一、激光雷达概述
激光雷达(Light detection and ranging, LiDAR)通过目标点云或像素的距离值来估计三维(3D)形状,在自动驾驶、机器人导航、地形测绘和遥感等非结构化环境感知中获得了快速发展。
与仅能恢复环境光照明场景的被动 3D 成像技术不同,LiDAR 可以主动获取周围环境的 3D 信息,并搭配点云生成、噪声滤波、坐标配准、特征描述等算法实现场景理解。
根据光探测方法的不同,现有 LiDAR 通常分为直接探测和相干探测两大类。直接探测使用脉冲光,通过光电探测器检测目标回波强度。典型的非相干 LiDAR 基于飞行时间(Time-of-flight, TOF)测距,凭借成熟的硬件与信号处理方案占据主导。然而,TOF‑LiDAR 的探测距离和分辨率受限于光电探测器性能与脉冲激光器峰值功率,且回波信号可能被阳光或其他雷达激光束干扰。
与之相对,相干探测利用回波光束与本振光束的光混频技术,能有效抵抗环境光干扰并提高信噪比。传统 LiDAR 主要依赖强度、3D 坐标或速度成像,信息维度不足导致识别与分类能力有限,尤其在目标点云确定上存在歧义,进而影响 3D 形状的识别确定性。一种可行的方法是引入光的偏振分量,通过分析偏振光与材料的相互作用,推断目标的结构与成分信息。偏振相干 LiDAR 融合了光学、机械、控制、电子信息等多学科前沿,涵盖信息探测、光束扫描、偏振成像等核心理论。
二、信息探测技术
LiDAR 的信息探测技术大致分为直接探测和相干探测两类:前者主要包括 TOF 测距和光子计数测距,后者主要包括伪随机码相干测距和频率调制相干测距。无论哪种方式,其核心都是测量光束在 LiDAR 系统与目标之间的往返传播时间,进而解算距离。不同的是,直接探测只能获取光强和距离信息;而相干探测通过增大本振光束功率实现对微弱回波光束的放大测量,除了光强和距离,还可获取频率、相位等信息。
三、直接探测
TOF 测距
TOF 测距使用周期性脉冲光束照射目标,脉冲到达物体表面后形成后向散射回波,被 LiDAR 接收模块探测。通过测量脉冲往返时间,即可获得目标距离。
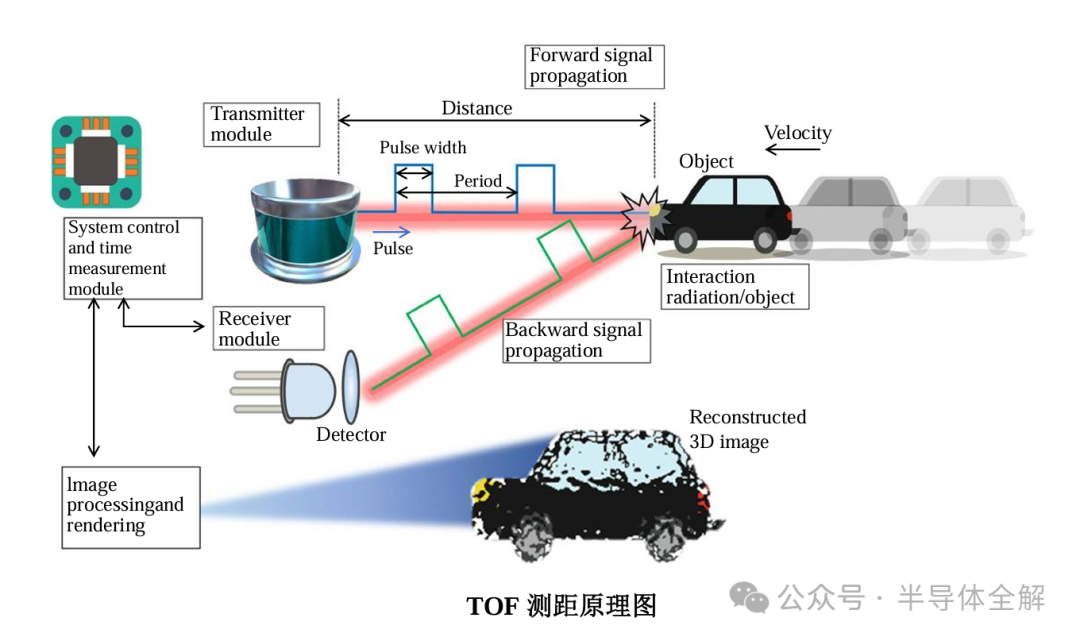
发射模块一般选用高功率发光二极管或锁模光纤激光器;接收模块则采用高性能光电探测器并配备窄带滤光片,以减少太阳光或其他雷达激光的干扰。目前,TOF 测距的最小时间测量精度约 0.2 ns,最小距离精度约 3 cm。商用 TOF‑LiDAR 受探测灵敏度限制,测量距离通常在 100‑200 m,而科研级 TOF‑LiDAR 最大可扩展至千米量级。
光子计数测距
光子计数测距将 TOF 与光子计数探测相结合,利用时间相关单光子计数(TCSPC)技术对回波光束进行时间累积和波形恢复,通过探测单个光子的到达时间,极大提升系统灵敏度和时间分辨率,从而实现数百公里的信息探测。
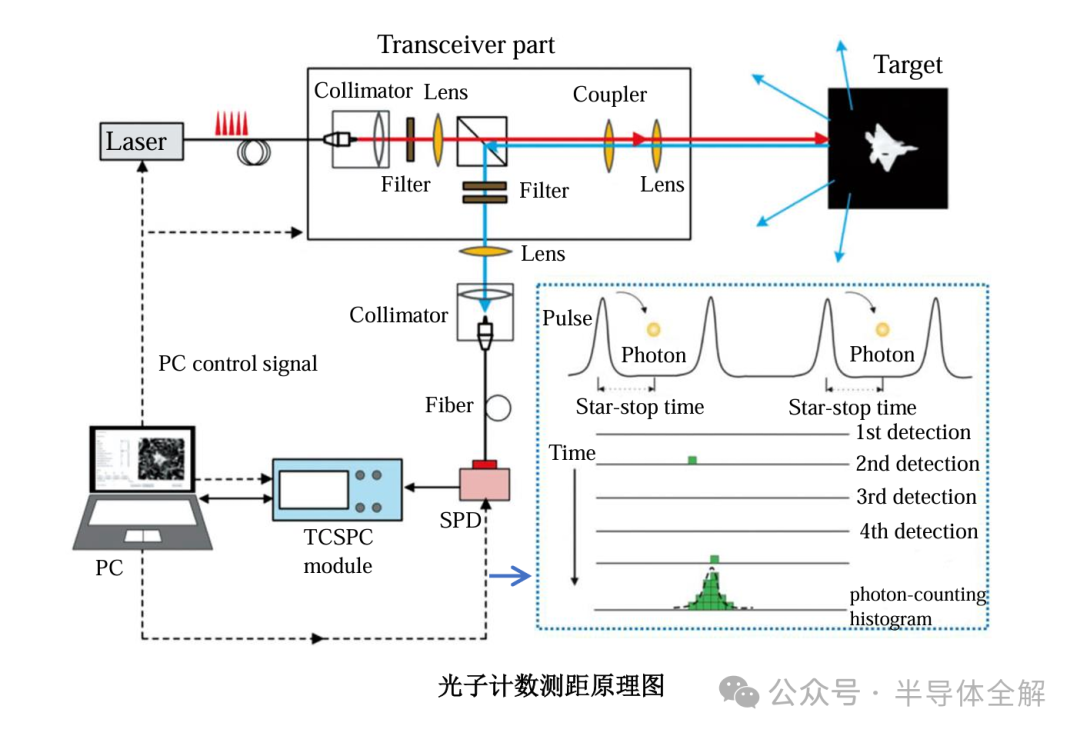
该方法距离测量精度主要取决于激光器脉冲宽度和 LiDAR 系统定时精度,空间分辨率则受光学系统衍射极限限制。当前光子计数测距的最大测量范围已超过 200 km,最小距离精度约 3.5 cm。
四、相干探测
伪随机码测距
伪随机码测距利用伪随机序列产生幅度、频率或相位周期性变化的连续激光;与目标相互作用后,将回波信号与本地伪随机码进行相关运算,在目标位置出现尖锐峰值以确定距离。早期 LiDAR 领域中的伪随机码测距多为强度调制(属非相干探测),直到 1998 年,日本三菱电机 Asaka A 等人首次提出基于伪随机码频率调制的相干测距方案,开启了伪随机码在相干探测中的应用。
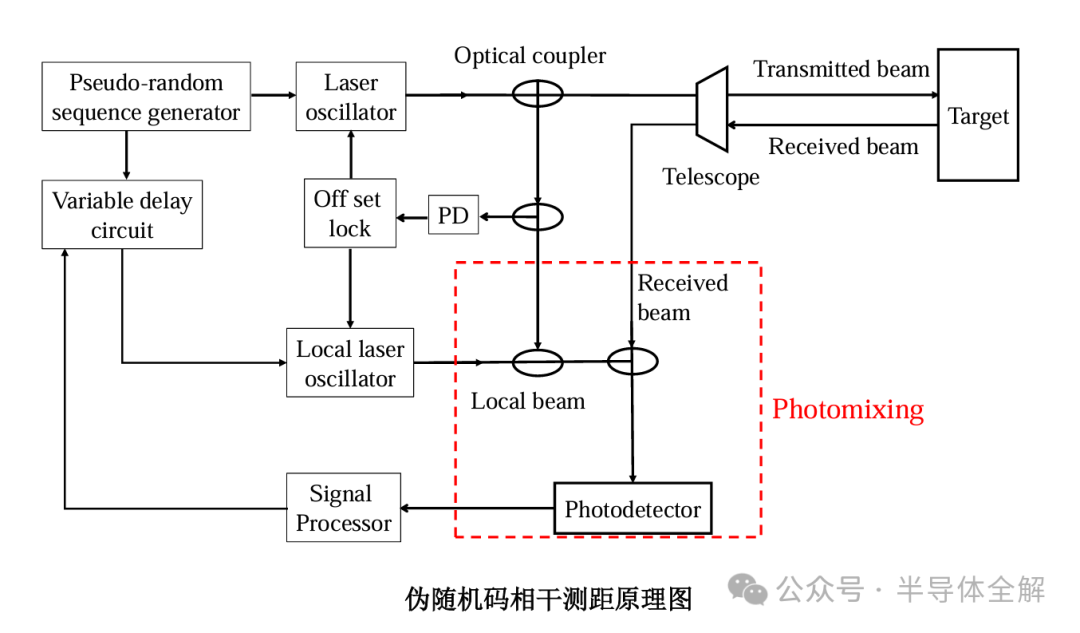
该方案使用时间延迟的伪随机序列调制本振光束,再将回波光束与本振光束在光场中同时进行相干探测和相关运算,从而降低目标虚警率并提高信噪比。
频率调制测距
频率调制测距利用调频信号产生功率恒定、频率周期性变化的激光,通过测量回波光束与本振光束之间的时延频差和多普勒频移差,解算出目标的距离和速度。
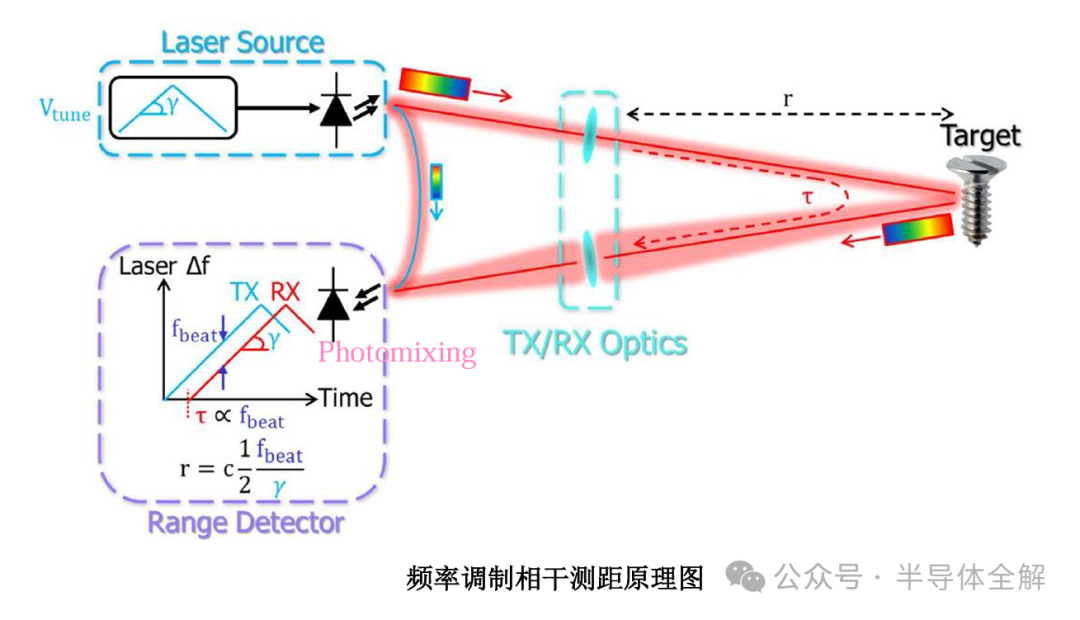
需注意,频率调制测距的发射光束和本振光束均为调频光束。常见的调频波形包括正弦形、锯齿形、等腰梯形和对称三角形,实现途径分为内调制(腔长调谐、电流注入调谐等)和外调制(电光调制器、循环移频结构等),结合迭代学习策略可克服激光调制中的非线性效应。
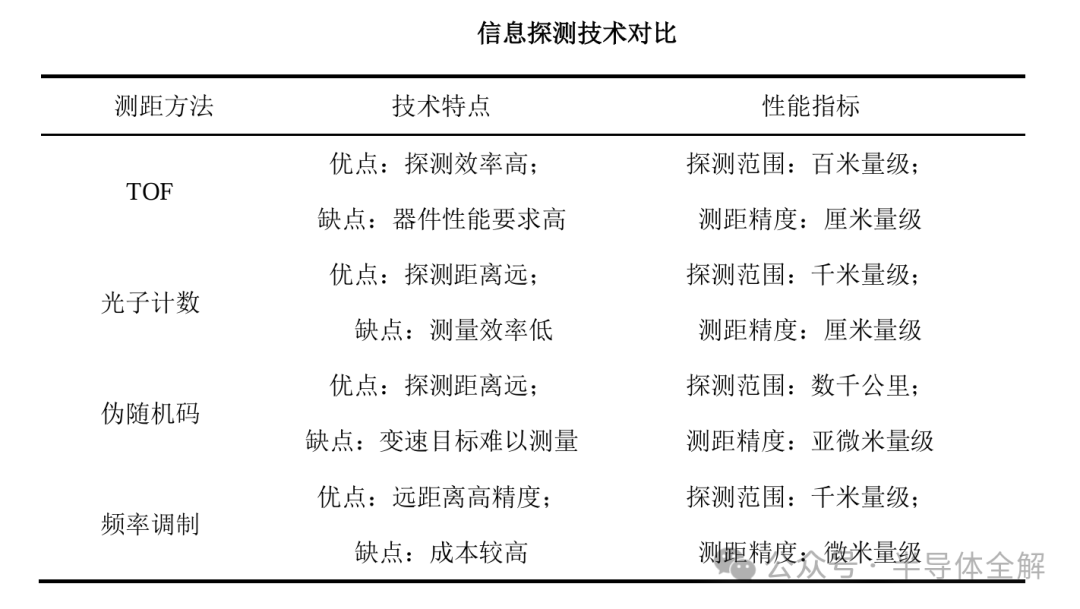
五、信息探测技术对比
TOF 测距原理简单、探测高效,但精度受限于激光器脉宽和探测器灵敏度,且易受环境光影响。光子计数测距通过脉冲累积实现远距离探测,但测量效率较慢,难以满足动态场景的实时需求。伪随机码测距可在低信噪比下实现远距离测距测速,但对变速目标需实时多普勒补偿,实施难度大。频率调制测距则能同时获取距离和速度信息,并兼顾探测范围、测量精度、效率和灵敏度等多方面要求。因此,近年来频率调制测距在远距离、高分辨率 LiDAR 信息探测中表现突出。
六、光束扫描技术
(1)机械扫描与固态扫描
LiDAR 的光束扫描大致分为动态机械光学扫描和固态光学扫描两类:前者主要包括转镜和转台,后者主要包括微机电系统(MEMS)和光学相控阵(OPA)。
动态机械光学扫描使用机械运动机构驱动反射镜或转台实现光束偏转。如图(a)所示,在 LiDAR 内部引入一维反射镜实现垂直方向偏转,结合转台基体实现水平方向偏转;或如图(b)所示,引入两个独立偏摆反射镜分别负责垂直和水平偏转。
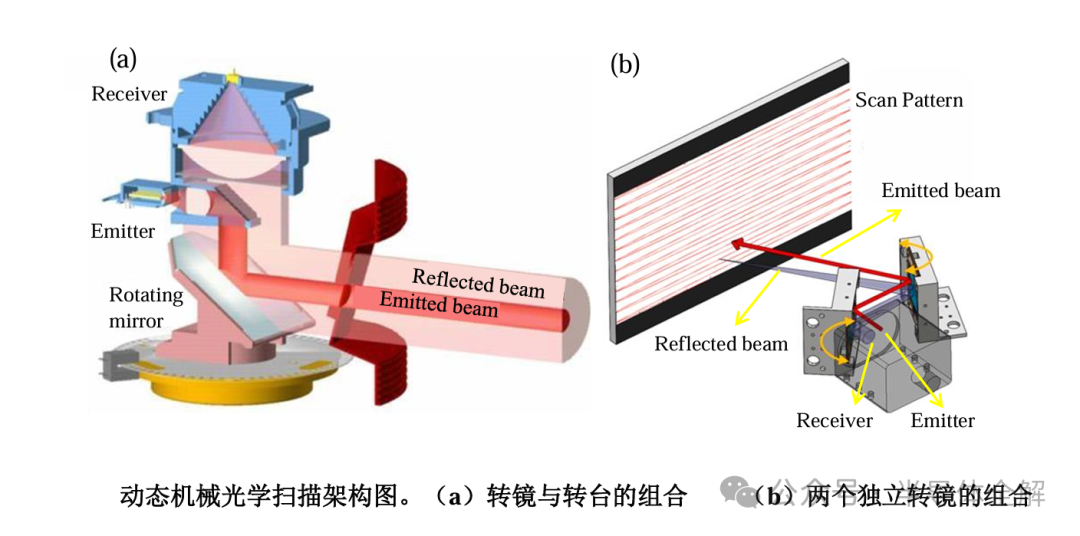
这种方法原理简单、性能稳定、技术成熟,但依赖反射镜偏摆或转台旋转来扩大视场,导致系统结构复杂、体积庞大、转动惯量增加,扫描速度与分辨率受限,难以满足高可靠性 3D‑LiDAR 的成像要求。
固态光学扫描通过光电器件调控光束的相位、偏振或方向实现扫描。MEMS 振镜利用电热、电磁、静电或压电效应控制偏转方向,大幅缩减运动部件尺寸与重量,为 LiDAR 的集成化和轻量化提供可能。
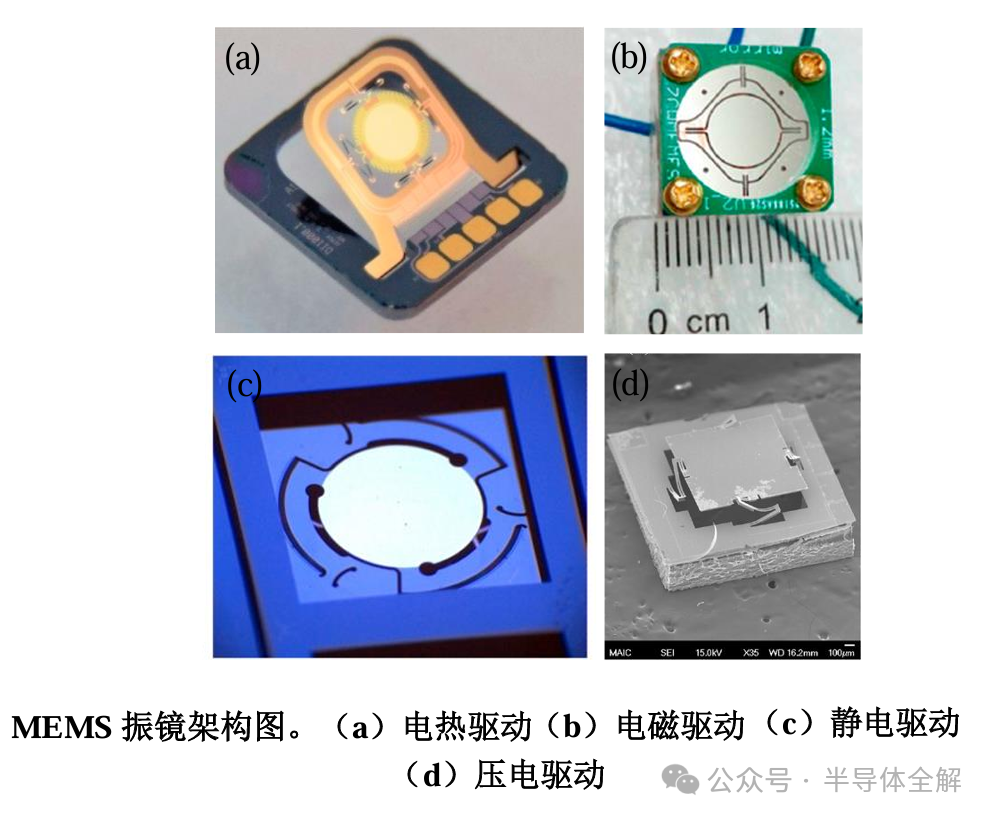
不过,MEMS 振镜易受振动、磨损、冲击和机械疲劳影响,同时面临扫描口径与扫描速度之间的取舍。OPA 扫描方法利用多路光学调制阵列构建调制光场,通过相位控制在发射天线端产生不同波前倾斜,实现远场全固态光束扫描。
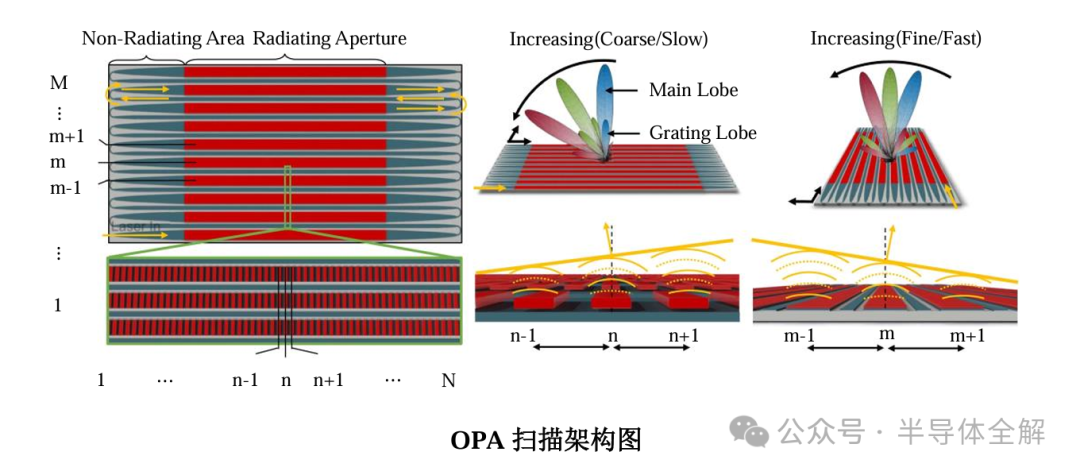
但 OPA 面临阵列串扰、功率限制、旁瓣压缩等问题,其探测距离、角分辨率、视场范围等指标也受限于当前制造工艺,相关产品尚未大规模推向市场。
(2)级联棱镜扫描
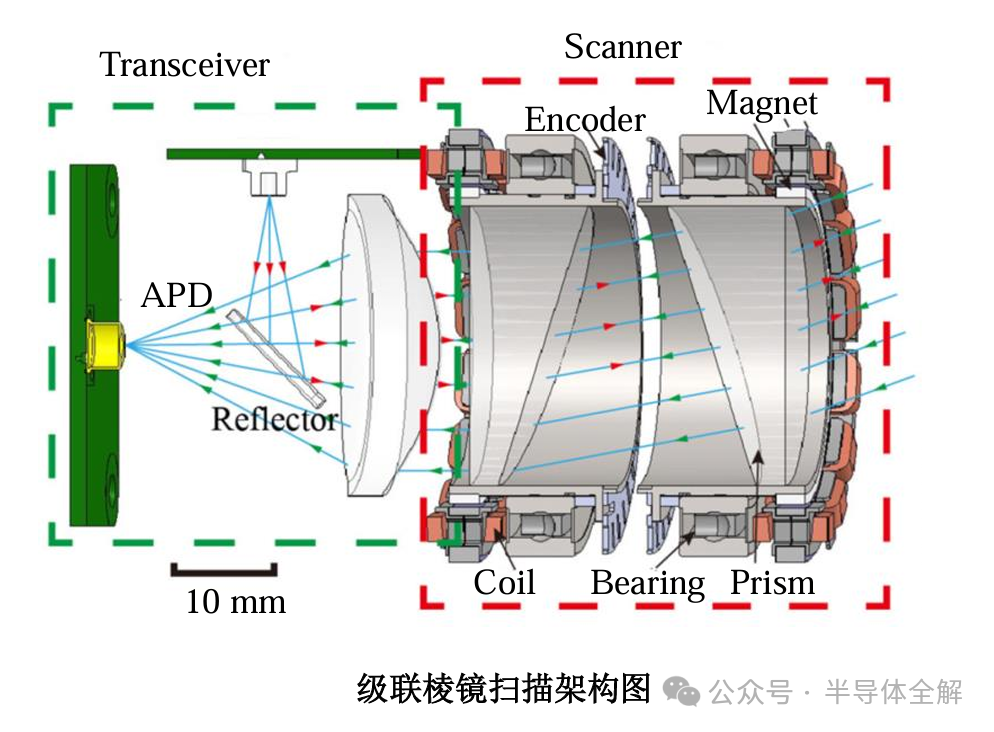
在动态机械扫描与固态扫描之间取得良好平衡的级联棱镜(Risley 棱镜)扫描机构,具有结构紧凑、孔径共形、指向精度高、转动惯量小等优势,且正向/逆向解、扫描图案、性能评定等研究已趋完善,逐渐成为极具潜力的 LiDAR 扫描方案。
级联棱镜扫描机构通过共轴布置且独立旋转的两片楔形棱镜实现光束扫描。与相干探测技术结合时,可获取目标的反射强度、距离、速度、3D 坐标等信息,在一定积分时间内生成非重复扫描的 3D 点云。
早期级联棱镜扫描 LiDAR 普遍使用 TOF 测距,在有限发射功率下难以兼顾探测距离、效率和精度,也未能充分发挥级联棱镜在成像灵活性、视场范围和角分辨率方面的优势。2018 年,科研团队提出基于级联棱镜单光束扫描和频率调制测距的 LiDAR 成像系统,完成室外 500 m 距离的 3D 建筑成像实验,获得高分辨率 3D 点云;2023 年,该团队又提出基于级联棱镜多光束扫描和频率调制的自适应 LiDAR 成像系统,完成室外 500 m 距离的建筑群成像实验,获得视场范围 60°、空间分辨率高达 1.1 cm 的 3D 点云。
七、结论
下表总结了光束扫描技术的主要特点。
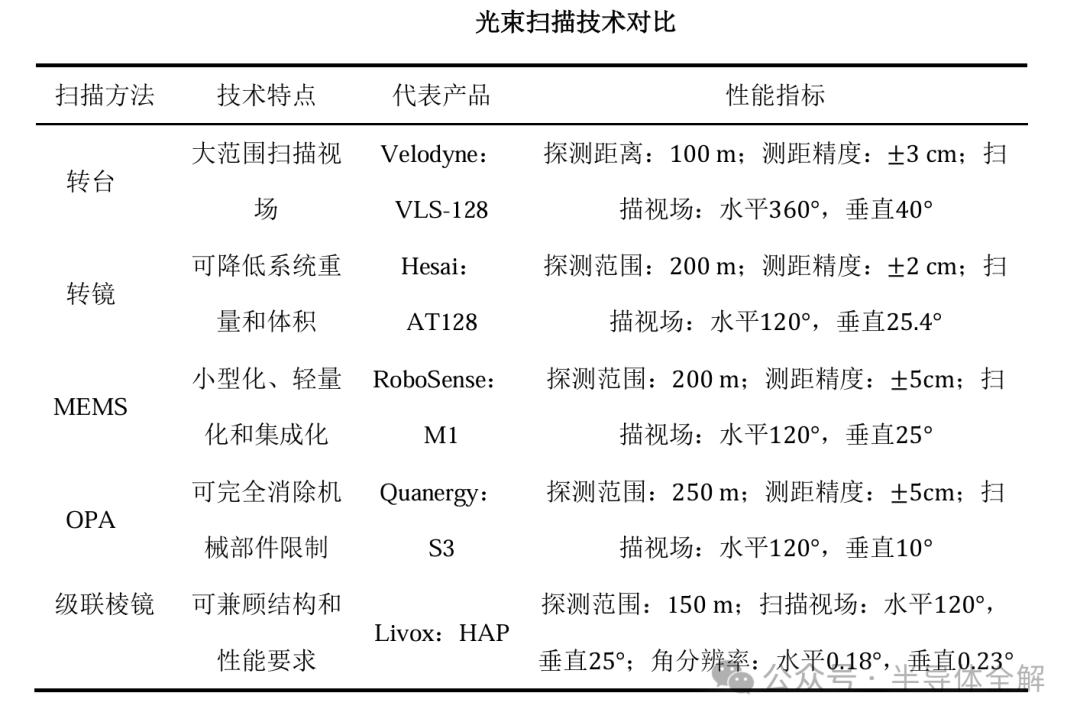
机械转台扫描原理简单、技术成熟,但复杂机械结构带来较高制造成本与繁琐装配调试,较大体积和转动惯量也限制了扫描速度与角分辨率。机械转镜扫描通过光学元件的局部运动替代转台整体运动,一定程度降低了重量、体积与功耗要求,但大尺寸反射镜偏摆或旋转时转动惯量仍较大,且角分辨率对动态误差敏感。MEMS 振镜扫描具有小型化、轻量化、易集成的优势,但面临扫描口径与速度的取舍,并易受振动、磨损、冲击和机械疲劳影响。OPA 扫描消除了传统机械部件带来的诸多问题,借助微纳光学向无惯量、低功耗方向发展,但面临阵列串扰、功率限制、旁瓣压缩等问题,同时探测距离、角分辨率、视场范围等指标受制造工艺制约。相比之下,级联棱镜扫描可有效规避机械扫描的重量、体积、转动惯量等问题,又能突破固态扫描在系统可靠性、误差敏感性和环境适应性等方面的限制,成为极具潜力的 LiDAR 扫描方案。
参考文献:
(1) 张龙坤. 偏振相干激光雷达成像与表征关键技术研究[D].
(2) 陈柏松. 硅基光学相控阵芯片的研制及其激光雷达成像技术的研究[D].
(3) 张功. 大功率分布式布拉格反射激光器及其在调频连续波激光雷达中的应用[D].
(4) 丛阳滋. 联合多源点云的激光雷达三维建图与更新[D].
 发表于 2026-5-26 03:40:53
|
查看: 145|
回复: 0
发表于 2026-5-26 03:40:53
|
查看: 145|
回复: 0
