在上一篇文章中,我们探讨了QEMU如何加载并运行一个Guest虚拟系统。然而,在纯软件模拟(TCG)模式下,其性能通常只能达到宿主机硬件性能的10%左右,这显然不是QEMU的终极目标。本文将聚焦Linux平台,深入分析KVM和VirtIO两大技术如何协同工作,共同助力QEMU将虚拟化性能从10%提升至80%以上的水准。
本文的路径是:从什么是KVM,以及KVM如何优化指令和内存虚拟化处理,到什么是VirtIO及其虚拟化驱动框架,再到Linux环境下KVM、VirtIO和QEMU如何协同工作以提升性能,最后概览QEMU在其他宿主机环境下的优化手段,全面揭示QEMU实现性能飞跃的奥秘。
一、KVM:硬件辅助虚拟化的 “性能引擎”
1. 什么是 KVM?—— 内核态的虚拟化能力提供者
KVM 是 Linux 内核内置的硬件辅助虚拟化模块(自 Linux 2.6.20 版本集成),本质是一套内核态驱动(kvm.ko)+ 硬件虚拟化技术(如 Intel VT-x、AMD-V、ARM VMX)的组合。其核心定位是:将 Guest 系统的指令执行、内存访问、中断处理等核心操作,直接委托给宿主机硬件执行,从而避免 QEMU 纯软件模拟带来的巨大开销。
需要明确的关键认知点:
- • KVM 本身并非一个完整的虚拟化平台,而是 “虚拟化能力的内核级接口”,必须与 QEMU 配合使用,构成 QEMU-KVM 架构。
- • KVM 仅支持 “同架构虚拟化”(如 x86 主机模拟 x86 Guest、ARM 主机模拟 ARM Guest),这与车载场景中域控制器多采用 ARM 架构(如 Cortex-A53/A76)的现状高度契合。
- • 其核心价值在于:通过硬件辅助,将 Guest 指令执行效率从 “软件翻译级” 提升至 “原生硬件级”,同时大幅优化内存虚拟化的地址映射效率。作为Linux内核的关键模块,它奠定了高性能虚拟化的基石。
2. KVM 的核心优化:指令虚拟化加速
纯 QEMU(TCG模式)的性能瓶颈核心在于 “指令翻译开销”——TCG 需要将 Guest 指令动态翻译为 Host 指令,过程中存在大量冗余计算。KVM 通过硬件虚拟化技术,让 Guest 指令得以 “直接执行”,彻底突破了这一瓶颈:
(1)硬件虚拟化技术的核心逻辑
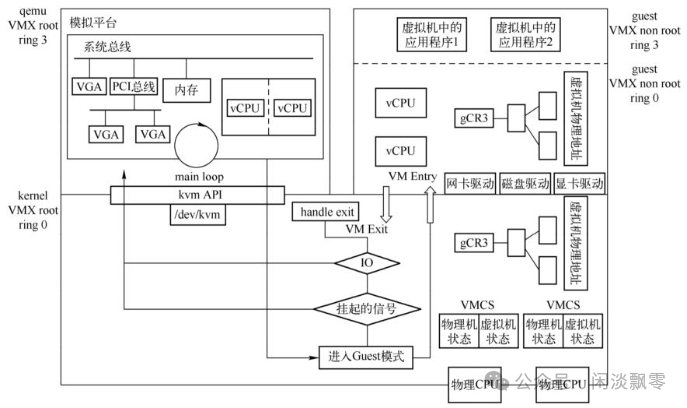
KVM 依赖宿主机 CPU 的硬件虚拟化扩展(如 Intel VT-x、ARM VMX),在 CPU 中新增了两种运行模式:
- • Root 模式:宿主机内核(KVM)和 QEMU 运行在该模式,拥有最高权限。
- • Non-Root 模式:Guest 系统(内核 + 应用)运行在该模式,权限被限制,但可直接执行绝大多数指令。
(2)指令执行流程优化(以 ARM 车载场景为例)
- QEMU 通过 KVM 提供的 ioctl 接口(如
KVM_CREATE_VM、KVM_CREATE_VCPU)创建虚拟机(VM)和虚拟 CPU(VCPU)。
- QEMU 将 Guest 系统的内核镜像、设备树加载到虚拟内存,并通过
KVM_RUN 指令启动 VCPU。
- Guest 指令在 Non-Root 模式下直接由 ARM CPU 执行,无需 TCG 翻译:
- • 普通指令(如算术运算、内存读写):直接执行,性能与原生一致。
- • 特权指令(如修改 CPU 状态、配置中断控制器):触发
VMEXIT(从 Non-Root 模式退出到 Root 模式),由 KVM 内核模块处理。
- KVM 处理完特权指令后,通过
VMENTRY 重新进入 Non-Root 模式,Guest 继续执行。
(3)VMEXIT 优化:减少模式切换开销
VMEXIT 是指令虚拟化的核心开销来源(一次模式切换耗时可达百纳秒级),KVM 通过以下手段进行优化:
- • 特权指令拦截精简:仅对必要的特权指令(如配置 MMU、触发中断)触发 VMEXIT,普通特权指令(如读取 CPU 型号)直接在 Non-Root 模式模拟。
- • 批量处理:将多次连续的 VMEXIT 合并为一次处理(例如当 Guest 频繁配置寄存器时)。
- • 硬件辅助拦截:利用 CPU 的虚拟化扩展(如 ARM 的 EL2 异常级),直接在硬件层面拦截特权指令,减少软件干预。
3. Demo:一个最小化的KVM虚拟机管理器
/dev/kvm 是 Linux 内核为 KVM 模块提供的字符设备接口。QEMU 通过一系列 ioctl() 系统调用与该设备交互,从而将原本需要软件模拟执行的 Guest 代码,转换为由 CPU 硬件直接执行。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <linux/kvm.h>
#define MEM_SIZE 0x100000 // 1MB内存(Guest物理内存)
#define CODE_START 0x1000 // Guest代码起始地址
// 精简的16位实模式代码:打印"A",然后挂起
unsigned char guest_code[] = {
0xb8, 0x41, 0x00, // mov ax, 0x41 ; 'A'的ASCII码
0xb4, 0x0e, // mov ah, 0x0e ; BIOS teletype功能
0xcd, 0x10, // int 0x10 ; 调用BIOS显示服务
0xf4, // hlt ; 停机
0xeb, 0xfe // jmp $ ; 无限循环
};
int main() {
int kvm_fd, vm_fd, vcpu_fd, ret;
struct kvm_userspace_memory_region mem_region;
void *guest_memory;
printf("=== KVM最小化虚拟机Demo ===\n");
// 1. 打开/dev/kvm设备
kvm_fd = open("/dev/kvm", O_RDWR);
if (kvm_fd < 0) {
perror("打开/dev/kvm失败");
exit(1);
}
printf("✓ 打开/dev/kvm成功\n");
// 2. 创建虚拟机实例
vm_fd = ioctl(kvm_fd, KVM_CREATE_VM, 0);
if (vm_fd < 0) {
perror("创建虚拟机失败");
exit(1);
}
printf("✓ 创建虚拟机实例\n");
// 3. 为Guest分配内存(通过mmap映射)
guest_memory = mmap(NULL, MEM_SIZE,
PROT_READ | PROT_WRITE,
MAP_PRIVATE | MAP_ANONYMOUS | MAP_NORESERVE,
-1, 0);
if (guest_memory == MAP_FAILED) {
perror("分配Guest内存失败");
exit(1);
}
// 将Guest代码复制到Guest内存的0x1000位置
memcpy(guest_memory + CODE_START, guest_code, sizeof(guest_code));
// 4. 设置Guest内存区域
memset(&mem_region, 0, sizeof(mem_region));
mem_region.slot = 0; // 内存插槽编号
mem_region.guest_phys_addr = 0; // Guest物理起始地址
mem_region.memory_size = MEM_SIZE; // 内存大小
mem_region.userspace_addr = (unsigned long)guest_memory; // 主机用户空间地址
ret = ioctl(vm_fd, KVM_SET_USER_MEMORY_REGION, &mem_region);
if (ret < 0) {
perror("设置内存区域失败");
exit(1);
}
printf("✓ 设置Guest内存区域 (1MB)\n");
// 5. 创建虚拟CPU (vCPU)
vcpu_fd = ioctl(vm_fd, KVM_CREATE_VCPU, 0);
if (vcpu_fd < 0) {
perror("创建vCPU失败");
exit(1);
}
printf("✓ 创建虚拟CPU\n");
// 6. 获取vCPU的kvm_run结构大小并映射
int run_size = ioctl(kvm_fd, KVM_GET_VCPU_MMAP_SIZE, 0);
struct kvm_run *run = mmap(NULL, run_size,
PROT_READ | PROT_WRITE,
MAP_SHARED, vcpu_fd, 0);
if (run == MAP_FAILED) {
perror("映射kvm_run失败");
exit(1);
}
// 7. 设置vCPU的寄存器状态(16位实模式)
struct kvm_regs regs;
struct kvm_sregs sregs;
// 获取初始寄存器状态
ret = ioctl(vcpu_fd, KVM_GET_SREGS, &sregs);
if (ret < 0) {
perror("获取特殊寄存器失败");
exit(1);
}
// 设置段寄存器(实模式)
sregs.cs.selector = 0x0;
sregs.cs.base = 0x0;
sregs.ds.selector = 0x0;
sregs.ds.base = 0x0;
sregs.es.selector = 0x0;
sregs.es.base = 0x0;
sregs.fs.selector = 0x0;
sregs.fs.base = 0x0;
sregs.gs.selector = 0x0;
sregs.gs.base = 0x0;
sregs.ss.selector = 0x0;
sregs.ss.base = 0x0;
// 设置代码段为16位实模式
sregs.cs.base = 0;
sregs.cs.limit = 0xffff;
sregs.cs.selector = 0;
ret = ioctl(vcpu_fd, KVM_SET_SREGS, &sregs);
if (ret < 0) {
perror("设置特殊寄存器失败");
exit(1);
}
// 设置通用寄存器
memset(®s, 0, sizeof(regs));
regs.rip = CODE_START; // 指令指针指向Guest代码
regs.rflags = 0x2; // 设置标志寄存器(位1为1,其他为0)
ret = ioctl(vcpu_fd, KVM_SET_REGS, ®s);
if (ret < 0) {
perror("设置通用寄存器失败");
exit(1);
}
printf("✓ 设置vCPU寄存器状态 (实模式,RIP=0x%x)\n", CODE_START);
// 8. 运行虚拟机!
printf("--- 开始执行Guest代码 ---\n");
int run_ret;
while (1) {
// 切换到Guest执行
run_ret = ioctl(vcpu_fd, KVM_RUN, 0);
if (run_ret < 0) {
perror("KVM_RUN失败");
break;
}
// 检查退出原因
switch (run->exit_reason) {
case KVM_EXIT_HLT:
printf("✓ Guest执行了HLT指令,虚拟机正常停机\n");
goto exit_loop;
case KVM_EXIT_IO:
if (run->io.direction == KVM_EXIT_IO_OUT) {
// 处理Guest的IO输出(我们简单的打印字符)
char *data = ((char *)run) + run->io.data_offset;
printf("Guest输出: %c\n", data[0]);
}
break;
case KVM_EXIT_SHUTDOWN:
printf("虚拟机接收到关机信号\n");
goto exit_loop;
default:
printf("未知退出原因: %d\n", run->exit_reason);
goto exit_loop;
}
}
exit_loop:
printf("--- Guest执行结束 ---\n");
// 9. 清理资源
munmap(run, run_size);
munmap(guest_memory, MEM_SIZE);
close(vcpu_fd);
close(vm_fd);
close(kvm_fd);
return 0;
}
(1)关键步骤与QEMU实际实现的对应关系
| Demo中的步骤 |
QEMU中的对应实现 |
说明 |
open("/dev/kvm") |
kvm_init()函数 |
QEMU初始化KVM子系统 |
KVM_CREATE_VM |
kvm_create_vm() |
创建虚拟机上下文,每个QEMU进程对应一个VM |
mmap()分配内存 |
memory_region_init_*()系列函数 |
QEMU的内存管理更复杂,支持多种内存区域 |
KVM_SET_USER_MEMORY_REGION |
kvm_set_user_memory_region() |
注册Guest物理内存到KVM |
KVM_CREATE_VCPU |
kvm_init_vcpu() |
为每个虚拟CPU创建vCPU线程 |
KVM_GET_VCPU_MMAP_SIZE |
kvm_get_vcpu_mmap_size() |
获取共享的kvm_run结构大小 |
KVM_SET_SREGS/REGS |
kvm_arch_put_regs() |
设置初始寄存器状态(包括BIOS启动) |
KVM_RUN循环 |
kvm_cpu_exec()中的主循环 |
QEMU的vCPU线程在此循环中调度Guest执行 |
(2)真实QEMU与Demo的差异
- 复杂的内存管理:真实QEMU使用多级
MemoryRegion和AddressSpace来模拟复杂的内存拓扑。
- 设备模拟:QEMU为每个虚拟设备(磁盘、网卡等)注册IO监听器,处理Guest的MMIO/PIO访问。
- 多vCPU与中断:支持SMP、APIC、中断控制器等。
- 迁移与快照:完整的虚拟机状态保存/恢复机制。
- VirtIO集成:通过virtqueue实现高效的前后端通信。
这个Demo虽然简单,但完整展示了QEMU通过/dev/kvm接口将Guest代码从软件模拟转为硬件直接执行的核心路径。
4. KVM 的核心优化:内存虚拟化加速
纯 QEMU 的内存访问需要经过 “Guest 虚拟地址→QEMU 模拟 MMU→Host 物理地址” 的多级翻译,开销巨大。KVM 通过硬件辅助内存虚拟化技术,优化了地址映射流程:
(1)传统内存虚拟化的痛点
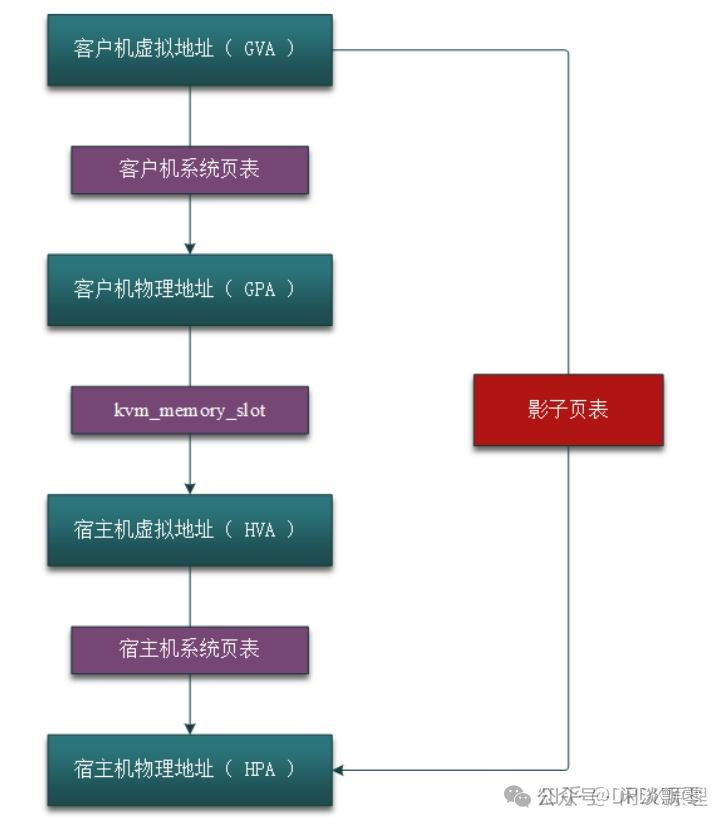
在虚拟化环境中,内存寻址需要两次转换:首先将 Guest 的虚拟地址(GVA)转换成 Guest 的物理地址(GPA),然后将 GPA 转换成 Host 的物理地址(HPA)。
- • 软件实现的虚拟机内存寻址——影子页表:早期CPU不支持EPT时的方案,效率低下。
- • 硬件实现的虚拟机内存寻址——扩展页表(EPT):整个过程全部由硬件完成,效率极高。
(2)KVM 的优化方案:EPT/NPT 技术
KVM 利用 CPU 的硬件辅助内存虚拟化技术(Intel EPT、AMD NPT、ARM Stage-2 MMU),将 “双重页表” 合并为 “单次硬件翻译”。下图是 EPT 的基本原理图示,EPT 在原有CR3页表地址映射的基础上,引入了 EPT 页表来实现另一层映射,这样,GVA->GPA->HPA 的两次地址转换都由硬件来完成。
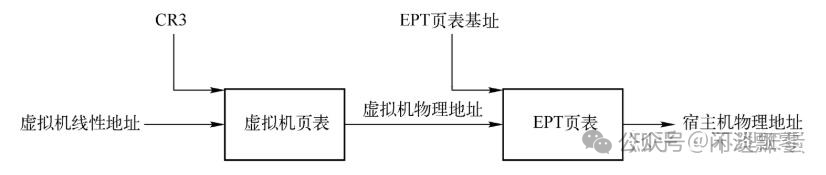
这里举一个小例子来说明整个地址转换的过程。假设现在 Guest 中某个进程需要访问内存,CPU 首先会访问 Guest 中的 CR3 页表来完成 GVA 到 GPA 的转换。如果 GPA 不为空,则 CPU 接着通过 EPT 页表来实现 GPA 到 HPA 的转换(实际上,CPU 会首先查看硬件 EPT TLB 或者缓存,如果没有对应的转换,才会进一步查看 EPT 页表)。如果 HPA 为空,则 CPU 会抛出 EPT Violation 异常由 VMM 来处理。
二、VirtIO:设备 I/O 虚拟化的 “性能桥梁”
1. 传统设备模拟的性能瓶颈
QEMU 纯软件模拟外设(如网卡、磁盘、CAN 控制器)时,存在两大性能问题:
- • VMEXIT 频繁:Guest 驱动的每一次寄存器读写、中断请求都会触发 VMEXIT,交给 QEMU 处理(例如发送一个网络包可能触发数十次 VMEXIT)。
- • 数据拷贝冗余:Guest 数据需要经过 “Guest 内存→QEMU 缓冲区→Host 设备缓冲区” 的多次拷贝(如 CAN 帧发送需 2-3 次拷贝),延迟高、吞吐量低。
这些问题导致纯 QEMU 的设备 I/O 性能仅为原生的 5%-20%,无法满足车载以太网、激光雷达等高速设备的传输需求。而 VirtIO 的核心思想是“半虚拟化”—— 通过 Guest 驱动与 QEMU 的协同设计,跳过冗余的硬件模拟步骤,直接高效交互。
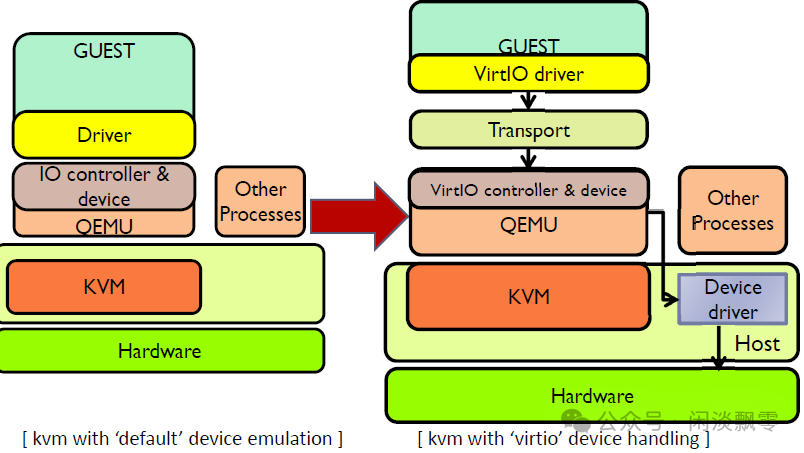
2. 什么是 VirtIO?—— 标准化的半虚拟化驱动框架
VirtIO 是一套跨平台、标准化的半虚拟化设备接口规范(由 Linux 基金会维护),其核心是:
- • Guest 侧安装 “VirtIO 前端驱动”(如
virtio-net 网卡驱动、virtio-blk 块设备驱动),明确知道自己运行在虚拟化环境中。
- • QEMU 侧实现 “VirtIO 后端驱动”,直接与 Host 的硬件或内核子系统交互。
- • 前后端通过标准化的 “VirtQueue”(虚拟队列)传递数据,避免寄存器模拟和多次数据拷贝。
关键优势:
- • 标准化:支持多种 Guest 系统(Linux、QNX、AUTOSAR)和 Host 平台,车载场景中可无缝适配不同 ECU 的操作系统。
- • 低开销:VMEXIT 次数减少 90% 以上,数据拷贝从 3 次减少到 1 次(甚至零拷贝)。
- • 可扩展:支持网卡、块设备、串口、CAN 控制器等车载常用设备,且可自定义 VirtIO 设备(如车载激光雷达专用 VirtIO 设备)。这套标准化的虚拟化框架是现代云原生和基础设施的关键组件。
3. VirtIO 的核心架构:前端驱动→VirtQueue→后端驱动
VirtIO 的性能优势源于其精简的交互架构,核心组件包括:
(1)VirtIO 前端驱动(Guest 侧)
- • 运行在 Guest 内核中(如 Linux 内核的
drivers/net/virtio_net.c),对外提供标准的设备接口(如网卡的 struct net_device、块设备的 struct gendisk),让 Guest 应用无需修改即可使用。
- • 对内通过 “VirtIO 协议” 与后端通信,将设备请求(如发送网络包、读写磁盘)封装为 “描述符链”,放入 VirtQueue。
- • 支持中断合并、批量请求等优化,减少 VMEXIT 次数。
(2)VirtQueue(虚拟队列)
VirtIO 的核心数据结构,本质是一个环形缓冲区,用于前后端高效传递数据和请求,特点:
- • 共享内存:VirtQueue 所在的内存区域同时映射到 Guest 和 Host 的地址空间,前后端可直接访问,无需数据拷贝。
- • 描述符链:每个请求由多个描述符(
struct virtio_desc)组成,支持分散 - 聚集(scatter-gather)I/O,可直接处理 Guest 内存中的分散数据(如车载传感器的多段数据)。
- • 无锁设计:通过索引指针(
avail_idx、used_idx)实现前后端无锁访问,避免同步开销。
(3)VirtIO 后端驱动(QEMU 侧)
- • 运行在 QEMU 用户态(如
hw/net/virtio-net.c),监听 VirtQueue 中的请求。
- • 收到请求后,直接与 Host 的硬件或内核子系统交互(如通过
tap 设备发送网络包、通过 blkdev 读写磁盘)。
- • 处理完成后,将结果写入 VirtQueue 的 “已用区域”,并通过 KVM 触发 Guest 中断,通知 Guest 请求完成。
4. Demo:VirtIO-CAN虚拟总线实现
针对车载场景的 CAN 总线虚拟化需求,VirtIO 扩展了 virtio-can 设备类型,核心实现:
- • 前端驱动:Linux 内核的
drivers/net/can/virtio_can.c,提供标准的 CAN 总线接口(如 can_send、can_recv)。
- • 后端驱动:QEMU 的
hw/net/virtio-can.c,可对接 Host 的真实 CAN 卡(如 SocketCAN)或其他模拟 CAN 设备。
- • 优势:支持 CAN 2.0、CAN FD,传输延迟低至 10μs 级,满足车载实时通信需求。
Guest OS (虚拟机) QEMU (宿主机) 外部系统
┌──────────────┐ ┌─────────────┐ ┌────────────┐
│ virtio-can │ │ VirtIO-CAN │ │ SocketCAN │
│ 驱动 │◄─────────►│ 后端 │◄────────►│ vcan0 │
│ (前端) │ virtio │ (QEMU) │ socket │ 或真实CAN │
└──────────────┘ queue └─────────────┘ 接口 └────────────┘
(1)VirtIO-CAN数据结构定义
// virtio_can_demo.h - VirtIO-CAN协议定义
#ifndef VIRTIO_CAN_DEMO_H
#define VIRTIO_CAN_DEMO_H
#include <stdint.h>
#include <linux/can.h>
// VirtIO-CAN设备ID
#define VIRTIO_ID_CAN 28
// CAN队列类型
#define VIRTIO_CAN_QUEUE_TX 0 // 发送队列
#define VIRTIO_CAN_QUEUE_RX 1 // 接收队列
// CAN帧标志位
#define VIRTIO_CAN_F_RTR 0x01 // 远程传输请求
#define VIRTIO_CAN_F_ERR 0x02 // 错误帧
#define VIRTIO_CAN_F_EFD 0x04 // 扩展帧标识符
// VirtIO-CAN配置空间结构
struct virtio_can_config {
uint32_t bitrate; // 比特率 (kbps)
uint32_t bitrate_max; // 最大比特率
uint32_t bitrate_min; // 最小比特率
uint16_t max_filters; // 最大过滤器数量
uint8_t can_fd; // 支持CAN-FD
uint8_t reserved[5]; // 保留字段
};
// VirtIO-CAN帧结构(与Linux SocketCAN兼容)
struct virtio_can_frame {
uint32_t can_id; // CAN标识符 (标准/扩展)
uint8_t can_dlc; // 数据长度码
uint8_t flags; // 帧标志
uint8_t data[8]; // CAN数据
uint64_t timestamp; // 时间戳(纳秒)
};
// CAN过滤器结构
struct virtio_can_filter {
uint32_t can_id; // 过滤器标识符
uint32_t can_mask; // 过滤器掩码
};
#endif
(2)简化的VirtIO-CAN后端实现
// virtio_can_backend.c - QEMU中的VirtIO-CAN后端模拟
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <pthread.h>
#include <sys/socket.h>
#include <sys/ioctl.h>
#include <net/if.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include "virtio_can_demo.h"
// VirtIO队列结构(简化版)
struct virtio_queue {
int size;
int free_desc;
void **desc_buffers;
};
// VirtIO-CAN设备状态
struct virtio_can_device {
// VirtIO相关
struct virtio_can_config config;
struct virtio_queue tx_queue;
struct virtio_queue rx_queue;
// SocketCAN连接
int can_socket;
char can_iface[16];
// 线程控制
pthread_t rx_thread;
int running;
// 统计信息
uint64_t tx_frames;
uint64_t rx_frames;
uint64_t error_count;
};
// 创建CAN Socket连接
int create_can_socket(const char *ifname) {
int s;
struct sockaddr_can addr;
struct ifreq ifr;
printf("[QEMU] Creating CAN socket for interface: %s\n", ifname);
// 创建CAN原始套接字
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("socket");
return -1;
}
// 绑定到指定CAN接口
strcpy(ifr.ifr_name, ifname);
if (ioctl(s, SIOCGIFINDEX, &ifr) < 0) {
perror("ioctl");
close(s);
return -1;
}
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("bind");
close(s);
return -1;
}
printf("[QEMU] CAN socket created successfully\n");
return s;
}
// 接收线程函数:从真实CAN总线接收数据并放入VirtIO队列
void *can_receive_thread(void *arg) {
struct virtio_can_device *dev = (struct virtio_can_device *)arg;
struct can_frame frame;
int nbytes;
printf("[QEMU] CAN receive thread started\n");
while (dev->running) {
// 从SocketCAN读取CAN帧
nbytes = read(dev->can_socket, &frame, sizeof(struct can_frame));
if (nbytes < 0) {
usleep(1000); // 等待1ms避免忙等待
continue;
}
if (nbytes == sizeof(struct can_frame)) {
// 转换为VirtIO-CAN帧格式
struct virtio_can_frame vframe = {
.can_id = frame.can_id,
.can_dlc = frame.can_dlc,
.timestamp = 0 // 实际实现中应获取时间戳
};
memcpy(vframe.data, frame.data, frame.can_dlc);
// 查找可用的描述符
int desc_idx = -1;
for (int i = 0; i < dev->rx_queue.size; i++) {
if (dev->rx_queue.desc_buffers[i] != NULL) {
desc_idx = i;
break;
}
}
if (desc_idx >= 0) {
// 将帧数据复制到描述符缓冲区
memcpy(dev->rx_queue.desc_buffers[desc_idx],
&vframe, sizeof(struct virtio_can_frame));
dev->rx_queue.desc_buffers[desc_idx] = NULL;
dev->rx_queue.free_desc--;
// 发送中断通知Guest(模拟)
printf("[QEMU] Received CAN frame -> Guest (ID: 0x%X, DLC: %d)\n",
frame.can_id, frame.can_dlc);
dev->rx_frames++;
} else {
printf("[QEMU] Warning: RX queue full, dropping frame\n");
dev->error_count++;
}
}
}
printf("[QEMU] CAN receive thread stopped\n");
return NULL;
}
// 处理Guest发送的CAN帧
void process_tx_frame(struct virtio_can_device *dev,
struct virtio_can_frame *frame) {
struct can_frame raw_frame;
// 转换格式
raw_frame.can_id = frame->can_id;
raw_frame.can_dlc = frame->can_dlc;
memcpy(raw_frame.data, frame->data, frame->can_dlc);
// 发送到真实CAN总线
if (write(dev->can_socket, &raw_frame, sizeof(struct can_frame)) > 0) {
printf("[QEMU] Transmitted CAN frame <- Guest (ID: 0x%X, DLC: %d)\n",
raw_frame.can_id, raw_frame.can_dlc);
dev->tx_frames++;
} else {
printf("[QEMU] Error transmitting frame\n");
dev->error_count++;
}
}
// 模拟VirtIO设备配置
void configure_virtio_can(struct virtio_can_device *dev) {
// 设置默认配置
dev->config.bitrate = 500; // 500 kbps
dev->config.bitrate_max = 1000; // 1 Mbps
dev->config.bitrate_min = 10; // 10 kbps
dev->config.max_filters = 1024;
dev->config.can_fd = 0; // 默认不支持CAN-FD
printf("[QEMU] VirtIO-CAN configured: bitrate=%d kbps\n",
dev->config.bitrate);
}
// 初始化VirtIO队列
void init_virtio_queues(struct virtio_can_device *dev) {
// 初始化发送队列
dev->tx_queue.size = 64;
dev->tx_queue.free_desc = dev->tx_queue.size;
dev->tx_queue.desc_buffers = malloc(dev->tx_queue.size * sizeof(void *));
// 初始化接收队列
dev->rx_queue.size = 64;
dev->rx_queue.free_desc = dev->rx_queue.size;
dev->rx_queue.desc_buffers = malloc(dev->rx_queue.size * sizeof(void *));
printf("[QEMU] VirtIO queues initialized: TX=%d, RX=%d descriptors\n",
dev->tx_queue.size, dev->rx_queue.size);
}
// 启动VirtIO-CAN设备
void start_virtio_can_device(const char *can_iface) {
struct virtio_can_device dev = {0};
printf("=== Starting VirtIO-CAN Device Demo ===\n");
// 1. 配置VirtIO设备
configure_virtio_can(&dev);
strcpy(dev.can_iface, can_iface);
// 2. 初始化VirtIO队列
init_virtio_queues(&dev);
// 3. 连接真实CAN总线
dev.can_socket = create_can_socket(can_iface);
if (dev.can_socket < 0) {
fprintf(stderr, "Failed to create CAN socket\n");
return;
}
// 4. 启动接收线程
dev.running = 1;
if (pthread_create(&dev.rx_thread, NULL, can_receive_thread, &dev) != 0) {
fprintf(stderr, "Failed to create receive thread\n");
close(dev.can_socket);
return;
}
// 5. 主循环:模拟设备运行
printf("[QEMU] VirtIO-CAN device ready. Press Ctrl+C to stop.\n");
printf("[QEMU] Statistics: TX=%lu, RX=%lu, Errors=%lu\n",
dev.tx_frames, dev.rx_frames, dev.error_count);
// 模拟一些传输事件
sleep(2);
// 6. 清理
dev.running = 0;
pthread_join(dev.rx_thread, NULL);
close(dev.can_socket);
printf("[QEMU] VirtIO-CAN device stopped\n");
printf("[QEMU] Final statistics: TX=%lu, RX=%lu, Errors=%lu\n",
dev.tx_frames, dev.rx_frames, dev.error_count);
}
int main(int argc, char *argv[]) {
const char *can_iface = "vcan0";
if (argc > 1) {
can_iface = argv[1];
}
start_virtio_can_device(can_iface);
return 0;
}
(3)前端驱动模拟(Guest侧)
// virtio_can_frontend.c - Guest中的VirtIO-CAN前端驱动模拟
#include <stdio.h>
#include <string.h>
#include "virtio_can_demo.h"
// 模拟Guest内存中的VirtIO队列
struct guest_virtqueue {
struct virtio_can_frame *buffer;
int capacity;
int head;
int tail;
};
// 初始化前端驱动
void virtio_can_driver_init(void) {
printf("[Guest] VirtIO-CAN driver initializing...\n");
printf("[Guest] Reading device configuration...\n");
printf("[Guest] Setting up virtqueues (TX/RX)...\n");
printf("[Guest] Driver ready\n");
}
// 发送CAN帧
int virtio_can_send_frame(struct guest_virtqueue *tx_queue,
struct virtio_can_frame *frame) {
if (tx_queue->tail >= tx_queue->capacity) {
return -1; // 队列满
}
// 将帧复制到发送缓冲区
memcpy(&tx_queue->buffer[tx_queue->tail], frame,
sizeof(struct virtio_can_frame));
tx_queue->tail++;
// 通知设备(后端)有数据要发送
printf("[Guest] CAN frame queued for transmission (ID: 0x%X)\n",
frame->can_id);
return 0;
}
// 接收CAN帧
int virtio_can_receive_frame(struct guest_virtqueue *rx_queue,
struct virtio_can_frame *frame) {
if (rx_queue->head >= rx_queue->tail) {
return -1; // 队列空
}
// 从接收缓冲区读取帧
memcpy(frame, &rx_queue->buffer[rx_queue->head],
sizeof(struct virtio_can_frame));
rx_queue->head++;
printf("[Guest] CAN frame received (ID: 0x%X, DLC: %d)\n",
frame->can_id, frame->can_dlc);
return 0;
}
// 演示前端驱动的使用
void demo_frontend_driver(void) {
struct guest_virtqueue tx_queue, rx_queue;
struct virtio_can_frame tx_frame, rx_frame;
printf("\n=== Guest VirtIO-CAN Driver Demo ===\n");
// 初始化驱动
virtio_can_driver_init();
// 模拟发送几个CAN帧
printf("\n[Guest] Sending CAN frames:\n");
// 帧1:标准数据帧
tx_frame.can_id = 0x123;
tx_frame.can_dlc = 8;
memcpy(tx_frame.data, "HelloCAN", 8);
tx_frame.flags = 0;
virtio_can_send_frame(&tx_queue, &tx_frame);
// 帧2:扩展帧
tx_frame.can_id = 0x1FFFFFFF | (1 << 31); // 扩展帧标志
tx_frame.can_dlc = 4;
memcpy(tx_frame.data, "Test", 4);
tx_frame.flags = VIRTIO_CAN_F_EFD;
virtio_can_send_frame(&tx_queue, &tx_frame);
// 帧3:远程帧
tx_frame.can_id = 0x456;
tx_frame.can_dlc = 0;
tx_frame.flags = VIRTIO_CAN_F_RTR;
virtio_can_send_frame(&tx_queue, &tx_frame);
// 模拟接收CAN帧
printf("\n[Guest] Receiving CAN frames:\n");
for (int i = 0; i < 3; i++) {
if (virtio_can_receive_frame(&rx_queue, &rx_frame) == 0) {
printf(" Frame %d: ID=0x%08X, Data=", i+1, rx_frame.can_id);
for (int j = 0; j < rx_frame.can_dlc; j++) {
printf("%02X ", rx_frame.data[j]);
}
printf("\n");
}
}
}
(4)QEMU中VirtIO-CAN的实现架构
// 实际QEMU源码中的关键结构(简化)
// hw/net/virtio-can.c
typedef struct VirtIOCAN {
VirtIODevice parent_obj; // 继承VirtIO设备
VirtQueue *vq[2]; // TX和RX队列
// 后端连接
SocketCANState *can_backend; // SocketCAN后端
QEMUTimer *tx_timer; // 发送定时器
// 配置
struct virtio_can_config config; // 设备配置
uint32_t host_features; // 主机支持特性
uint32_t guest_features; // Guest协商特性
// 状态
uint32_t status; // 设备状态
bool peer_closed; // 对端关闭
} VirtIOCAN;
// QEMU类型系统注册
static const TypeInfo virtio_can_info = {
.name = TYPE_VIRTIO_CAN,
.parent = TYPE_VIRTIO_DEVICE,
.instance_size = sizeof(VirtIOCAN),
.class_init = virtio_can_class_init,
};
// 设备初始化
static void virtio_can_device_realize(DeviceState *dev, Error **errp) {
VirtIOCAN *vc = VIRTIO_CAN(dev);
VirtIODevice *vdev = VIRTIO_DEVICE(dev);
// 初始化VirtIO设备
virtio_init(vdev, "virtio-can", VIRTIO_ID_CAN,
sizeof(struct virtio_can_config));
// 创建virtqueue
vc->vq[VIRTIO_CAN_QUEUE_TX] = virtio_add_queue(vdev, 64,
virtio_can_handle_tx);
vc->vq[VIRTIO_CAN_QUEUE_RX] = virtio_add_queue(vdev, 64,
virtio_can_handle_rx);
// 连接SocketCAN后端
vc->can_backend = socket_can_create("vcan0");
// 设置设备特性
virtio_can_set_features(vdev, vc->host_features);
}
三、Linux 环境下 QEMU-KVM-VirtIO 协同工作流程
KVM 解决了 “指令执行” 和 “内存访问” 的性能瓶颈,VirtIO 解决了 “设备 I/O” 的性能瓶颈,三者协同形成了完整的高性能虚拟化方案。以下以 “车载 ARM 域控制器中,Guest 系统通过 VirtIO-CAN 发送 CAN 帧” 为例,拆解全流程协同逻辑:
1. 协同前提:初始化配置
- • QEMU 启动时,通过
-enable-kvm 参数加载 KVM 模块,创建 VM 和 VCPU。
- • QEMU 通过
-device virtio-can-pci,netdev=can0 配置 VirtIO-CAN 设备,初始化 VirtQueue(共享内存区域),并将 VirtQueue 映射到 Guest 和 Host 地址空间。
- • KVM 为 VM 配置 Stage-2 页表,将 Guest 的虚拟内存(包括 VirtQueue 地址)映射到 Host 物理内存。
- • Guest 系统启动后,加载
virtio_can 前端驱动,识别 VirtIO-CAN 设备,初始化 CAN 总线参数(如波特率 500kbps)。
2. 核心协同流程:CAN 帧发送全链路
(1)Guest 应用发起 CAN 帧发送
Guest 中的车载控制应用调用 CAN 驱动接口(如 can_send(fd, &frame, sizeof(frame))),请求发送 CAN 帧(ID=0x123,数据 = 0x010203)。
(2)VirtIO 前端驱动处理
- • 前端驱动将 CAN 帧数据封装为描述符链,放入 VirtQueue 的 “可用区域”。
- • 前端驱动调用
virtqueue_kick(vq),通过 KVM 的 KVM_IRQFD 接口触发 “轻量级通知”(无需 VMEXIT),告知 QEMU 有新请求。
(3)QEMU 后端驱动处理
- • QEMU 监听 VirtQueue 的
avail_idx 变化,发现新请求后,直接从共享内存的 VirtQueue 中读取描述符链和 CAN 帧数据。
- • QEMU 后端驱动将 CAN 帧数据通过 Host 的 SocketCAN 接口(如
can0)发送到真实 CAN 总线(或其他模拟设备)。
(4)处理结果反馈
- • CAN 帧发送完成后,QEMU 后端驱动将结果(发送成功)写入 VirtQueue 的 “已用区域”。
- • QEMU 通过 KVM 的
KVM_INTERRUPT 接口触发 Guest 的 CAN 接收中断。
- • KVM 将中断请求转发到 Guest 的 VCPU(Non-Root 模式),Guest 的
virtio_can 前端驱动执行中断服务程序(ISR)。
- • 前端驱动读取 VirtQueue 的 “已用区域”,确认发送成功,返回结果给 Guest 应用。
3. 协同优化关键点
- • 指令执行:Guest 应用、驱动的指令通过 KVM 直接在 ARM CPU 执行,无 TCG 翻译开销。
- • 内存访问:VirtQueue 共享内存通过 KVM 的 Stage-2 页表直接映射,CAN 帧数据无需拷贝,直接从 Guest 内存传递到 Host CAN 卡。
- • 设备 I/O:仅在 “触发中断” 时发生 1 次 VMEXIT,相比传统模拟设备(数十次 VMEXIT),开销大幅降低。
4. 性能对比:纯 QEMU vs QEMU-KVM-VirtIO
该对比验证了 KVM 与 VirtIO 的协同优化效果,使其能满足车载场景中实时通信和高吞吐量的需求。
| 性能指标 |
纯 QEMU(TCG 模式) |
QEMU-KVM-VirtIO |
提升幅度 |
| CAN 帧发送延迟 |
500μs-1ms |
10μs-50μs |
10-50 倍 |
| 每秒 CAN 帧吞吐量 |
1000-5000 帧 |
10 万 - 50 万帧 |
20-100 倍 |
| VMEXIT 次数(每帧) |
20-30 次 |
1-2 次 |
90%+ 减少 |
| CPU 占用率 |
80%-100% |
5%-15% |
80%+ 降低 |
四、QEMU 在其他宿主机环境的优化手段
除了 Linux 平台的 KVM+VirtIO 方案,QEMU 在其他宿主机环境也提供了针对性的性能优化手段,以适配不同车载部署场景:
1. 非 Linux 宿主机:Hyper-V(Windows)/Xen(类 Unix)
- • Hyper-V:QEMU 通过
hv_kvp、hv_balloon 等驱动与 Hyper-V 协同,利用 Hyper-V 的硬件辅助虚拟化(如 AMD-Vi/Intel VT-d)和合成设备(Synthetic Device),性能接近 KVM+VirtIO。
- • Xen:QEMU 作为 Xen 的 “设备模型守护进程”(qemu-dm),配合 Xen 的半虚拟化(PV)和硬件辅助虚拟化(HVM),通过 XenBus 与 Guest 前端驱动通信,优化设备 I/O 性能。
2. 无硬件虚拟化支持的场景:TCG 优化
对于无硬件虚拟化扩展的嵌入式设备(如老旧 ARM Cortex-A 系列),QEMU 通过 TCG 优化提升性能:
- • 指令块缓存优化:扩大 TCG 代码缓存(Code Cache)容量,减少重复翻译。
- • 超标量翻译:一次性翻译多个 Guest 指令为 Host 指令块,提升并行执行效率。
- • 架构专属优化:针对 ARM、RISC-V 等架构的指令集特性,优化 IR 生成和 Host 指令映射(如 ARM NEON 向量指令的批量翻译)。
3. 车载专用优化:实时性增强
针对车载实时系统(如 AUTOSAR RTOS),QEMU 提供实时性优化:
- • 中断延迟控制:通过
--enable-realtime 参数优化 KVM 的 VMEXIT/VMENTRY 调度,将中断延迟控制在 10μs 以内。
- • 时间同步:集成 PTP(精确时间协议),确保 Guest 与 Host 的时间同步,满足车载 CAN 总线的时序要求。
- • 资源隔离:通过 KVM 的 CPU 亲和性配置(taskset),将 VCPU 绑定到专属 Host CPU 核心,避免调度干扰。
五、总结:QEMU 性能优化的核心逻辑与车载启示
QEMU 从 10% 到 80%+ 的性能飞跃,本质是“硬件辅助虚拟化(KVM)解决核心计算瓶颈”与“半虚拟化设备(VirtIO)解决 I/O 瓶颈”的协同优化逻辑:
- • KVM 的核心价值在于 “让指令和内存访问回归硬件原生性能”,通过 VMX/SVM、EPT/Stage-2 MMU 等硬件技术,消除了软件模拟的冗余开销。
- • VirtIO 的核心价值在于 “让设备 I/O 跳过硬件模拟陷阱”,通过标准化的前后端驱动和共享内存队列,实现了高效数据传输。
- • 两者与 QEMU 的协同,既保留了 QEMU 强大的设备模拟能力和跨平台兼容性,又弥补了纯软件仿真的性能短板,为车载等高要求场景提供了可行的虚拟化解决方案。
 发表于 2025-12-15 13:51:18
|
查看: 389|
回复: 0
发表于 2025-12-15 13:51:18
|
查看: 389|
回复: 0
