L7.首席
3741
0
487
在机器人学中,对刚体位姿(位置和姿态)进行精确的数学描述与高效计算至关重要。我们常听到的“旋量”、“四元数”、“李群”、“李代数”等概念,正是为解决机器人运动学、动力学以及SLAM(即时定位与地图构建)中的实际工程问题(如位姿优化、传感器融合)而发展出的强大数学工具。理解它们有助于构建坚实的知识体系,进行更深层次的算法设计与应用。
机器人可视为由一系列连杆(刚体)构成的系统。研究这些刚体在空间中的关系,是机器人技术的核心。欧几里得空间(欧氏空间)是描述这种关系的常用框架,其基本特性是平移和旋转。
在欧氏空间中,通常用笛卡尔坐标系及其之间的关系来描述位姿。坐标系间的关系分为平移和旋转两种基本变换。
图1. 欧氏空间中的平移变换(A)与旋转变换(B)
用数学公式表达:
平移仅需3个参数,而旋转矩阵的9个参数存在冗余和约束。为了简化,发展出了欧拉角、四元数等描述方法。
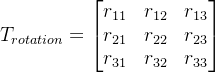
将平移和旋转组合起来描述一个刚体变换,最直观的形式是:
为了统一成单一的矩阵乘法形式(便于后续计算),引入了齐次坐标。将三维点增加一维,通常补为1。
那么,先旋转后平移的复合变换(左乘顺序)为:
由此,我们定义位姿矩阵(变换矩阵)为: 从而,刚体变换方程可简洁地写为:
在机器人状态估计(如移动机器人定位、机械臂手眼标定)中,常需要通过观测数据求解最优位姿。例如,设有固定在刚体上的N个点(真实值),及其在传感器中的观测值,目标是寻找最优变换矩阵 ,最小化重投影误差:
这就需要对目标函数 关于变换矩阵 求导。然而,旋转矩阵必须满足正交性 和行列式为1 的约束。关键问题在于:两个旋转矩阵相加的结果,不再是一个旋转矩阵。即,所有旋转矩阵构成的集合对加法运算不封闭。
图2. 旋转矩阵集合可视作一个流形(如球面),流形上的点(如R)对加法不封闭
由于无法在流形上直接定义导数,传统的微积分工具失效。这正是李群与李代数要解决的核心问题:为这类具有约束的“弯曲”空间(流形)提供一套微积分工具。
群是描述对称性的代数结构。一个群 由一个集合 和一种二元运算 构成,满足以下四条公理(对任意 ):
旋转变换显然满足这些性质,因此旋转矩阵集合在矩阵乘法下构成一个群。
李群:是一个光滑的流形,同时其元素也构成一个群。“光滑”意味着可以在其上做微积分。例如,所有旋转矩阵构成的特殊正交群 SO(3) 就是一个李群。
李代数:对应李群在单位元处的切空间。这是一个向量空间,对加法封闭,非常适合进行微积分运算。
图3. 流形{M}在某点X处的切空间T_X{M}是一个向量空间
图4. 旋转矩阵李群{M}及其在单位元ε处的切空间(李代数)
核心关系:李群(弯曲空间)和李代数(平直切空间)之间通过指数映射和对数映射相互转换。这类似于复变函数中,复数乘法(李群运算)与复数加法(李代数运算)通过指数函数联系起来。
单位复数集合 在乘法下构成李群,满足 。其李代数是虚数轴 。
图5. 单位圆S¹李群与其李代数iR的关系
设初始点 ,经旋转 得到 ,即 。利用欧拉公式 ,有: 并且,
结论:李群上的乘法 对应李代数上的加法 。指数映射将对数空间的向量“卷曲”到群上。
单位四元数集合 也构成李群,其形式为 ,满足 。其李代数是由纯虚四元数构成的三维空间,与 同构。
图6. 单位四元数球面S³李群与其李代数(切平面)的关系
对于纯虚四元数表示的向量 ,经单位四元数 的共轭旋转后得到 。可以推导出类似关系:
指数映射的核心是欧拉公式: 等式右边描述了复平面上单位圆的圆周运动。
图7. e^{iθ} 在复平面上的几何表示:模长为1,幅角为θ
我们可以从极限的角度直观理解 。已知 ,则 。复数相乘意味着旋转和伸缩。当 n 取不同值时, 的极限过程如下:
当 θ=1, n=3 时: 图8. n=3时的逐步旋转
当 θ=1, n=10 时: 图9. n=10时的逐步旋转
当 θ=1, n=50 时: 图10. n=50时,结果已非常接近圆周上1弧度处
当 , 精确落在单位圆上1弧度的位置。这生动展示了指数映射如何将直线上的“距离”映射为圆上的“角度”。
特殊正交群 SO(3) 是所有三维旋转矩阵构成的李群:
其对应的李代数 so(3) 是一个由三维向量 组成的空间,每个向量对应一个反对称矩阵: 其中,反对称算子 定义为: 。
指数映射(李代数 -> 李群): 对旋转矩阵 的正交约束 两边对时间求导,可导出关系:。求解此微分方程得到指数映射关系: 更一般地,写作:
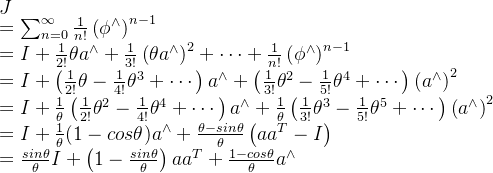
为了计算这个指数映射,将李代数向量表示为旋转轴和角度:,其中 是单位向量,θ 是旋转角。利用反对称矩阵的性质(如 )进行泰勒展开化简,得到著名的罗德里格斯公式: 即: 这给出了从旋转向量(旋量)到旋转矩阵的直接计算方法。
对数映射(李群 -> 李代数): 反之,从旋转矩阵 R 求解旋转轴 a 和角度 θ。对罗德里格斯公式两边求迹: 可得:
旋转轴 a 是旋转矩阵 R 特征值为 1 对应的特征向量,即求解 。
图11. SO(3)李群与so(3)李代数的转换关系示意
特殊欧氏群 SE(3) 描述三维空间的刚体运动(旋转+平移):
其对应的李代数 se(3) 位于 空间中: 其中,,。这里的 就是一个运动旋量。
类似 SO(3) 的推导,通过对 求导,可定义 ,并得到微分方程 的解:
指数映射计算: 对 进行指数展开并利用其幂的规律性,可推导出: 其中, 就是 SO(3) 的指数映射结果(罗德里格斯公式)。而矩阵 J 为:
对数映射:从 SE(3) 的变换矩阵 T 中,可以提取出旋转部分 R,按 SO(3) 的方法得到 (进而得到 a 和 θ)。平移部分 d 满足 ,因此李代数的平移部分可由 求得。
图12. 机器人学中SO(3)/SE(3)与so(3)/se(3)的映射关系总结(图片来源:《视觉SLAM十四讲》)
指数映射 具有以下关键性质,这些性质在优化和插值中非常有用:
李群与李代数为机器人学(以及计算机视觉、SLAM等领域)中描述带约束的旋转与运动提供了完美的数学框架。李群(如SO(3), SE(3)) 作为真实的运动空间,具有良好的几何意义但不利于直接进行微积分;李代数(如so(3), se(3)) 作为其切空间,是向量空间,便于进行导数、优化等数值计算。二者通过指数映射与对数映射相互转换,使得我们能够将复杂的流形上的优化问题,转化为在简单的向量空间中求解,从而有效解决了机器人位姿估计中的优化问题。掌握这一工具,是深入理解现代机器人感知与状态估计算法的关键一步。
收藏0回复 显示全部楼层 举报
发表回复 回帖后跳转到最后一页
手机版|小黑屋|网站地图|云栈社区 ( 苏ICP备2022046150号-2 )
GMT+8, 2026-6-17 15:29 , Processed in 0.912637 second(s), 42 queries , Gzip On.
Powered by Discuz! X3.5
© 2025-2026 云栈社区.
 发表于 2025-12-24 17:19:32
|
查看: 230|
回复: 0
发表于 2025-12-24 17:19:32
|
查看: 230|
回复: 0

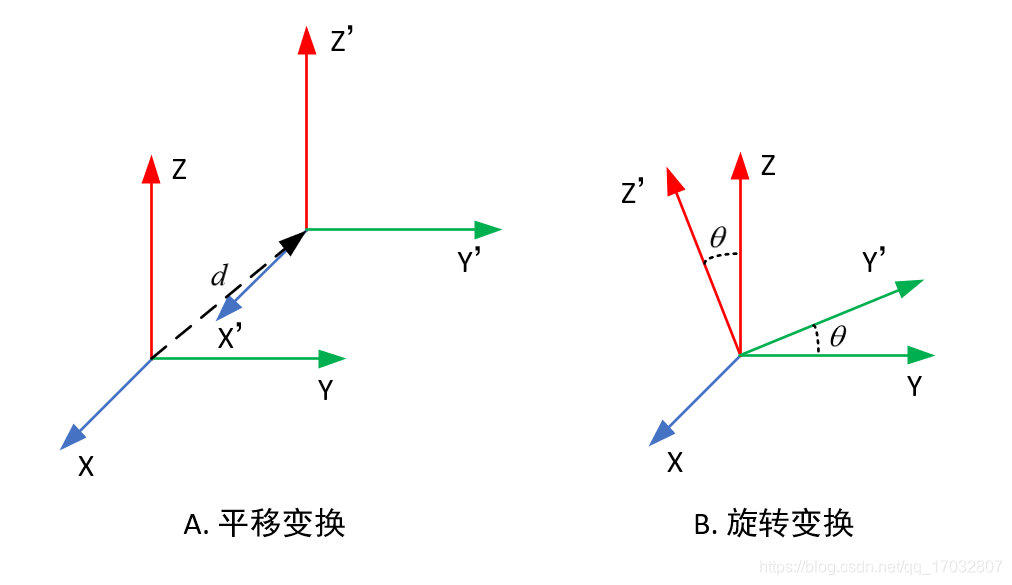 图1. 欧氏空间中的平移变换(A)与旋转变换(B)
图1. 欧氏空间中的平移变换(A)与旋转变换(B)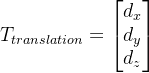





 从而,刚体变换方程可简洁地写为:
从而,刚体变换方程可简洁地写为:

 (真实值),及其在传感器中的观测值
(真实值),及其在传感器中的观测值 ,目标是寻找最优变换矩阵
,目标是寻找最优变换矩阵  ,最小化重投影误差:
,最小化重投影误差:

 关于变换矩阵
关于变换矩阵  和行列式为1
和行列式为1  的约束。关键问题在于:两个旋转矩阵相加的结果,不再是一个旋转矩阵。即,所有旋转矩阵构成的集合对加法运算不封闭。
的约束。关键问题在于:两个旋转矩阵相加的结果,不再是一个旋转矩阵。即,所有旋转矩阵构成的集合对加法运算不封闭。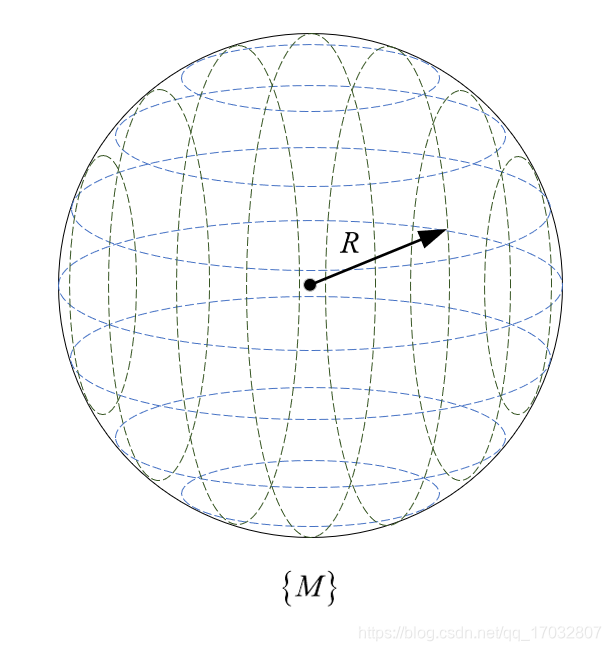 图2. 旋转矩阵集合可视作一个流形(如球面),流形上的点(如R)对加法不封闭
图2. 旋转矩阵集合可视作一个流形(如球面),流形上的点(如R)对加法不封闭 由一个集合
由一个集合  和一种二元运算
和一种二元运算  构成,满足以下四条公理(对任意
构成,满足以下四条公理(对任意  ):
):

 ,使得
,使得 
 ,存在唯一逆元
,存在唯一逆元 
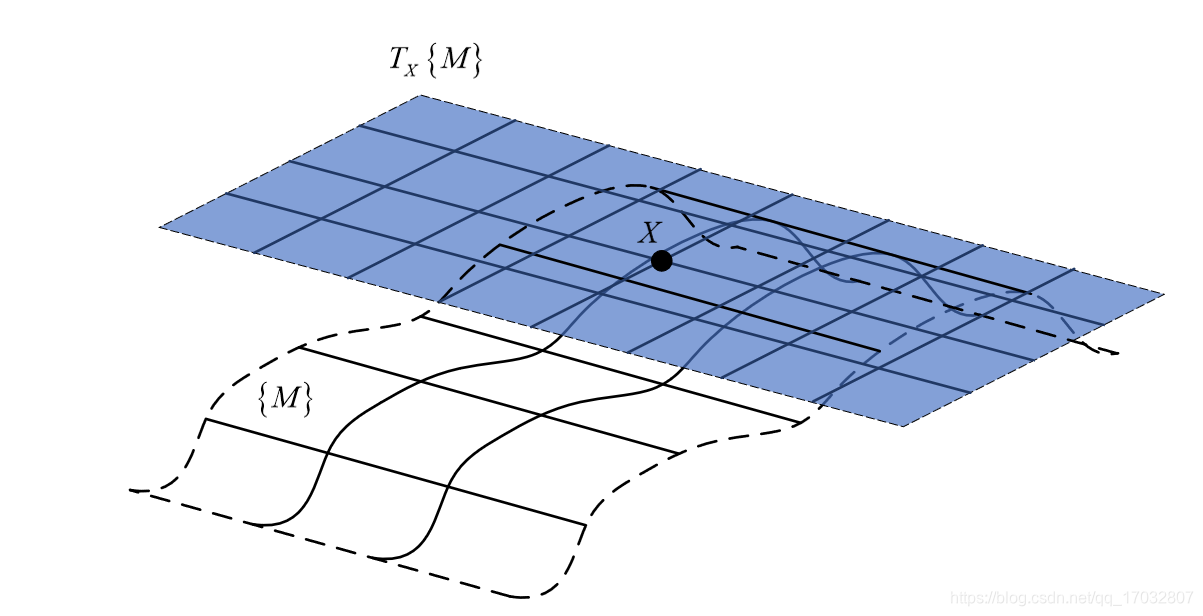 图3. 流形{M}在某点X处的切空间T_X{M}是一个向量空间
图3. 流形{M}在某点X处的切空间T_X{M}是一个向量空间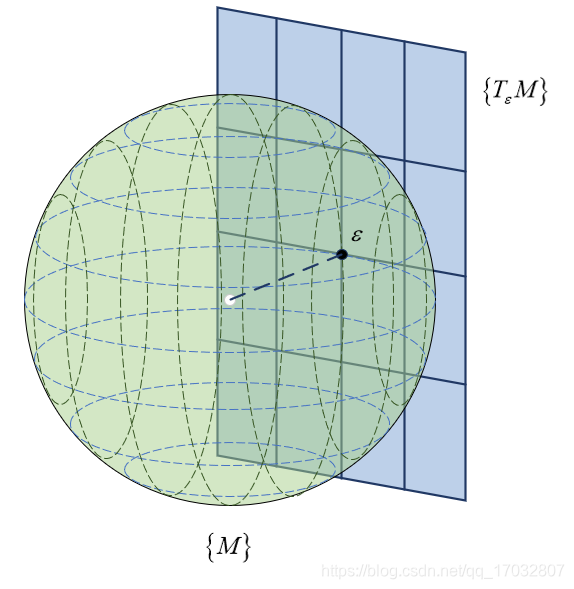 图4. 旋转矩阵李群{M}及其在单位元ε处的切空间(李代数)
图4. 旋转矩阵李群{M}及其在单位元ε处的切空间(李代数) 在乘法下构成李群,满足
在乘法下构成李群,满足  。其李代数是虚数轴
。其李代数是虚数轴  。
。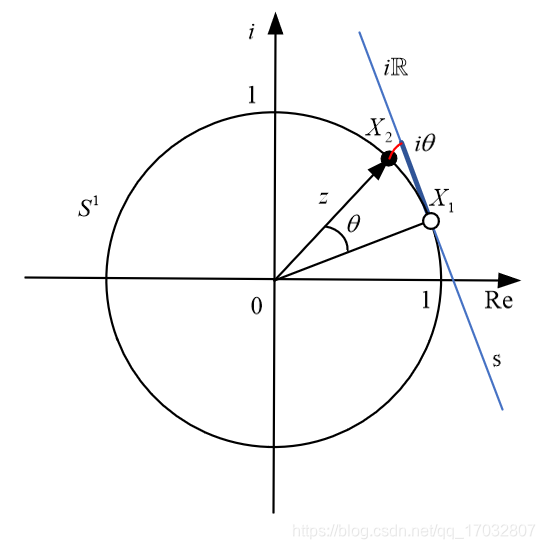 图5. 单位圆S¹李群与其李代数iR的关系
图5. 单位圆S¹李群与其李代数iR的关系 ,经旋转
,经旋转  得到
得到  ,即
,即  。利用欧拉公式
。利用欧拉公式  并且,
并且,

 。指数映射将对数空间的向量“卷曲”到群上。
。指数映射将对数空间的向量“卷曲”到群上。 也构成李群,其形式为
也构成李群,其形式为  ,满足
,满足  。其李代数是由纯虚四元数构成的三维空间,与
。其李代数是由纯虚四元数构成的三维空间,与  同构。
同构。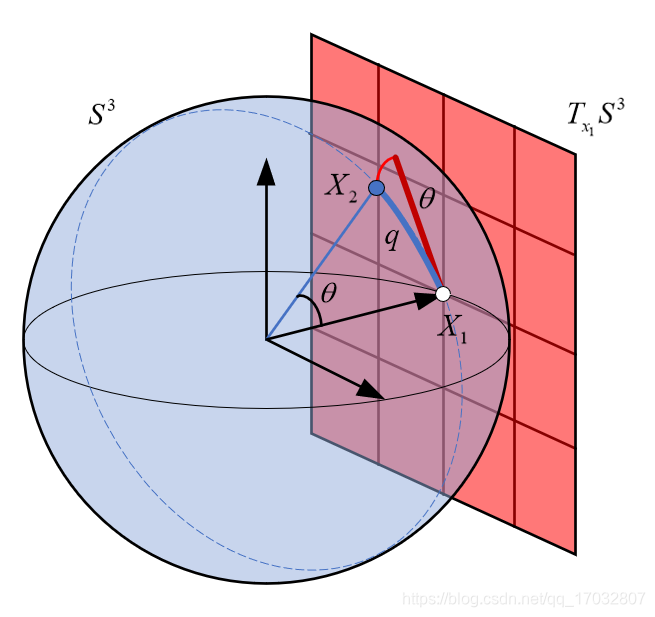 图6. 单位四元数球面S³李群与其李代数(切平面)的关系
图6. 单位四元数球面S³李群与其李代数(切平面)的关系 ,经单位四元数
,经单位四元数  的共轭旋转后得到
的共轭旋转后得到  。可以推导出类似关系:
。可以推导出类似关系:


 等式右边描述了复平面上单位圆的圆周运动。
等式右边描述了复平面上单位圆的圆周运动。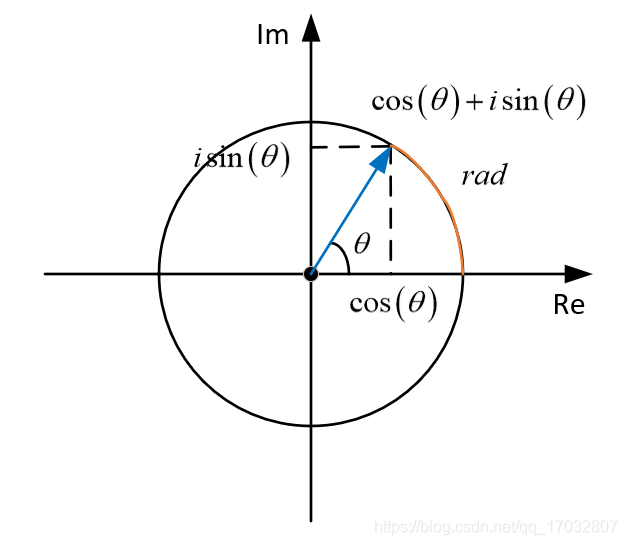 图7. e^{iθ} 在复平面上的几何表示:模长为1,幅角为θ
图7. e^{iθ} 在复平面上的几何表示:模长为1,幅角为θ 。已知
。已知  ,则
,则  。复数相乘意味着旋转和伸缩。当 n 取不同值时,
。复数相乘意味着旋转和伸缩。当 n 取不同值时,  的极限过程如下:
的极限过程如下:
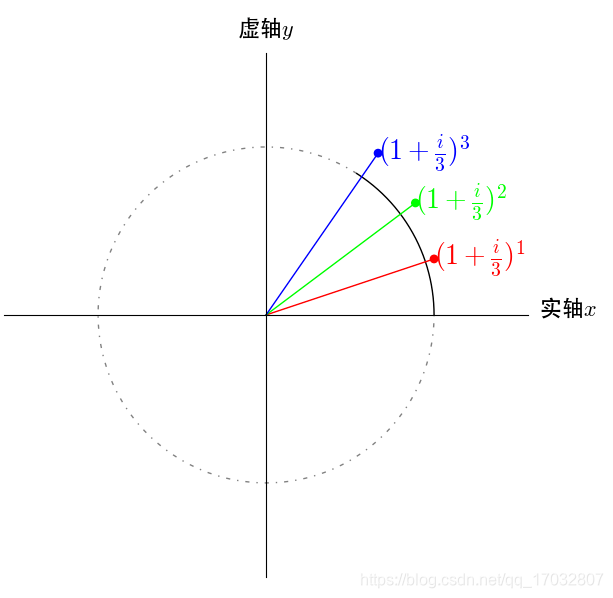 图8. n=3时的逐步旋转
图8. n=3时的逐步旋转
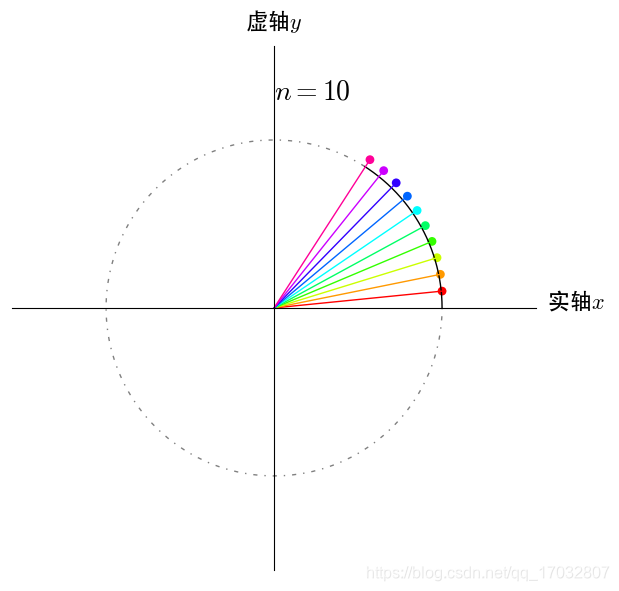 图9. n=10时的逐步旋转
图9. n=10时的逐步旋转
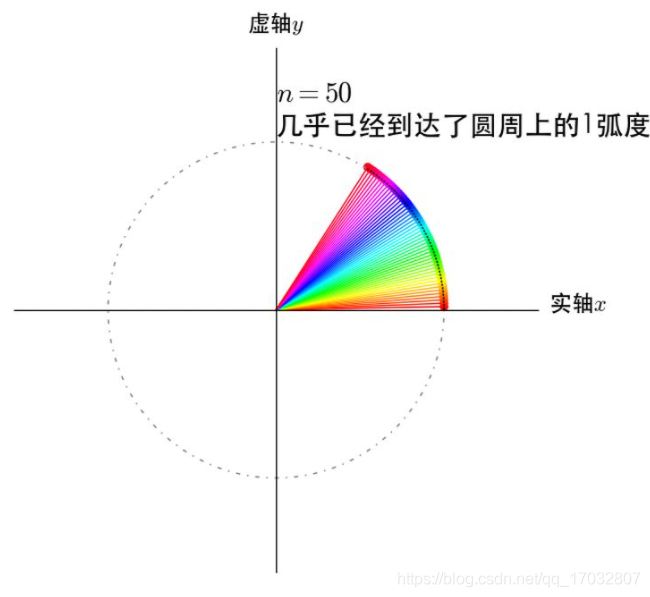 图10. n=50时,结果已非常接近圆周上1弧度处
图10. n=50时,结果已非常接近圆周上1弧度处 ,
,  精确落在单位圆上1弧度的位置。这生动展示了指数映射如何将直线上的“距离”映射为圆上的“角度”。
精确落在单位圆上1弧度的位置。这生动展示了指数映射如何将直线上的“距离”映射为圆上的“角度”。
 组成的空间,每个向量对应一个反对称矩阵:
组成的空间,每个向量对应一个反对称矩阵:
 其中,反对称算子
其中,反对称算子  定义为:
定义为:
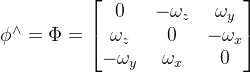
 。
。 的正交约束
的正交约束  两边对时间求导,可导出关系:
两边对时间求导,可导出关系: 。求解此微分方程得到指数映射关系:
。求解此微分方程得到指数映射关系:
 更一般地,写作:
更一般地,写作:

 ,其中
,其中  是单位向量,θ 是旋转角。利用反对称矩阵的性质(如
是单位向量,θ 是旋转角。利用反对称矩阵的性质(如  )进行泰勒展开化简,得到著名的罗德里格斯公式:
)进行泰勒展开化简,得到著名的罗德里格斯公式:
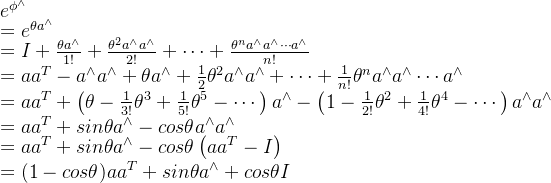 即:
即:
 这给出了从旋转向量(旋量)到旋转矩阵的直接计算方法。
这给出了从旋转向量(旋量)到旋转矩阵的直接计算方法。 可得:
可得:
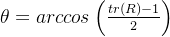
 。
。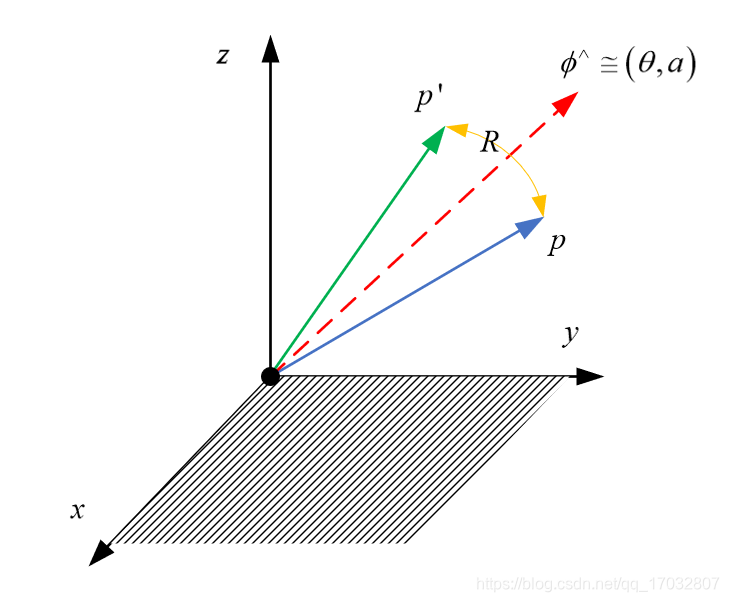 图11. SO(3)李群与so(3)李代数的转换关系示意
图11. SO(3)李群与so(3)李代数的转换关系示意
 空间中:
空间中:
 其中,
其中, ,
, 。这里的
。这里的  就是一个运动旋量。
就是一个运动旋量。 求导,可定义
求导,可定义  ,并得到微分方程
,并得到微分方程  的解:
的解:

 进行指数展开并利用其幂的规律性,可推导出:
进行指数展开并利用其幂的规律性,可推导出:
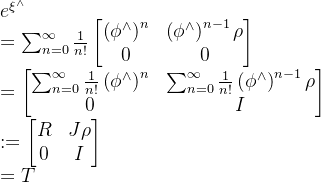 其中,
其中, 就是 SO(3) 的指数映射结果(罗德里格斯公式)。而矩阵 J 为:
就是 SO(3) 的指数映射结果(罗德里格斯公式)。而矩阵 J 为:
 ,因此李代数的平移部分可由
,因此李代数的平移部分可由  求得。
求得。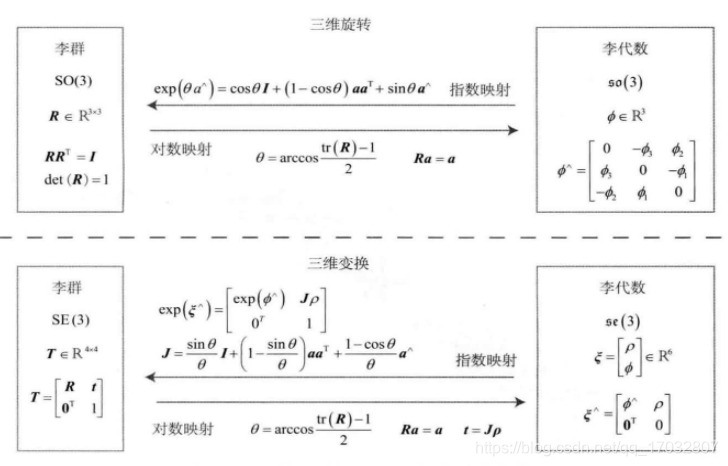 图12. 机器人学中SO(3)/SE(3)与so(3)/se(3)的映射关系总结(图片来源:《视觉SLAM十四讲》)
图12. 机器人学中SO(3)/SE(3)与so(3)/se(3)的映射关系总结(图片来源:《视觉SLAM十四讲》) 具有以下关键性质,这些性质在优化和插值中非常有用:
具有以下关键性质,这些性质在优化和插值中非常有用: (可加性)
(可加性)
 (逆元对应)
(逆元对应) (伴随性质)
(伴随性质)