继2025年之后,2026年,“智能体”(Agent)继续成为整个科技领域最炙手可热的名词之一。从能自主写代码的编程助手,到会操作浏览器、跨系统办事的“数字员工”,热浪之下却藏着一个危机:这个火遍产业界的概念,至今仍没有一个公认的定义。
这个概念其实由来已久。“Agent”一词源自哲学,本指有意图、能行动的主体;进入人工智能后,经罗素与诺维格的经典教材《人工智能:一种现代方法》正式确立——智能体被定义为“能通过传感器感知环境、并通过执行器作用于环境的事物”。它的中文译名也几经周折,“代理”“行为体”等说法争论多年,直到由全国科学技术名词审定委员会审定为“智能体”,并给出“体现自治性、反应性、社会性等智能特征的软硬件实体”这一官方释义。
进入大模型时代,智能体的定义反而进一步分化。这一点在产业界表现得尤为明显。2026年1月,美国战略与国际研究中心(CSIS)发布报告《迷失于定义:AI智能体定义混乱如何削弱美国治理框架》,对当下主流科技企业与咨询机构给出的“智能体”定义做了一次集中盘点,结果颇能说明问题。
OpenAI 把智能体描述为“能在较长时间跨度内持续推进既定目标、无需事先脚本化每一步行为的系统”,并提出用“代理度”(agenticness)来刻画其自主程度;Anthropic 则把“agent”一词严格保留给“以大模型为核心的循环系统,由模型自身决定调用哪些工具、按什么顺序、何时停止”,而把更宽泛的工具型流程归入“agentic systems”。
IBM 强调智能体是“能独立组装工作流、调用可用工具完成任务的 AI 系统”;AWS 把它定义为“与环境交互、采集数据、并据此自主完成预定人类目标的软件”;谷歌云的定义则包含“推理、规划、记忆”以及“足以做出决策、学习和适应”的自主性。咨询机构的口径更宽——麦肯锡甚至把客服聊天机器人也视为“初级智能体”,而 IBM、OpenAI 等明确把聊天机器人排除在外。
CSIS 的研究者进一步把这些定义拆解到七个特征维度上:自主性、是否以大模型为内核、学习与反馈、记忆、推理与规划、协作、感知与观察。对照之下,唯一被各家普遍接受的只有“自主性”一项,而即使在这一项上,“什么才算自主”也莫衷一是——从只会按规则反应的简单反应式系统,到能根据历史经验自我更新的学习型系统,都被装进了同一个筐里。其余六个维度则呈现明显的“红黄绿斑驳”:有的家把记忆列为必备,有的避而不谈;有的强调多智能体协作,有的只字未提;有的要求具备感知通道,有的则把它视作可选项。
学界的图景同样分裂。符号主义看重逻辑推理,联结主义强调分布式表征,控制论关注反馈调节,具身认知则看重感知与行动的耦合,各家依旧使用着互不兼容的语言。
这种碎片化不只是学术上的不便。CSIS 报告指出,当“智能体”既可以指一个简单的聊天助手,也可以指一支具备作战能力的自主集群时,测试与评估、采购与合规、责任与问责,都会因为同一个词承载了截然不同的能力而陷入混乱,监管者可能照着聊天机器人的标准去审查一个本应受严格管控的高自主系统,也可能反过来用对待复杂自主系统的尺度去衡量一个不过是规则脚本的工具。当智能体已经长成一个真实的产业,连“它到底是什么”都莫衷一是,理论的系统发展与工程的标准化都会因此受阻。
一、跳出范式之争,回到第一性原理
科学史告诉我们,走出概念混乱的出路往往不是各方妥协,而是回到功能本质,重建一套最小的公理系统。
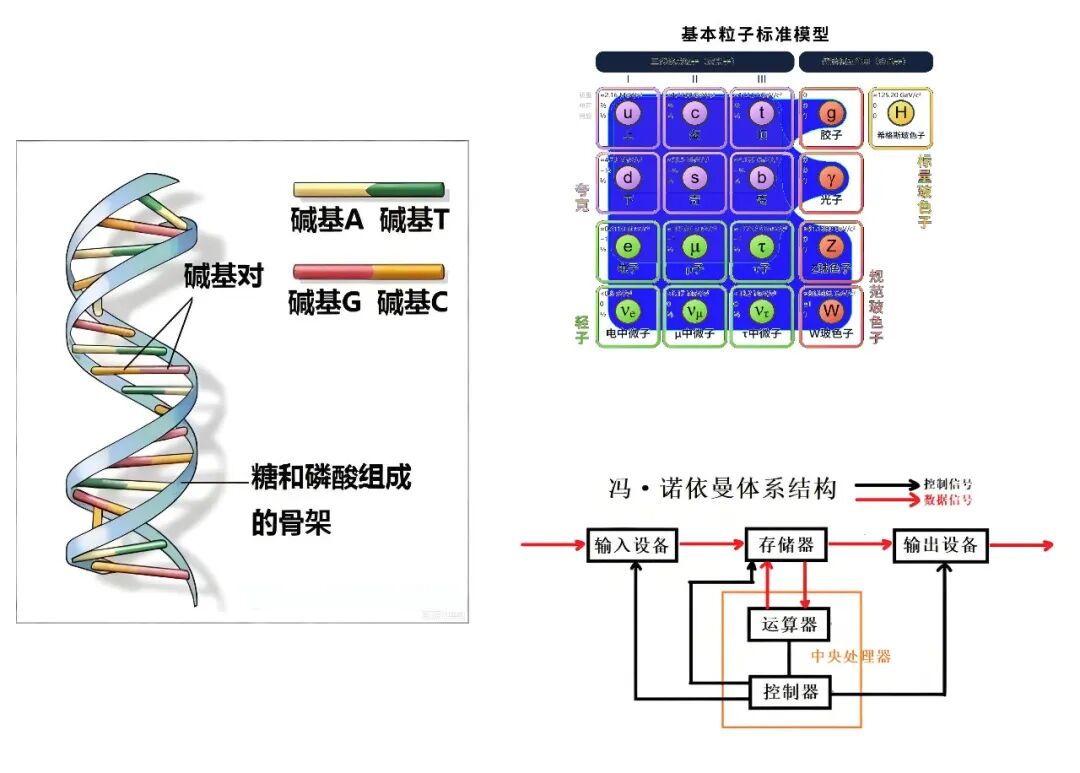
沃森和克里克用四种碱基确立了遗传编码的最小完备集,冯·诺依曼用五个部件定义了通用计算的完整过程,粒子物理的标准模型则用有限的基本粒子统一了物质与基本相互作用的描述。再往前看,细胞学说用“细胞是生命的基本单位”奠定了生物学的统一根基,热力学则用“能量守恒”厘清了物理世界的底层逻辑。这些奠基性的成就有一个共同的特点:不纠缠于物理细节的层层还原,而是在功能或原理的层面上做减法,用最小性换取逻辑上的完整。
沿着这条路,如果重新考察香农的信息论、薛定谔的开放系统理论、西蒙的人工科学、弗里斯顿的自由能原理,以及罗素的经典教程、谷歌的定义和中国科学技术名词审定委员会的审定,可以发现它们表面分歧之下藏着同一个内核:智能体本质上是一个开放信息处理系统。 从惠勒的“万物源于比特”到普里高津的耗散结构理论,这一判断在物理学、生命科学、认知科学与人工智能中反复出现。
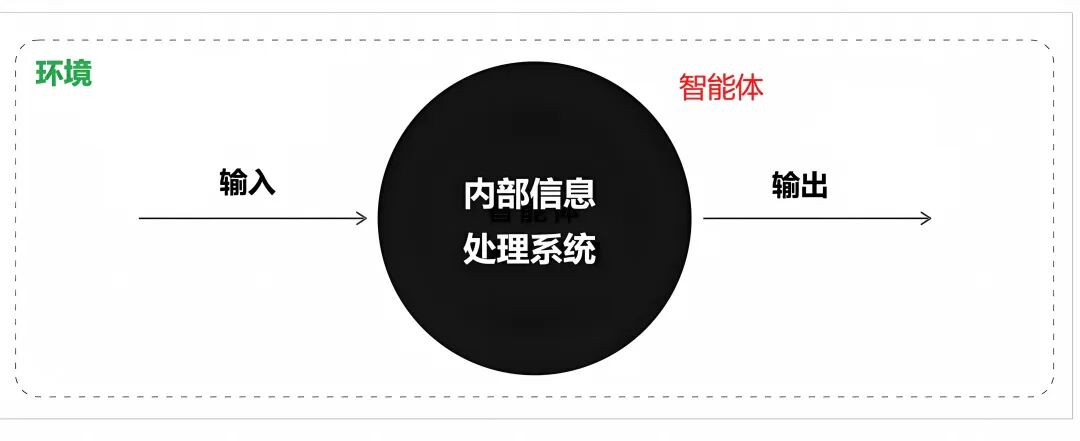
不妨将这个共同的内核当作一条公理。它其实蕴含两个彼此独立的侧面:一是“开放”,系统拥有一条区分自我与环境的边界,并跨越这条边界与外界交换信息;二是“信息处理”,系统在边界之内对信息进行加工。这两点合起来,恰好框定了一个智能体全部的本体特征。这条公理不依赖任何具体实现载体,无论碳基、硅基还是混合系统都同样适用,因而具备跨范式的本体论普遍性。
二、构建智能体最小完备架构
有了这条公理,接下来的问题就变得很纯粹:要让一个开放的信息处理系统从头到尾运转完整,最少需要几种功能?
我们可以把信息在系统里可能经历的过程逐一排查,看至少要哪些功能才能全部接住。归拢起来,可以沿着三个方向展开。
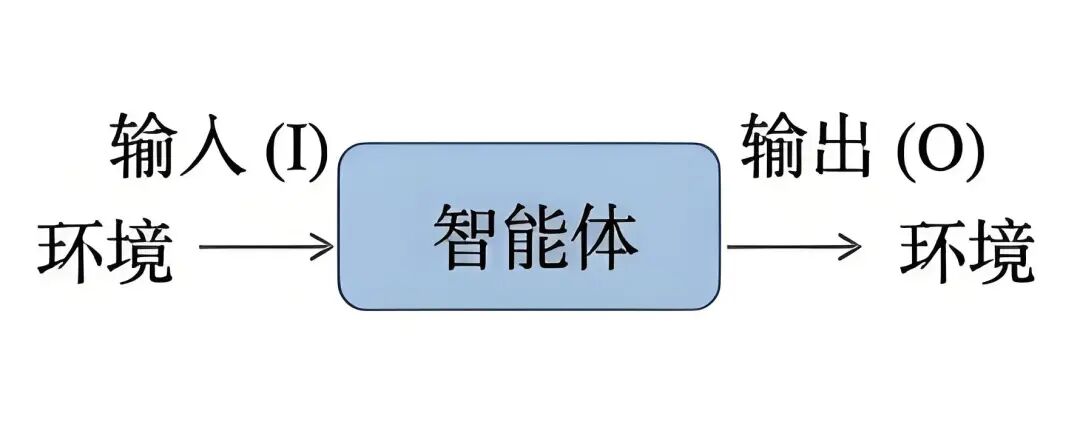
第一个方向是系统的边界。信息相对于“我”和“环境”这条界线,只有两种走向:进来,或出去。进来的是输入(I),出去的是输出(O)。缺了输入,系统就成了对外界一无所知的自循环,像一台只会照固定节奏走、却没法对时的钟表;缺了输出,它就成了“缸中之脑”——能感知、能记忆、能思考,却动弹不得,如同神志清醒却无法行动的闭锁综合征患者。
第二个方向是信息进来之后的内部处理。 这里同样有两件相互独立的事:把信息留住,还是造出新的信息。前者是记忆(M),后者是生成(G)。没有记忆,系统就只会对眼前的输入做即时反应、转头就忘,像一台学不会主人作息的简单恒温器;没有生成,它就只能照搬已有的内容,像一台只会播放录音、却谱不出新曲的录音机。
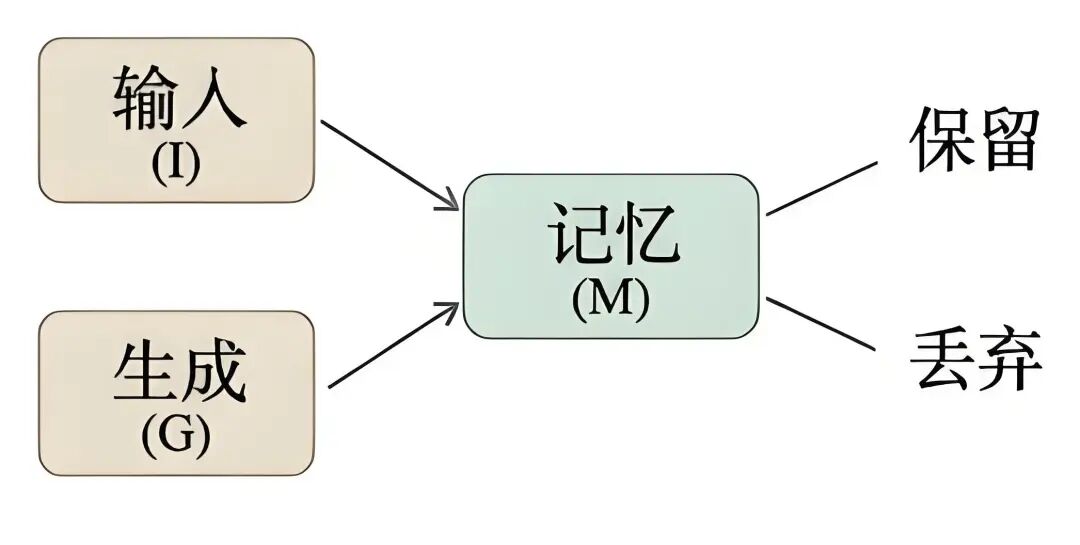
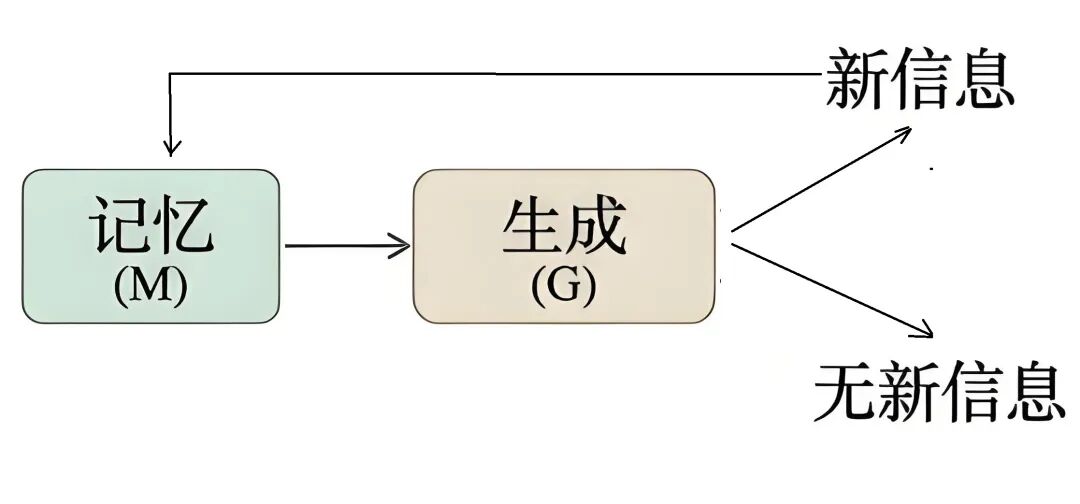
记忆和生成到底怎么区分?有一个很朴素的标准:经过这道工序,系统里的信息究竟是“多出了新东西”,还是只是被保留、调取或删除?多出新内容的,算生成;没有新增的,无论是存、是取还是删,都算记忆。如此一来,不管背后用的是掷骰子般的随机、按部就班的计算,还是复杂的推理,都能用“有没有变多”这把客观尺子来量,而不必纠缠于“算不算新颖”“算不算确定”这些见仁见智的说法。
第三个方向是调控。 上面四种功能凑在一起运转时,总得有个角色来安排谁先谁后、各出几分力,这就是控制(C)。控制自己并不直接加工信息,它更像乐队里的指挥:不亲手碰任何一件乐器,却决定着每件乐器何时进入、声音多强、彼此怎么配合。注意力涣散的多动症患者就是个反例——感知、行动、记忆、生成样样不缺,偏偏这位“指挥”出了状况,于是各声部各吹各的,乱作一团。
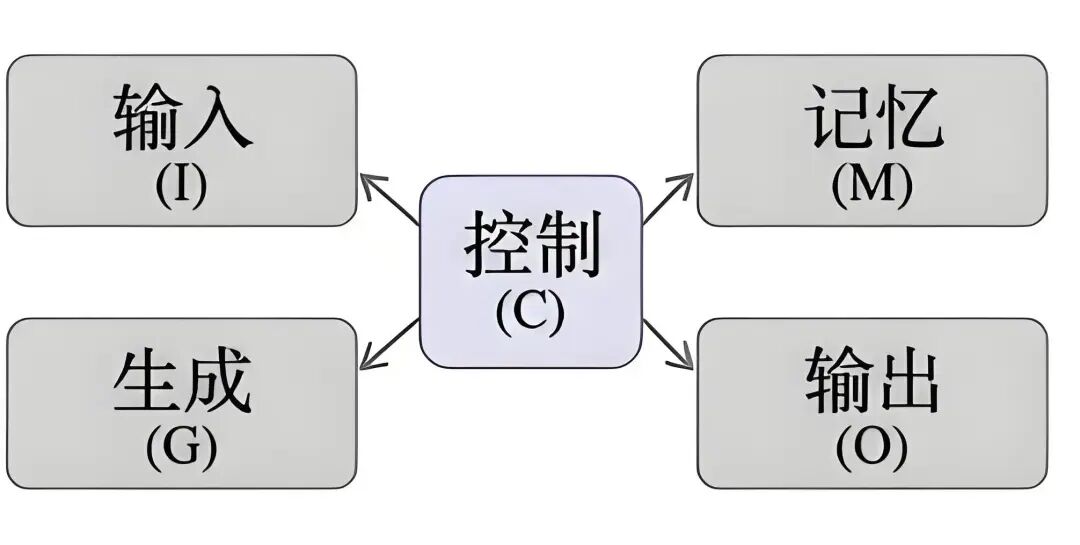
至此,一个智能体的最小完备功能架构就得到了:即任何一个智能体都是由信息的输入、输出、记忆、生成以及对上述四个进行控制等五个功能构成的信息处理系统。可以简洁地写作一个五元组 (C, G, M, O, I)——五个字母依次代表控制、生成、记忆、输出、输入。
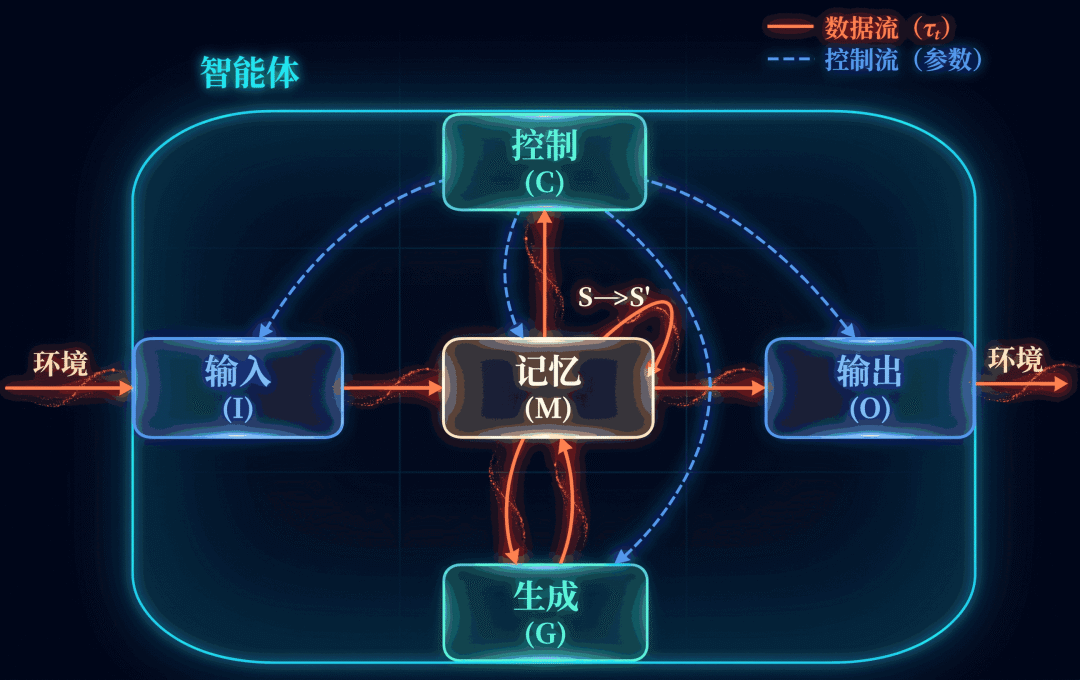
值得探讨的是:记忆在五个基础功能中处于非常中心和独特的位置。如果没有记忆,输入的信息无法保存,生成的新信息也无法存留,输出的信息没有来源,甚至负责对控制功能进行支持的调度指令也无处安身。由此可见,记忆对于智能体是最为关键和核心的智能特征之一。
三、以最小完备架构诠释智能与认知的核心概念
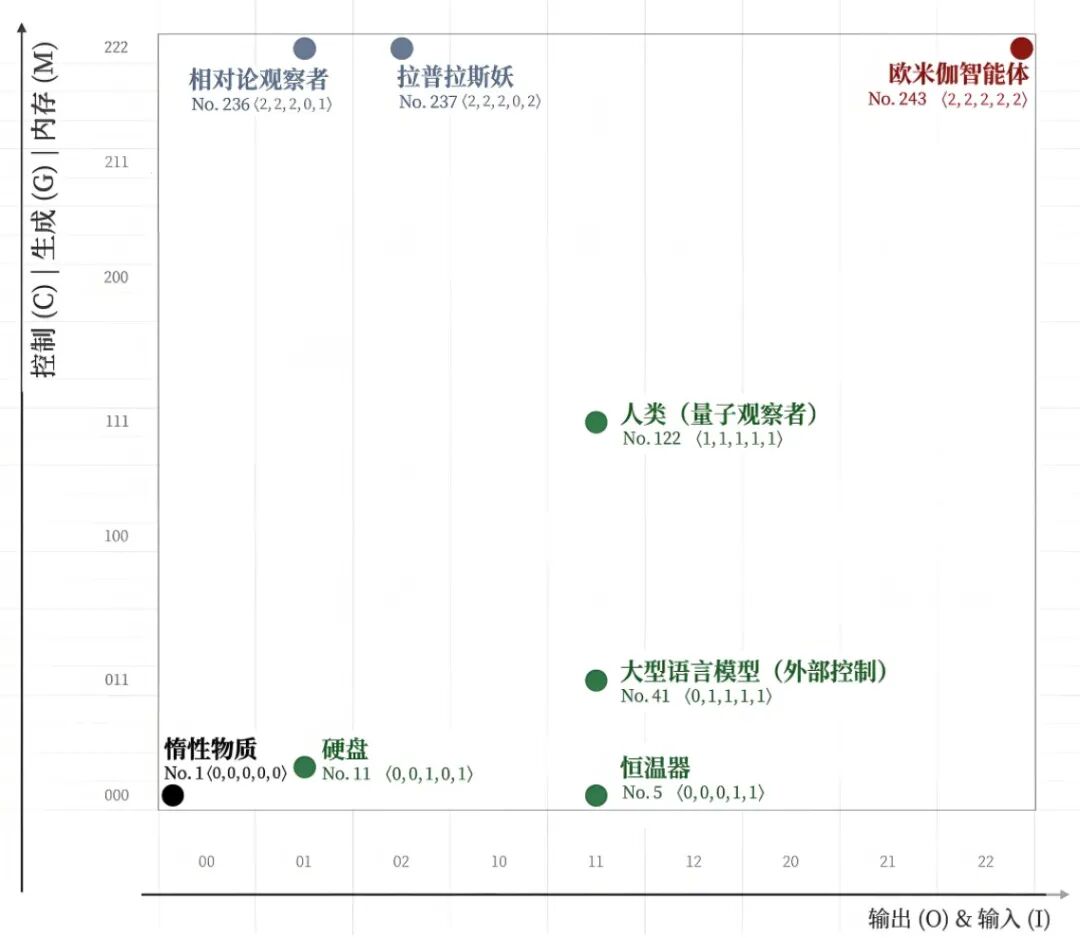
在最小完备架构之上,把每一项基础功能再细分为“无、有限、无限”三种状态,五个维度组合便给出 3⁵ = 243 种智能体类型。能力全为 0 的是阿尔法智能体,全趋于无穷的是欧米伽智能体,二者构成演化的两个极点,其余所有现实智能体都坐落其间。把这些类型有序排开,便是一张智能体能力周期表。
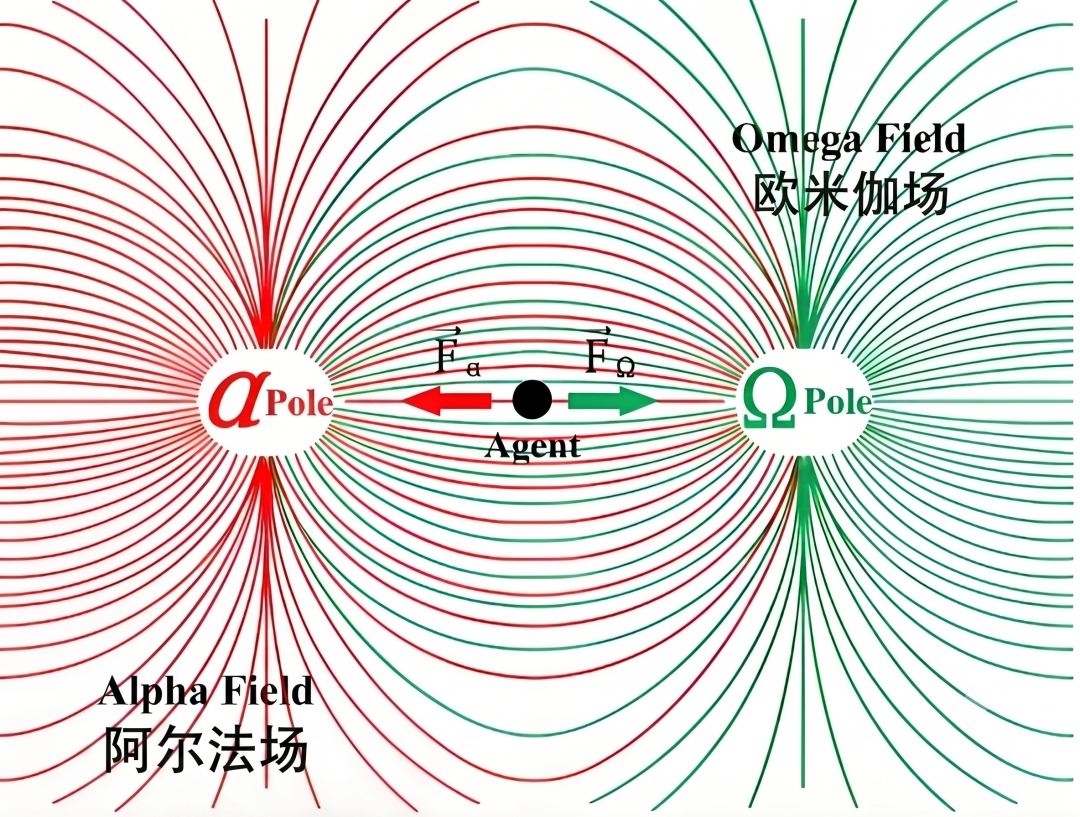
五个基础功能合起来,可以形成一个五维的能力向量空间。阿尔法智能体和欧米伽智能体这两个极点不仅是分类的边界,更标示出演化的方向,由此引出两种信息动力学意义上的“引力场”/“演化势能”:其中阿尔法引力(场)汇聚了资源耗散、信息遗忘与结构衰朽,牵引智能体趋向能力归零;而欧米伽引力(场)则汇聚了学习、适应与自组织,推动它趋向能力的无限。
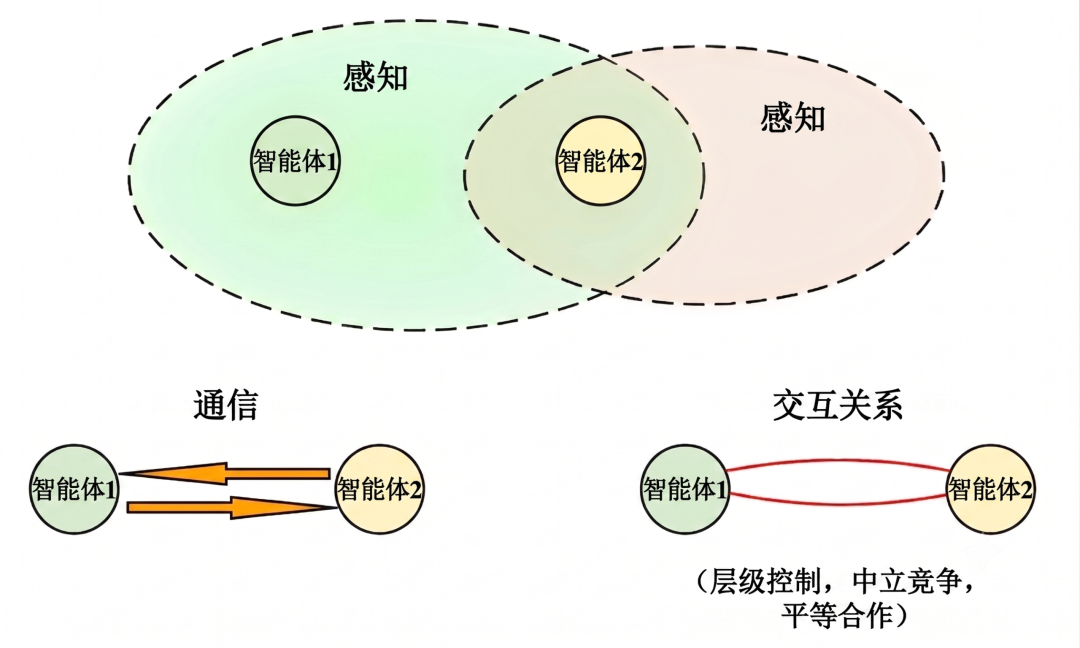
如果视野从单体扩展到群体后,再沿感知、通信、交互三个层层递进的维度刻画两两智能体的耦合关系:能否觉察对方、能否建立信息通道、彼此是中立、协作、对抗还是层级控制。三者叠加,构成一张多智能体关系图谱。
至此,最小完备架构、能力周期表、演化动力学与关系图谱,从结构、能力、动力到关系层层展开,可以构成以智能体为核心的广义智能体理论体系。
下面先用智能体的最小完备架构,从“智能”和“意识”这两个最核心、也最难定义的概念开始分析:
智能,在 GAT 框架里,被定义为智能体调动五个基础功能、在两种智能场的牵引下沿能力空间演化时所表现出的整体效能。
这里需要进一步指出,最小架构中的五个基础功能并不“平级”。输入、输出、记忆、生成负责直接处理信息,是打底的“基础智能”;而控制管的是“如何调度这四者”,站在它们之上,构成更高一层的“高阶智能”。也正是这一层调度,让五个功能的并置不再是简单相加,而成为一个会统筹、有章法的整体。
意识则被严格地界定为控制功能 C 本身及其运行过程,也就是对输入、输出、记忆、生成四个基础功能的调度与协同。
进而,根据控制指令的来源,意识可分为两类:指令源自智能体内部(可不受图灵可计算性约束)的,称为自我意识,人类与其他生物体属此类;指令源自智能体外部、并经图灵可计算机制派生的,称为人工意识,当今所有 AI 系统严格落入此类。
这样一来,长期被悬置在哲学层面的“AI 是否拥有意识”问题,就被翻译成了一个可对其功能架构进行考察的工程问题。
在界定智能与意识的定义之后,我们可以将这一理论框架往外延伸,看看智能科学与认知科学里那些散落各处的术语,能否同样被收进同一套坐标。下面是二十个核心概念的简译:
| 概念 |
以智能体最小完备架构为基础的诠释 |
| 感知 |
环境状态 → 内部瞬态表征(I) |
| 多模态 |
异构信号经多通道并行转导后,在内部完成统一表征(I + M) |
| 图像输入 |
光子信号经感光器件转换为像素矩阵表征(I 的一个特例) |
| 行动 |
内部状态 → 对环境的物理作用(O) |
| 检索 |
控制激活记忆,按线索定位并取出信息(C 作用于 M) |
| 遗忘 |
信息从记忆集合中主动删除或被动衰减(M 的逆向过程) |
| 记忆存储 |
瞬态信息固化为可持久访问的内部状态(M 的写入) |
| 计算 |
按确定规则对输入或记忆做变换,产出新信息(G,确定性子集) |
| 推理 |
在控制调度下,以规则对已有信息做逻辑演绎,生成新结论(C 调用 M 与 G) |
| 抽象 |
从多个具体表征中提取共性特征,构建更高层概念(C 主导下的 G+M) |
| 理解 |
当前输入与已有记忆建立稳定语义关联(I 与 M 的对齐) |
| 预测 |
基于当前输入与记忆,对未来状态生成估计(G 受 C 与 M 共同约束) |
| 规划 |
围绕给定目标生成有序动作序列(C 调度 G,落于 O) |
| 决策 |
生成候选方案集并按某种偏好选出最优解(G 提供候选,C 完成选择) |
| 学习 |
闭环反馈(I → M → C → O → I → G → M)持续更新记忆 |
| 注意力 |
动态分配各功能的运行强度与信息流优先级(C 的核心职能) |
| 反馈 |
输出经环境回返为输入(O → 环境 → I 的闭环) |
| 命令 |
一个智能体的控制信号跨边界进入另一智能体(C 的跨主体传递) |
| 对齐 |
不同智能体的异构内部表征投影到共享语义空间(M 与 G 的跨主体协调) |
| 确定目标 |
在控制层生成并锚定一个期望的终止状态(C 的元级行为) |
二十个本来散落于不同领域、不同语境的术语,在同一套架构里获得了初步的诠释。值得说一句的是,这种“翻译”并不是给术语贴标签,而是给出它的最小功能分解。
为了让这套翻译方式看起来更具体,不妨以“学习”为例,把它的内部机理逐步拆开。
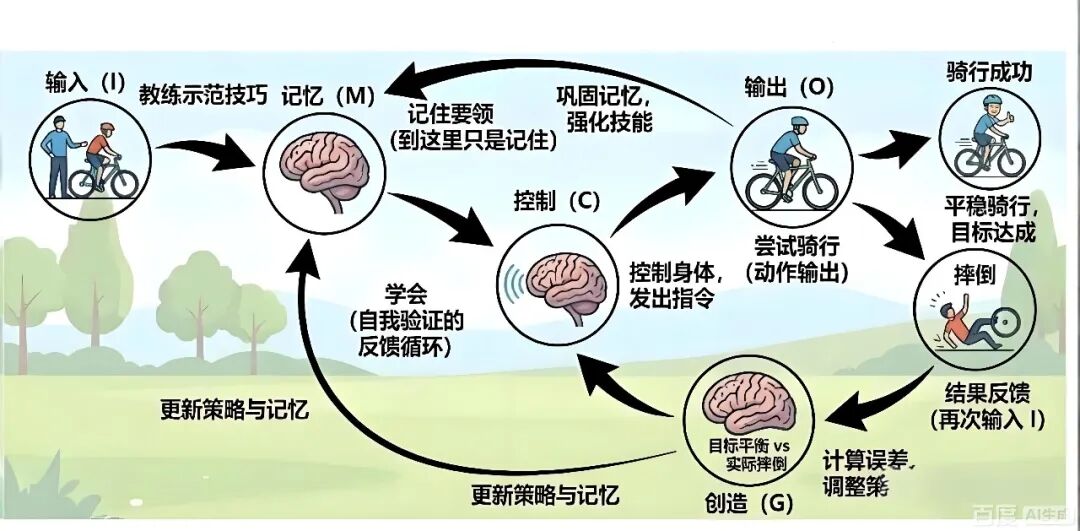
设想一个孩子学骑自行车。他先看父亲示范、感受车把的重量(输入 I),把动作要领记在脑里(记忆 M);上车后,大脑根据这些要领发出指令(控制 C),驱动手脚去蹬、去把(输出 O);车子歪斜、身体失衡的反作用,沿着皮肤与平衡器官传回(输入 I);系统把“实际感受到的失衡”和“本应保持的平衡”作差,产生出修正方案——比如“重心再往左一点”(生成 G);新方案被写回记忆并替换旧要领(M 的更新)。如此反复多轮,直到稳稳骑出去。
把这个过程抽出来,就是一条回路: I → M → C → O → I → G → M 。它看似是七步,实则不过是五个基础功能在控制的统一调度下,沿一条闭环各司其职走一遍。
任何“学习”,无论生物的、人的,还是 AI 的,本质上都是这条回路在不同载体上的实现:神经突触的可塑性是这条回路,反向传播也是这条回路,强化学习 里“环境—状态—动作—奖励”的四元组本质上仍然是这条回路。
四、写在最后
需要说明的是,以上对二十个核心概念的诠释只是一种初步的尝试。最小完备架构作为一个仍在演进中的探索性框架,其内部逻辑、概念边界乃至术语本身的取舍,都还存在进一步打磨的空间,某些诠释或许过于简化,某些概念可能尚未被完全收拢,也有可能存在我们眼下未能察觉的疏漏,这些问题我们也希望在未来通过不断深化研究予以解决。
说明:本文核心内容已作为论文《From Physical Observer to AI Agent: A First-Principles Derivation of the Minimal Complete Architecture》发表在2026第17届国际群体智能会议(ICSI’2026)。
更多关于智能体架构与认知模型的讨论,欢迎在 云栈社区 继续交流。
 发表于 2026-6-17 00:21:16
|
查看: 103|
回复: 0
发表于 2026-6-17 00:21:16
|
查看: 103|
回复: 0
