CW32L012哈基汪是一款基于CW32L012C8T6主控芯片设计的小型机器人/智能小车开发平台。其核心MCU CW32L012C8由武汉芯源半导体推出,是一款基于ARM Cortex-M0+内核的高性能、超低功耗32位微控制器,运行频率最高96MHz,内置64KB Flash和8KB SRAM,工作温度范围覆盖-40°C至85°C,适用于各类嵌入式应用场景。
该开发套件功能丰富,支持多种交互与控制模式:
- 语音智能操控:可通过特定口令(如前进、后退、左转、右转、加速、减速、摇尾巴等)实现人机交互。
- 蓝牙遥控:支持通过手机APP连接蓝牙进行远程控制。
- 红外遥控:可使用配套的小型红外遥控器对小车进行操控。
- 超声波自动避障:小车在运动时可自动探测前方障碍物距离并实现避障,防止碰撞。
- 形态切换:可在轮式小车与四足机器人形态之间一键切换,实现“摇尾巴”等趣味动作。
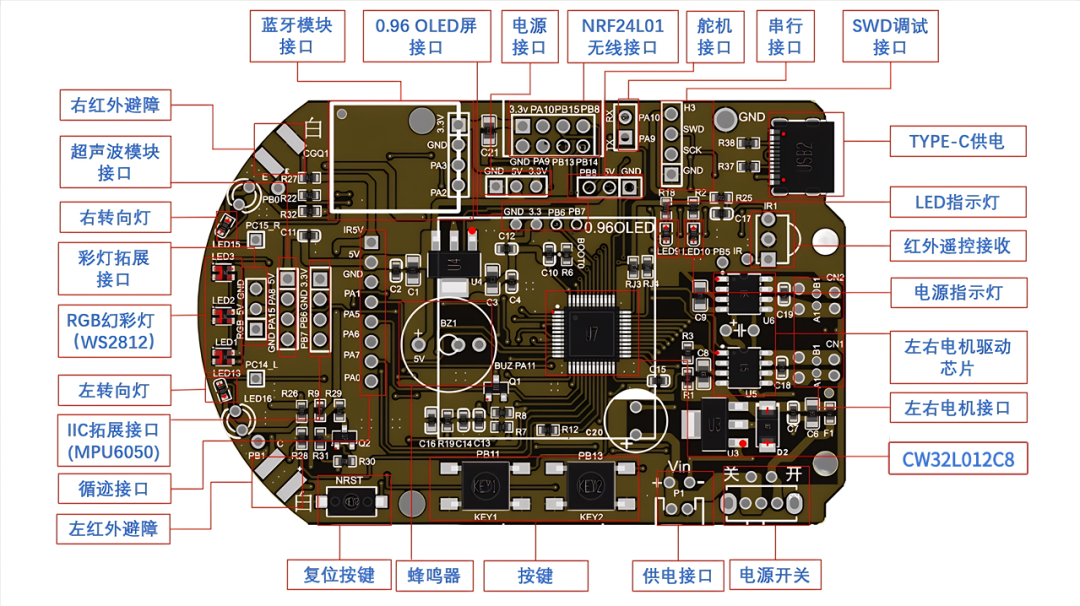
资源与硬件概览
开发套件资源参考图:
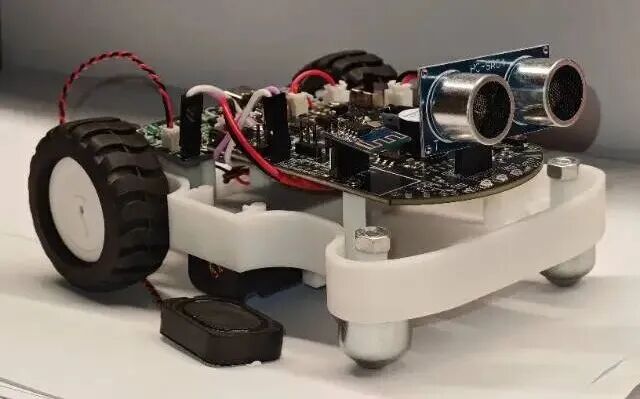
实物图:
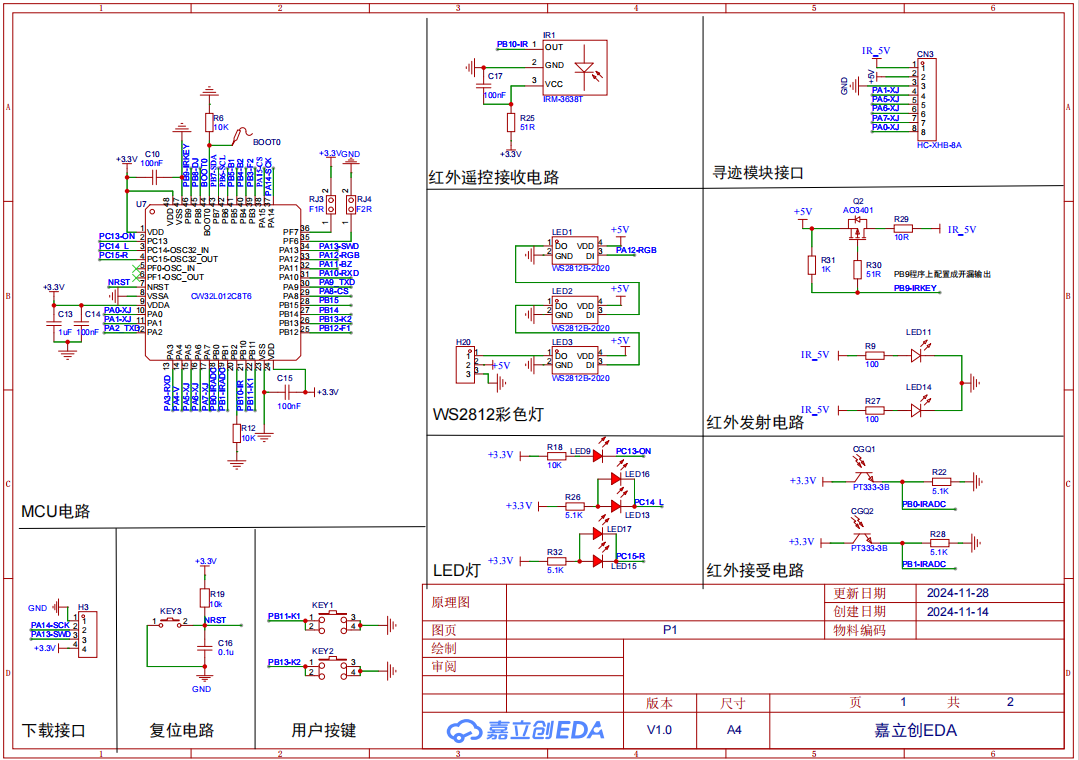
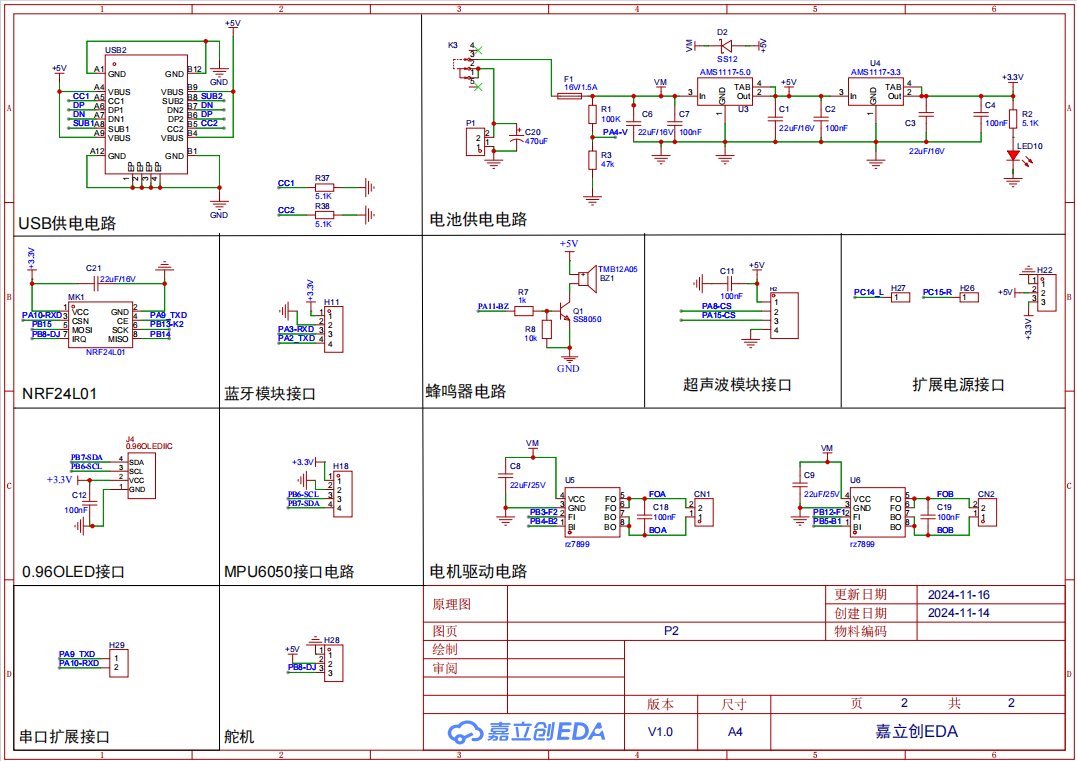
硬件原理图
资料获取
完整的开发资料(包括原理图、源码、文档等)可通过以下飞书链接获取:
https://dwi41yhz703.feishu.cn/wiki/B1Ihw31ebiX0vkkhQr2cINnkn1g

功能使用详解
1. 蓝牙遥控功能配置
使用手机“蓝牙调试器”类APP进行控制。按钮界面预设了速度档位(1-6档)与运动方向(前进、后退、左转、右转、停车)。
遥控界面:
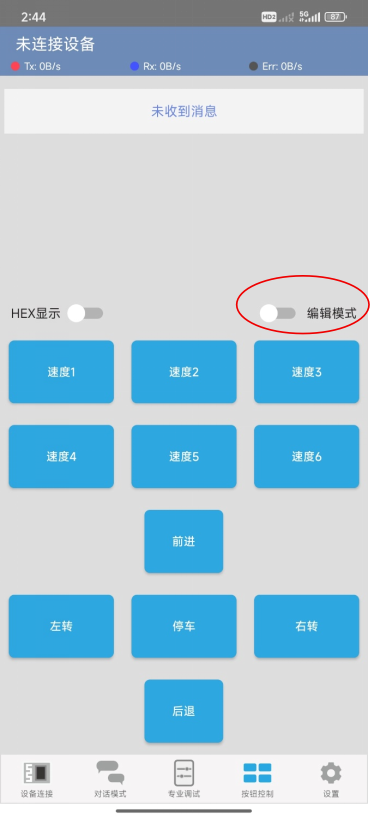 注意:遥控时需取消“编辑模式”勾选;配置按钮时则需勾选“编辑模式”并选择“HEX”格式。
注意:遥控时需取消“编辑模式”勾选;配置按钮时则需勾选“编辑模式”并选择“HEX”格式。
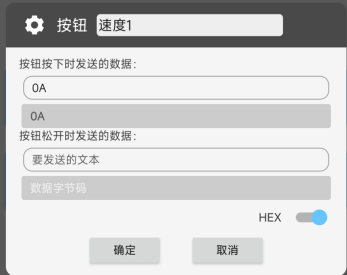
按钮指令配置示例:
各功能按钮需发送特定的十六进制指令,以下为部分示例:
- 前进:按下发送
01,松开发送 05(松开即停)。若需松开后保持前进,则删除松开发送栏的 05。
- 后退:按下发送
02,松开发送 05。
- 左转:按下发送
03,松开发送 05。
- 右转:按下发送
04,松开发送 05。
 (其他按钮配置类似,详情请参考资料文档)
(其他按钮配置类似,详情请参考资料文档)
连接步骤:
- 给哈基汪开发板上电。
- 打开手机蓝牙及蓝牙调试器APP。
- 在设备列表中查找并连接名为“XLBLE”的设备。
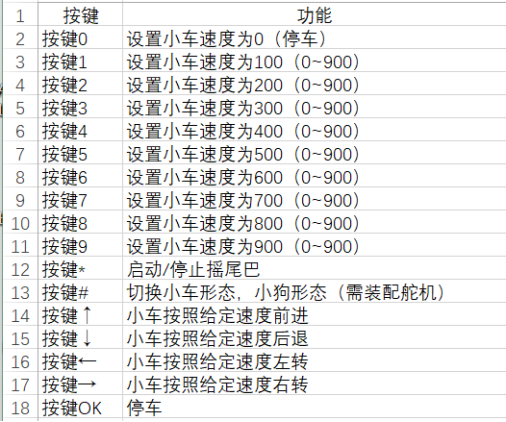
2. 红外遥控指令集
红外遥控器各按键对应的功能指令如下:
3. 超声波避障功能
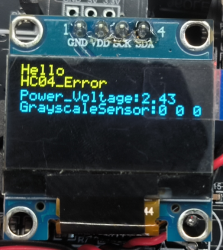
功能自检: 上电后,OLED屏幕会显示超声波状态。
- 显示
HC04_Error:表示超声波模块异常(接触不良、电压不足或超出量程)。
- 显示
Distance: XX cm:表示模块正常,并实时显示前方障碍物距离。
 超声波异常提示
超声波异常提示
 超声波正常测距
超声波正常测距
工作原理: 当小车处于前进状态时,若检测到前方障碍物距离小于10cm,会自动执行约1秒的左转或右转进行避障,随后继续前进。
4. 语音控制模块
语音模块通过串口与主控板通信,支持特定口令控制。
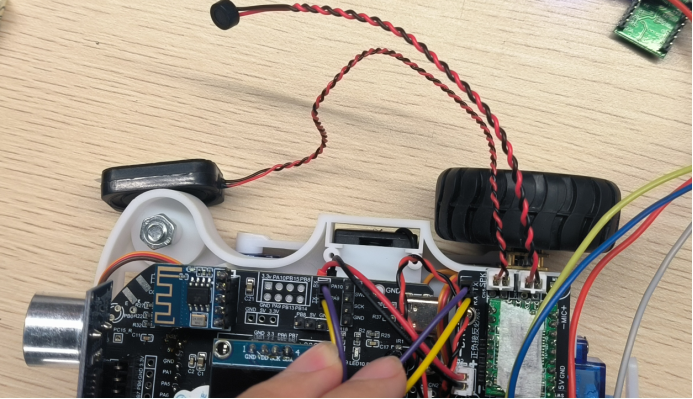
指令集与接线图:


接线方式:
- 主控板 RX 接 语音扩展板 TX(图示黄色线)
- 主控板 TX 接 语音扩展板 RX(图示紫色线)
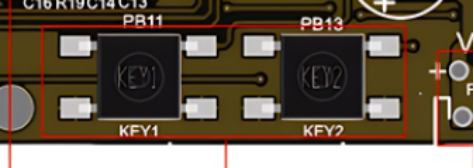
5. 板载按键功能
不同固件版本,按键功能不同:
- 基础版程序 (
basic_car_cw32L012):
- KEY1(左键):按下停车。
- KEY2(右键):按下前进。
- 升级版程序 (
pro_car_cw32L012):
- KEY1(左键):按下切换前进/停止。
- KEY2(右键):按下切换小车/四足形态。
6. OLED显示信息
OLED屏幕实时显示系统状态:
- 第一行:系统状态/提示。
- 第二行:超声波状态(
HC04_Error 或 Distance: XXcm)。
- 第三行:电池电压(单位:V)。
- 第四行(仅基础版程序):循迹状态,以三位二进制数显示左、中、右灰度传感器状态(
1表示检测到线,0表示未检测到)。
7. 循迹功能(基础版扩展)
该功能使小车能沿预设的黑色轨迹线行驶。
使用流程:
- 将小车置于轨迹地图的白色背景区域上电(或按复位键),系统将记录此时的地图颜色作为基准。
- 操控小车运动。当灰度传感器检测到与基准色差异过大(即遇到黑线)时,会自动执行循迹逻辑。
- 若未检测到线,则按指令正常运动。
灵敏度调节: 若循迹效果不理想,可调整 main.c 文件开头的 Threshold(循迹阈值)变量。
8. 四足形态功能
注意事项: 下载四足形态固件后,首次上电所有舵机处于收拢状态。请务必在通电且舵机接线正确后,再安装腿部塑料零件。
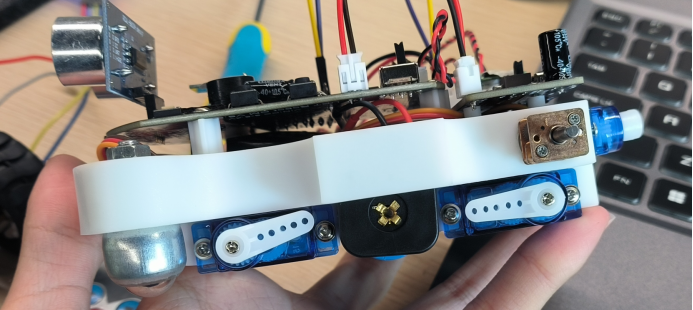
功能特性: 在四足形态下,依然支持蓝牙、红外、语音等多种方式进行控制(前进、后退、转向等),并可通过红外#键或板载KEY2键与轮式形态随时切换。
作为一款集成多种感知与控制功能的嵌入式开发平台,CW32L012哈基汪为学习和实践物联网与边缘智能设备开发提供了丰富的实验场景。 |  发表于 2025-12-12 23:05:12
|
查看: 205|
回复: 0
发表于 2025-12-12 23:05:12
|
查看: 205|
回复: 0