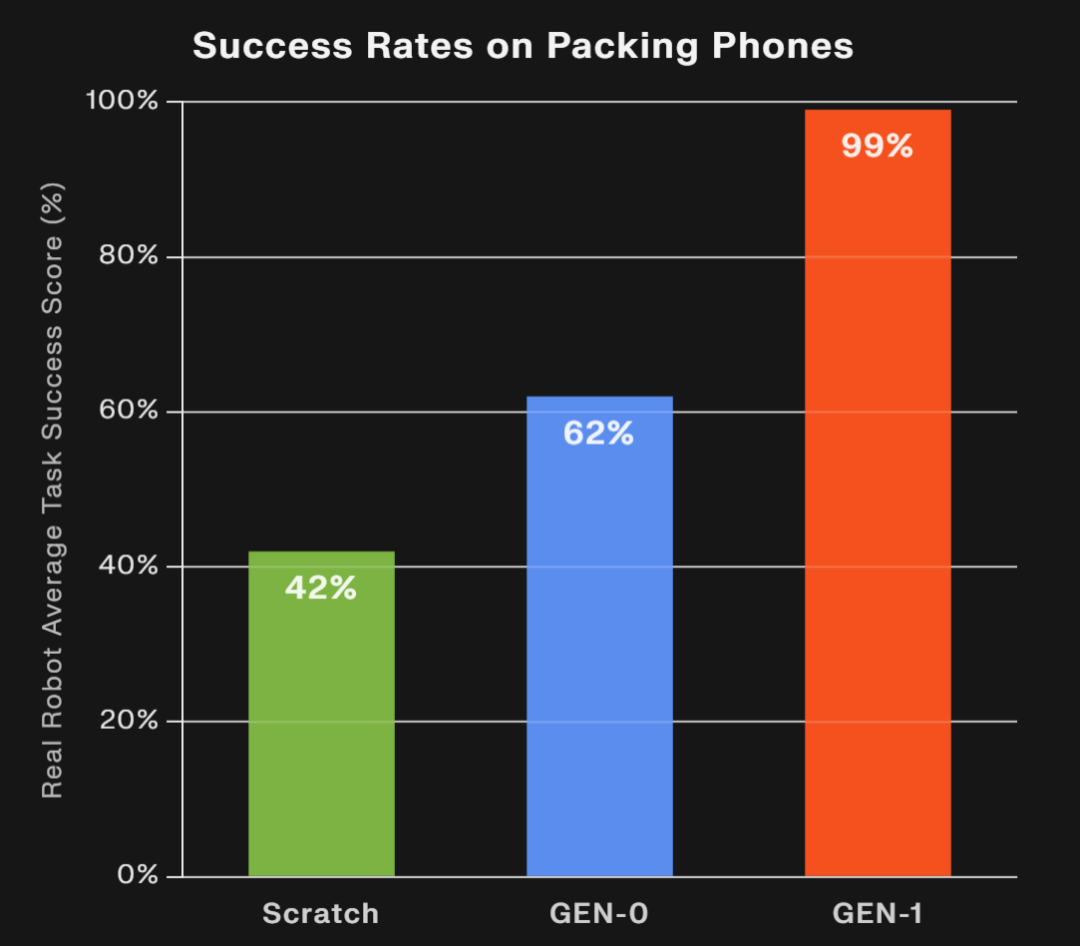
GEN-1、GEN-0和未经训练的基线在打包手机任务中的平均成功率
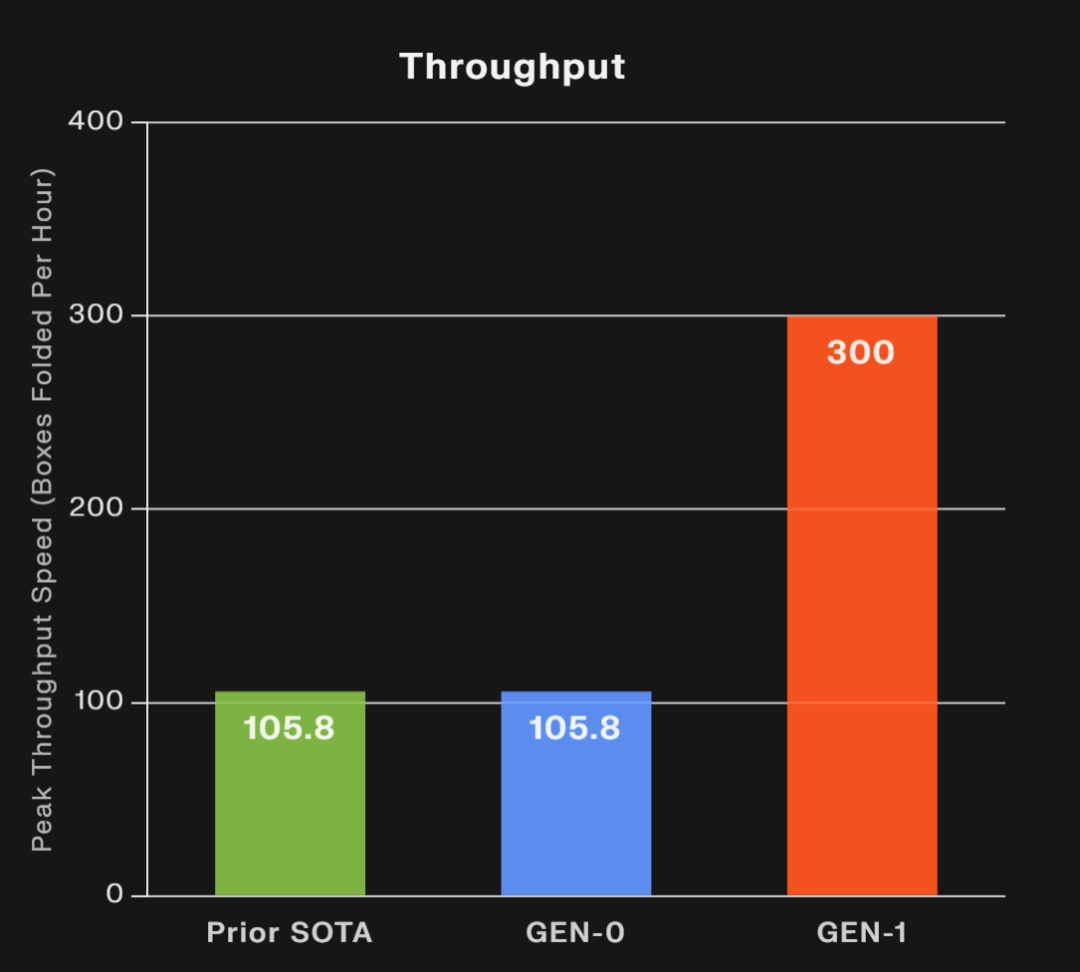
工作速度提升3倍,还能随机应变处理突发意外
在速度方面,GEN-1打破了机器人领域长期存在的“速度屏障”。
以折叠纸盒为例,GEN-0及同期其他模型耗时约34秒,而GEN-1将这一时间压缩至12秒,速度提升2.8倍。在手机装盒任务中,GEN-1仅需15.5秒,同样是GEN-0的2.8倍,任务完成速度达到行业最优水平的3倍左右。这意味着GEN-1的作业速度已超越人类演示水平,能在高速状态下精准适配物体物理特性并做出实时响应。
GEN-1实现速度突破,主要依赖于三大技术的协同:
- 经验学习(RL): 模型通过强化学习迭代,自主优化动作效率。
- Harmonic Reasoning推理架构升级: 全新的推理架构大幅提升了实时决策效率。
- 高质量预训练数据: 通过海量人类行为数据进行训练,实现知识迁移。
此外,“随机应变”能力是GEN-1的一大亮点。当工作中遇到突发意外(如分拣时零件被撞歪),GEN-1不会僵在原地,而是能自主选择多种应对方案,例如将零件放回重抓,或借助卡槽将其复位。面对更复杂的情况,它甚至能调用另一只手实现双手协同。
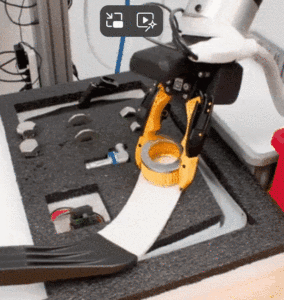
GEN-1可以自主处理突发意外

GEN-1可以协同双手完成复杂任务
这种能力让GEN-1能够灵活应对各种超出训练范围的突发状况,有效解决实际应用中的长尾问题。
结语:GEN-1并非完美无缺,研发之路任重道远
GEN-1将任务平均成功率从64%提升至99%,标志着通用智能机器人在灵巧操作领域取得了重大突破。不过需要强调的是:GEN-1并非完美无缺。
尽管在多项测试中已达到99%的成功率,但它并非在所有任务上都能保持这一水准。在部分要求严苛的工业落地场景中,模型仍需追求更高的成功率与执行效率才能实现实用化部署,这些都是当前版本需要补强的短板。
Generalist AI团队已经明确了下一代模型的研发方向,致力于解锁更广泛、更复杂的任务能力,并持续优化模型结构,进一步降低机器人单项任务的数据需求。这一进展也引发了人工智能与机器人交叉领域研究者的广泛讨论,你可以在开发者广场找到更多相关的技术见解与行业趋势分析。 |  发表于 2026-4-4 12:01:31
|
查看: 191|
回复: 0
发表于 2026-4-4 12:01:31
|
查看: 191|
回复: 0
