激光雷达作为自动驾驶汽车关键的感知传感器,通过发射激光束并接收其从物体表面反射回来的信号,精确测量目标的距离与位置,从而生成描述环境的三维点云数据。这项技术为自动驾驶系统提供了清晰、精准的障碍物感知能力。

图片源自网络
然而,在实际道路场景中,当激光束照射到如车牌金属层、铝合金交通标志或高反光贴膜等反射率极高的表面时,其反射行为与常规物体存在显著差异。这些表面会将大量激光能量几乎无损耗地沿原路径强烈反射回接收器。激光雷达接收器对强反射信号极为敏感,这种异常反射极易在点云数据中诱发“鬼影”与“膨胀”问题,为后续的环境感知算法带来巨大挑战。

点云“鬼影”与“膨胀”现象解析
鬼影 (Ghosting)
指的是在点云数据中出现了实际环境中并不存在的虚假物体轮廓。例如,一块位于车辆左侧的高反光交通标志牌,其强反射信号可能在点云中于车辆正前方错误地生成一个类似的点云簇。这会导致自动驾驶系统误判前方存在真实障碍物,从而引发不必要的紧急制动或转向,严重影响行车安全与感知可靠性。
含有“鬼影”的点云,图片源自网络
膨胀 (Bloating)
是指真实物体的点云轮廓因信号过强而发生扩散,使其尺寸被显著放大。例如,一块实际宽度仅为几十厘米的反光标牌,在点云中可能呈现为一两米宽的模糊团块。这种现象不仅影响对物体真实尺寸的准确判断,还会严重干扰后续的障碍物分类、跟踪与轨迹预测等关键任务。
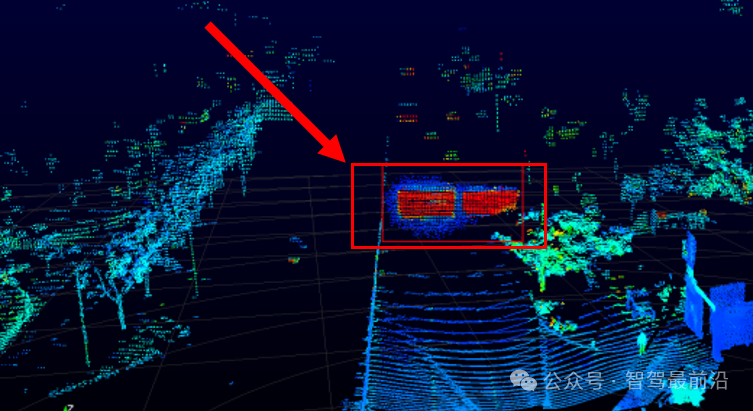
路牌点云“膨胀”,图片源自网络
问题根源:高反射表面的信号干扰机制
“鬼影”与“膨胀”问题的共同根源在于高反射表面对激光雷达信号的异常反射。要理解其原理,需回归激光雷达的信号收发机制。
激光雷达发射极短的光脉冲。在击中物体表面后,一部分光被吸收,一部分散射,剩余部分反射回传感器。系统通过计算光脉冲的飞行时间来确定距离。
- 漫反射表面:大多数普通物体(如沥青路面、车身油漆)属于漫反射表面,光线被均匀地散射向各个方向,只有一小部分能量返回接收器,信号强度适中,信噪比稳定。
- 高反射/角反射表面:交通标志牌等使用的特殊材料属于角反射体,其特性是将绝大部分入射光沿原路径精确反射回去。这会在极短时间内向激光雷达接收器“推回”远超常规水平的能量。

图片源自网络
这种异常强烈的回波信号,是导致点云失真的直接原因:
-
直接强反射导致的“膨胀”:接收器捕获到强度异常高的回波,可能因其超过常规动态范围而导致飞行时间计算出现微小偏差,或使激光束在探测边缘区域的响应失真,最终表现为点云从物体真实表面“扩散”开来,形成尺寸放大的“膨胀”效果。
-
多路径反射与串扰引发的“鬼影”:
- 多路径反射:强反射光并非总是直接返回。它可能在传感器内部结构或其他物体表面发生一次或多次反射后,再被高反射目标反射回接收器。这种经过更长路径的信号,会被系统错误地解读为来自更远距离的反射点,从而在真实物体后方或侧方生成虚假的“鬼影”点云。
- 通道间串扰:现代激光雷达通常集成多个发射与接收通道并行工作。当某一通道接收到过强的反射信号时,该信号可能“泄漏”或干扰到相邻通道的接收电路,导致其他通道产生本不存在的错误点云,这也是形成结构性“鬼影”的重要原因。

为何“鬼影”和“膨胀”具有欺骗性?
这些异常点云之所以能轻易迷惑感知算法,在于它们并非随机噪声,而是呈现出一定的空间结构。
激光雷达输出的每一个点都代表三维空间中的一个反射源。当大量错误点(源于多路径反射或串扰)在空间中以某种规律分布时,会形成看似连续的团簇或轮廓。对于依赖点云聚类和模式识别的感知算法而言,这些具有结构的虚假团簇与真实障碍物的点云特征非常相似,极易被误识别为真实物体、错误估计其尺寸或运动轨迹。

图片源自网络
总结
高反射物体引发的激光雷达点云“鬼影”与“膨胀”,是自动驾驶感知领域亟待攻克的技术挑战。其物理本质在于高反射表面产生了远超常规的强回波信号,并引发了多路径反射和接收通道间的串扰。这些异常信号被系统误判为真实的空间反射点,最终形成了不存在的虚假物体轮廓(鬼影),或扭曲了真实物体的点云尺寸(膨胀)。深入理解并解决这些问题,是实现更高精度、更可靠自动驾驶环境感知的关键一步。 |  发表于 2025-12-24 21:22:15
|
查看: 340|
回复: 0
发表于 2025-12-24 21:22:15
|
查看: 340|
回复: 0
