很多嵌入式项目一开始都很简单:一个按键、一个 LED、一个超时判断、一个错误处理。写着写着,loop() 里就堆满了 if、else if、标志位、计时变量和各种“临时补丁”。代码虽能运行,但几周后再改需求时,你还敢保证改一个分支不会牵连其他逻辑吗?
SimpleFSM 要解决的正是这个问题。它是一个面向 Arduino、ESP8266、ESP32 等平台的有限状态机库。对于嵌入式软件来说,它特别适合用来管理 UI 菜单、设备启动流程、通信连接流程、电机控制流程、故障保护、低功耗策略等场景。如果想深入了解 C++ 在嵌入式开发中的更多实践,可以查阅相关 C/C++ 技术资源。
SimpleFSM 是什么
github 链接:https://github.com/LennartHennigs/SimpleFSM
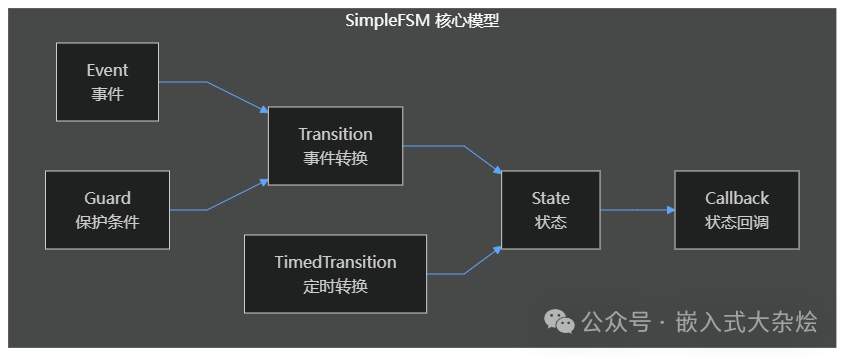
有限状态机,简单说就是:系统在任意时刻只处于一个明确状态;外部事件、定时条件或内部判断会触发状态转换;转换时可以执行动作。
SimpleFSM 把这套模型封装成几个核心对象:State 表示状态,Transition 表示事件触发的转换,TimedTransition 表示定时转换,SimpleFSM 负责保存状态表、转换表并在 loop() 中调度。
它能处理哪些问题
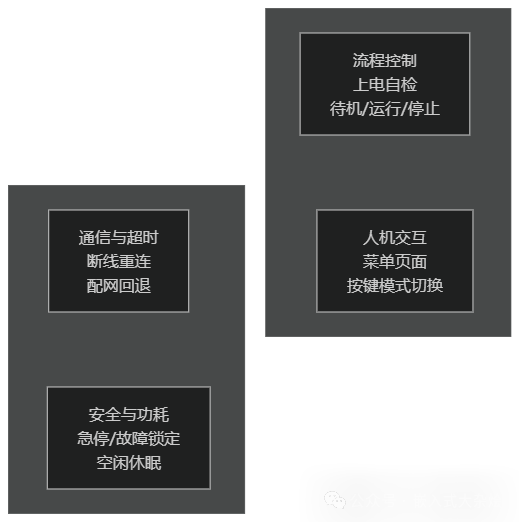
第一类是流程型问题。比如设备上电后要自检,自检成功进入待机,用户按键后开始运行,运行完成后回到待机,出错后进入故障态。这类逻辑如果靠多个布尔变量维护,很快就会出现“变量组合爆炸”。状态机则要求你把每个状态和转换条件列出来。
第二类是时间型问题。嵌入式系统里常见“进入某状态后 3 秒自动下一步”“无人操作 30 秒进入休眠”“通信连接超过 5 秒未成功就超时”。
第三类是安全型问题。急停、故障、复位、超时保护往往要求“无论系统在哪里,都能立即进入安全状态”。SimpleFSM 提供全局转换,可以从任意状态跳转到指定状态,适合急停、错误处理、系统复位、低功耗入口。
使用 SimpleFSM 的基本步骤
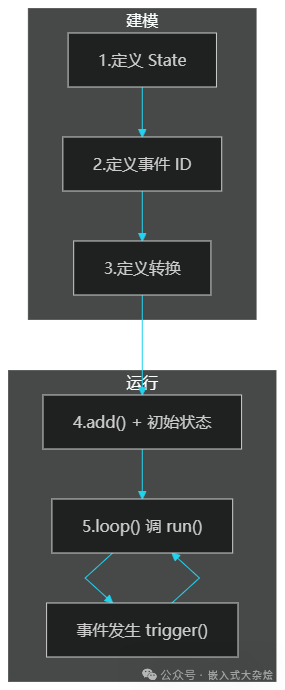
使用时通常分五步:定义状态、定义事件编号、定义转换、设置初始状态、在 loop() 中周期调用 fsm.run()。如果有按键、串口命令、传感器报警,就在检测到事件时调用 fsm.trigger(EVENT_ID);如果有自动超时,就用 TimedTransition;如果转换需要先判断条件,就加 Guard 函数。
需要注意一个工程细节:State 对象要放在全局或静态生命周期中,不要在普通函数里临时创建后把指针交给 FSM。在当前 2.x 用法中,建议使用 State*[] 形式添加状态,并且 fsm.add() 会返回 FSMError,工程代码中建议检查返回值。
Demo:智能风扇控制器
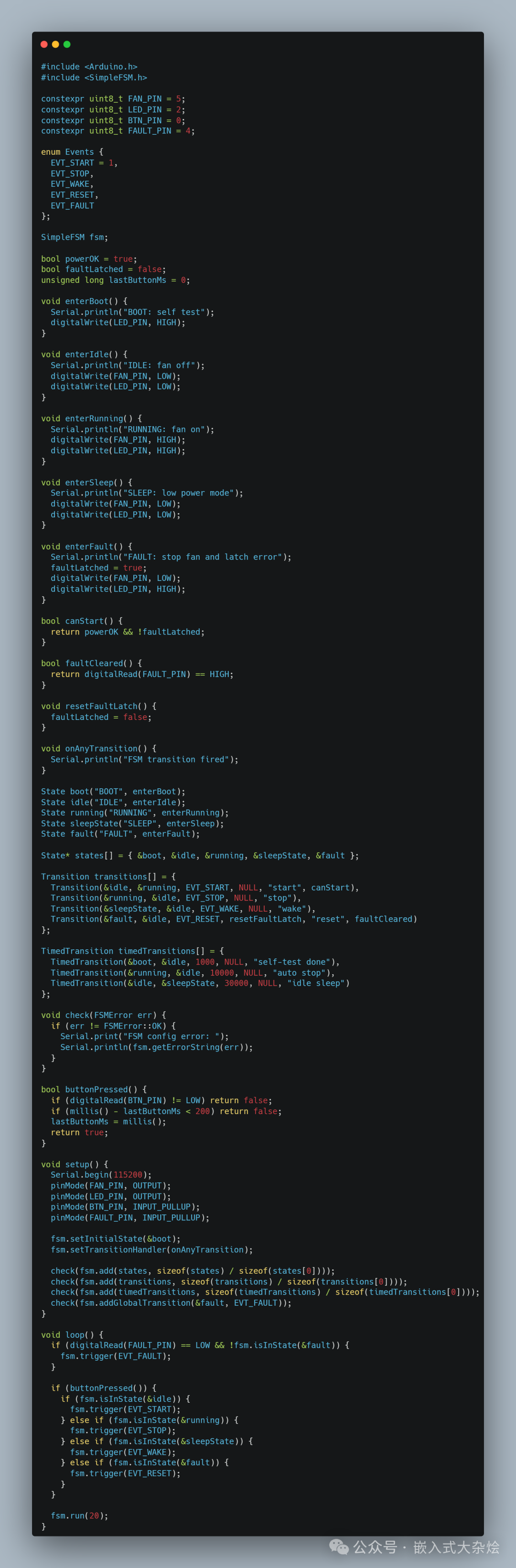
下面这个 demo 模拟一个小型智能风扇控制器。
它有 5 个状态:BOOT 上电自检、IDLE 待机、RUNNING 运行、SLEEP 休眠、FAULT 故障。
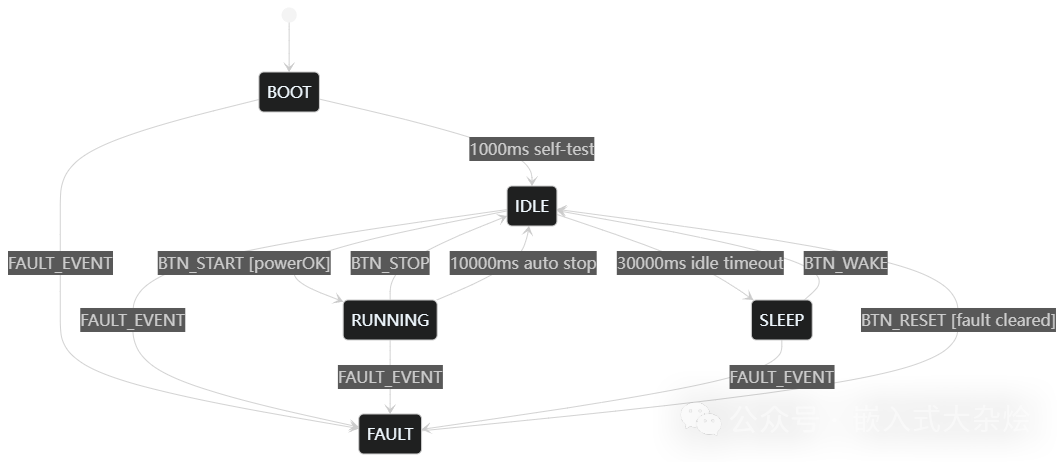
按键可启动/停止风扇;运行 10 秒后自动回到待机;待机 30 秒后自动休眠;任意状态检测到故障都会进入 FAULT;故障解除后按键复位回到 IDLE。
为了展示 Guard,IDLE -> RUNNING 只有在供电正常且没有故障时才允许发生。
这里假设故障输入为低电平有效,高电平表示故障解除;阅读代码时,可以先看 State、Transition 和 TimedTransition 三张表,硬件 IO 部分不必逐行深究。
Demo 解析
这段代码最重要的不是“风扇”,而是结构。State 把每个模式的入口动作放在一起,例如进入 RUNNING 就打开风扇,进入 FAULT 就立即关风扇并锁存错误。这样做的好处是:状态动作跟状态本身绑定,不会散落在多个 if 分支里。
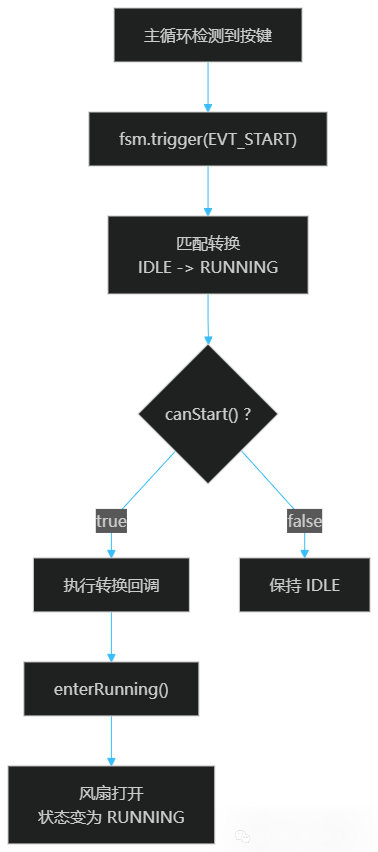
Transition 表示事件驱动转换。比如 IDLE -> RUNNING 由 EVT_START 触发,但还要经过 canStart() 检查。这个 Guard 非常适合表达“允许启动的前置条件”,例如电压正常、温度正常、互锁开关闭合。业务代码不用到处判断 powerOK,状态机只在转换边上判断。
TimedTransition 表示非阻塞定时转换。BOOT -> IDLE 是 1 秒自检完成,RUNNING -> IDLE 是自动停止,IDLE -> SLEEP 是空闲休眠。它们都依赖 fsm.run(20) 周期调度,所以主循环仍然可以继续响应故障输入和按键,不会被 delay() 卡住。
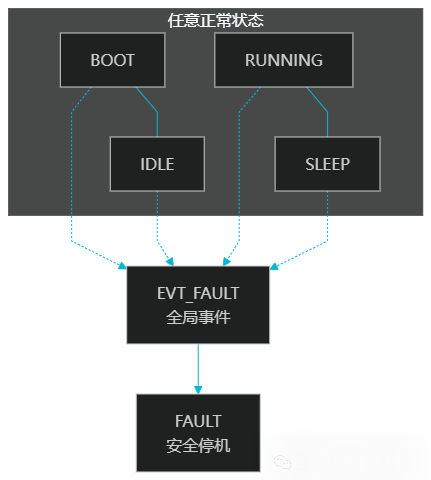
全局转换是安全控制的关键。fsm.addGlobalTransition(&fault, EVT_FAULT) 的含义是:只要触发 EVT_FAULT,无论当前在 BOOT、IDLE、RUNNING 还是 SLEEP,都跳到 FAULT。实际产品里,过流、过温、急停、门禁打开等事件都可以这样建模。它把“安全优先级最高”从代码习惯变成了明确的状态机规则。
和传统写法相比
传统 if-else 写法的优势是上手快,少量状态时很直接。状态机并不是要替代所有分支判断,而是适合状态数量、事件数量和异常路径同时增长的场景。
当状态超过 4 个,事件超过 5 个,再叠加超时、错误、复位、低功耗,维护成本会快速上升。状态机写法一开始多了建模步骤,却能把复杂度固定在状态图和转换表里。
另外,SimpleFSM 可以通过 getDotDefinition() 导出状态图定义,便于评审和调试。

它还提供一些工程上很实用的能力:可以设置 final state 和 finished handler,适合一次性流程;可以通过 getState()、getPreviousState()、isInState() 查询当前状态;可以通过 getLastError()、getErrorString() 处理配置错误;内部对状态数、普通转换数、定时转换数有安全上限,避免过度分配内存。
嵌入式项目中的使用建议
第一,先画状态图,再写代码。只要你无法清楚画出系统有哪些状态、哪些事件、哪些异常路径,就说明代码里也会模糊。
第二,事件编号建议用 enum 管理,并从 1 开始,避免 0 被误用。
第三,状态回调里只做“进入该状态必须做的事”,不要把所有业务都塞进回调,否则状态机也会变成另一种大泥球。
第四,fsm.run() 要持续调用,尤其是用了 TimedTransition 时。它不是阻塞等待,而是每次进来检查时间是否到了。
第五,Guard 函数要短小、确定,最好只读取当前条件,不要在 Guard 里做复杂副作用。
第六,安全相关转换优先考虑全局转换,把故障态设计成“默认安全输出”,例如关电机、关加热、锁存报警。
对嵌入式开发者来说,掌握 SimpleFSM 这类轻量状态机库,往往比多写几层 if-else 更接近可维护的软件设计。如果你正需要更系统的状态管理方案,欢迎常来云栈社区的技术文档板块看看,那里沉淀了大量硬件与底层开发的避坑指南。
 发表于 2026-5-24 21:46:52
|
查看: 122|
回复: 0
发表于 2026-5-24 21:46:52
|
查看: 122|
回复: 0
