一、Linux 设备驱动模型(补充 / 完善面试题答案)
1. Linux 设备驱动模型的核心组件有哪些?
- kobject:最基础对象,提供引用计数、sysfs 文件系统导出、对象生命周期管理;
- kset:kobject 的集合,按类别管理同类 kobject(如所有设备对象),支持统一事件处理;
- bus:总线抽象(如 platform/I2C/spi),是设备与驱动的连接媒介,定义匹配 / 解绑规则;
- device:表示硬件设备(物理 / 逻辑),存储设备属性、父 / 子设备关系,关联到具体总线;
- driver:驱动抽象,包含 probe(设备匹配后初始化)、remove(设备移除时清理)等核心接口;
- class:按功能归类设备(如 led/input),简化用户态访问(/sys/class/)。

图1:Linux设备驱动模型中kobject数据结构的层次关系示意图
2. 驱动和设备是如何匹配的?
核心基于总线的匹配函数,分三类场景:
- 设备树匹配(主流):驱动的
of_match_table 中 compatible 属性,与设备树中设备节点的 compatible 字符串匹配;
- 平台总线匹配:平台设备(
platform_device)的 name 与平台驱动(platform_driver)的 driver.name 完全匹配;
- ID 匹配:驱动的 id_table(如 I2C 的driver.id_table )与设备的 ID(如 I2C 的 client.addr )匹配;匹配成功后,总线调用驱动的 probe 函数完成设备初始化。
3. 设备树在驱动开发中的作用是什么?
- 硬件解耦:将硬件参数(寄存器地址、GPIO、中断号、时钟)从驱动代码中剥离,集中在设备树(.dts),无需修改驱动适配不同硬件;
- 动态配置:运行时通过设备树解析硬件信息,支持多平台复用同一驱动;
- 标准化:遵循 DTB 规范,统一硬件描述格式,简化驱动移植;
- 资源管理:驱动通过
of_ 接口(如 of_get_address)获取硬件资源,替代传统 platform_get_resource。
二、GPIO 子系统
1. GPIO 子系统架构?
- 底层:GPIO 控制器硬件驱动(如芯片级 GPIO 控制器),实现寄存器操作(方向 / 电平 / 中断);
- 核心层(gpiolib):提供统一的 GPIO 抽象接口(
gpio_request/gpio_set_value),屏蔽不同控制器的硬件差异;
- 上层:驱动层调用 gpiolib 接口操作 GPIO,支持设备树解析、中断映射、sysfs 导出。
2. GPIO 子系统实现?(核心逻辑)
- GPIO 控制器注册:驱动实现
gpio_chip 结构体(包含方向 / 电平 / 中断操作接口),通过 gpiochip_add_data 注册到 gpiolib;
- GPIO 编号管理:为每个 GPIO 分配全局编号(静态 /base 或动态),关联到具体控制器;
- GPIO 请求 / 释放:驱动通过
gpio_request 申请 GPIO(防止冲突),gpio_free 释放;
- 电平 / 方向操作:通过
gpio_direction_input/output 设置方向,gpio_get_value/set_value 读写电平。
3. GPIO 子系统的主要组件有哪些?
- gpio_chip:表示一个 GPIO 控制器,包含控制器的硬件操作接口(如方向设置、电平读写);
- gpio_desc:单个 GPIO 引脚的描述符,存储 GPIO 编号、方向、电平、中断属性、所属
gpio_chip;
- gpiolib:核心库,提供 GPIO 申请、释放、电平操作、中断映射的统一接口;
- GPIO 控制器驱动:硬件层实现,对具体芯片的 GPIO 寄存器(如 NXP 高通 GPIO 控制器)操作。
4. 如何在驱动中使用 GPIO?
// 1. 从设备树获取GPIO编号
int gpio_num = of_get_named_gpio(np, "reset-gpio", 0);
// 2. 申请GPIO
if (gpio_request(gpio_num, "reset-gpio") < 0) return -EBUSY;
// 3. 设置方向(输出)
gpio_direction_output(gpio_num, 1);
// 4. 操作电平
gpio_set_value(gpio_num, 0); // 拉低
// 5. 释放GPIO(驱动卸载时)
gpio_free(gpio_num);
进阶:使用 devm_gpio_request(设备管理接口),自动释放 GPIO,避免内存泄漏。
5. GPIO 中断是如何实现的?
- 中断映射:通过
gpio_to_irq 将 GPIO 编号转换为中断号;
- 申请中断:调用
request_irq 注册中断处理函数,指定触发方式(上升沿 / 下降沿 / 双边沿);
- 硬件触发:GPIO 引脚电平变化触发控制器中断,内核调用注册的中断处理函数;
- 中断释放:驱动卸载时调用
free_irq 释放中断。
示例:
int irq_num = gpio_to_irq(gpio_num);
request_irq(irq_num, gpio_irq_handler, IRQF_TRIGGER_RISING, "gpio-irq", dev);
三、Pinctrl 子系统
1. Pinctrl 子系统架构?
- 核心层:提供引脚复用、配置(上拉 / 下拉 / 速率)的统一接口;
- 硬件层:芯片级 pinctrl 驱动(如 pinctrl-s32k),实现寄存器级引脚配置;
- 设备树层:描述引脚组(pin group)、复用功能(function)、配置属性;
- 接口层:驱动通过
pinctrl_get/pinctrl_select_state 调用配置。
2. Pinctrl 子系统实现?(核心步骤)
- pinctrl 驱动注册:实现
pinctrl_desc 结构体(包含引脚配置、复用接口),通过 pinctrl_register 注册;
- 设备树解析:解析设备节点的
pinctrl-0/pinctrl-names 属性,获取引脚状态(默认 / 休眠);
- 引脚配置:驱动通过
pinctrl_select_state 选择引脚状态,底层驱动修改寄存器配置复用 / 上下拉。
3. Pinctrl 子系统的作用是什么?
- 引脚复用:配置引脚功能(如同一引脚切换为 GPIO/I2C_SDA/SPI_CLK);
- 引脚配置:设置引脚的电气特性(上拉 / 下拉 / 驱动强度、速率、开漏 / 推挽);
- 引脚管理:统一管理系统所有引脚,避免引脚冲突;
- 状态切换:支持引脚在不同状态(默认 / 休眠 / 唤醒)下的配置切换,适配低功耗场景。
4. Pinctrl 与 GPIO 子系统的关系是什么?
- 依赖关系:GPIO 引脚必须先通过 Pinctrl 配置为 “GPIO 功能”,才能被 GPIO 子系统操作;
- 分工不同:Pinctrl 负责引脚的 “复用 + 电气配置”(硬件属性),GPIO 负责引脚的 “方向 + 电平 + 中断”(功能操作);
- 流程联动:驱动先通过 Pinctrl 将引脚设为 GPIO 模式,再调用 GPIO 子系统操作电平 / 中断。
5. 设备树中如何描述 Pinctrl 配置?
dts
// 1. 定义引脚组和配置
pinctrl@40014000 {
pinctrl_my_gpio: my-gpio-grp {
pinctrlx = <PIN_PA0L_GPIOx>; // 复用为GPIO
bias-pull-up; // 上拉
drive-strength = <20>; // 驱动强度20mA
};
};
// 2. 设备节点引用
my_device {
compatible = "vendor,my-device";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_my_gpio>; // 关联引脚配置
reset-gpio = <&gpioa 1 GPIO_ACTIVE_LOW>;
};
四、I2C 子系统
1. I2C 子系统架构?
- 硬件层:I2C 控制器驱动(如 I2c-imx),实现总线时序(START/STOP/ACK)、寄存器操作;
- 核心层:I2C 核心(i2c-core),提供总线管理、设备 / 驱动注册、数据传输接口;
- 设备层:
i2c_client(表示 I2C 设备),关联设备地址、总线号、设备树节点;
- 驱动层:
i2c_driver(I2C 设备驱动),实现 probe/remove、数据传输接口。
2. I2C 子系统实现?(核心逻辑)
- 控制器注册:I2C 控制器驱动通过
i2c_add_adapter 注册适配器(i2c_adapter);
- 设备注册:从设备树解析 I2C 设备节点,创建
i2c_client 并关联到适配器;
- 驱动匹配:
i2c_driver 的 of_match_table 与 i2c_client 的设备树节点匹配,调用 probe;
- 数据传输:驱动通过
i2c_transfer/i2c_smbus_read/write 完成数据收发。
3. I2C 子系统的主要组件有哪些?
- i2c_adapter:表示 I2C 控制器(适配器),管理一条 I2C 总线,提供时序驱动;
- i2c_client:表示总线上的 I2C 设备,包含设备地址、所属 adapter、设备树信息;
- i2c_driver:I2C 设备驱动,包含匹配表、probe/remove、数据传输接口;
- i2c_msg:I2C 传输消息结构体,描述传输方向、地址、数据长度、数据缓冲区;
- i2c-core:核心层,负责 adapter/client/driver 的管理、匹配、传输调度。
4. I2C 设备驱动如何与设备匹配?
- 设备树匹配(主流):
i2c_driver 的 of_match_table 中 compatible 与设备树 I2C 子节点的 compatible 匹配;
- ID 匹配:
i2c_driver 的 id_table(包含设备名 / 地址)与 i2c_client 的 name/addr 匹配;
- 名称匹配: i2c_driver 的driver.name与 i2c_client 的name 匹配; 匹配成功后,内核调用 i2c_driver 的 probe函数,传入 i2c_client 。
5. 如何在 I2C 驱动中进行数据传输?
// 方式1:i2c_transfer(通用)
struct i2c_msg msgs[] = {
// 第一步:读寄存器地址
{ .addr = client->addr, .flags = 0, .len = 1, .buf = ®_addr },
// 第二步:读寄存器数据
{ .addr = client->addr, .flags = I2C_M_RD, .len = 2, .buf = data_buf },
};
i2c_transfer(client->adapter, msgs, ARRAY_SIZE(msgs));
// 方式2:i2c_smbus(简化)
u16 data = i2c_smbus_read_word_data(client, reg_addr);
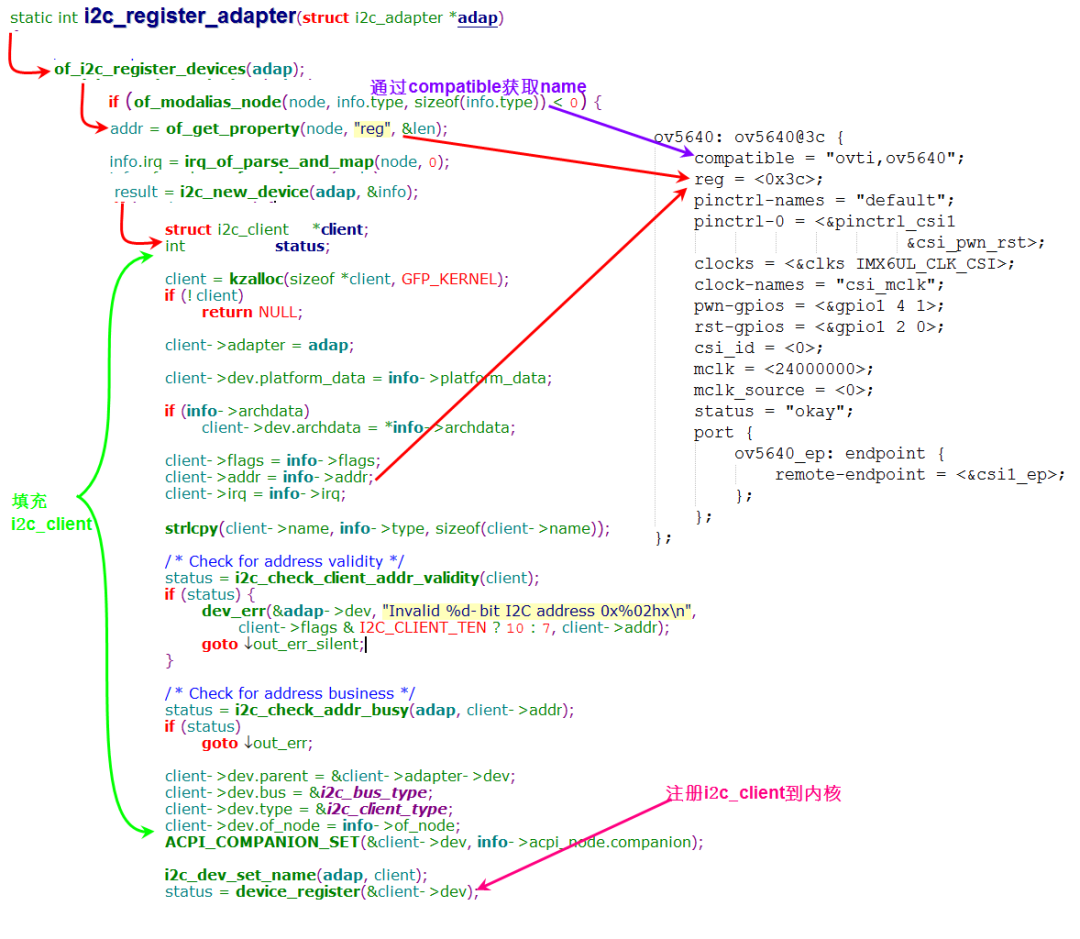
图2:Linux内核中I2C设备注册的核心代码流程
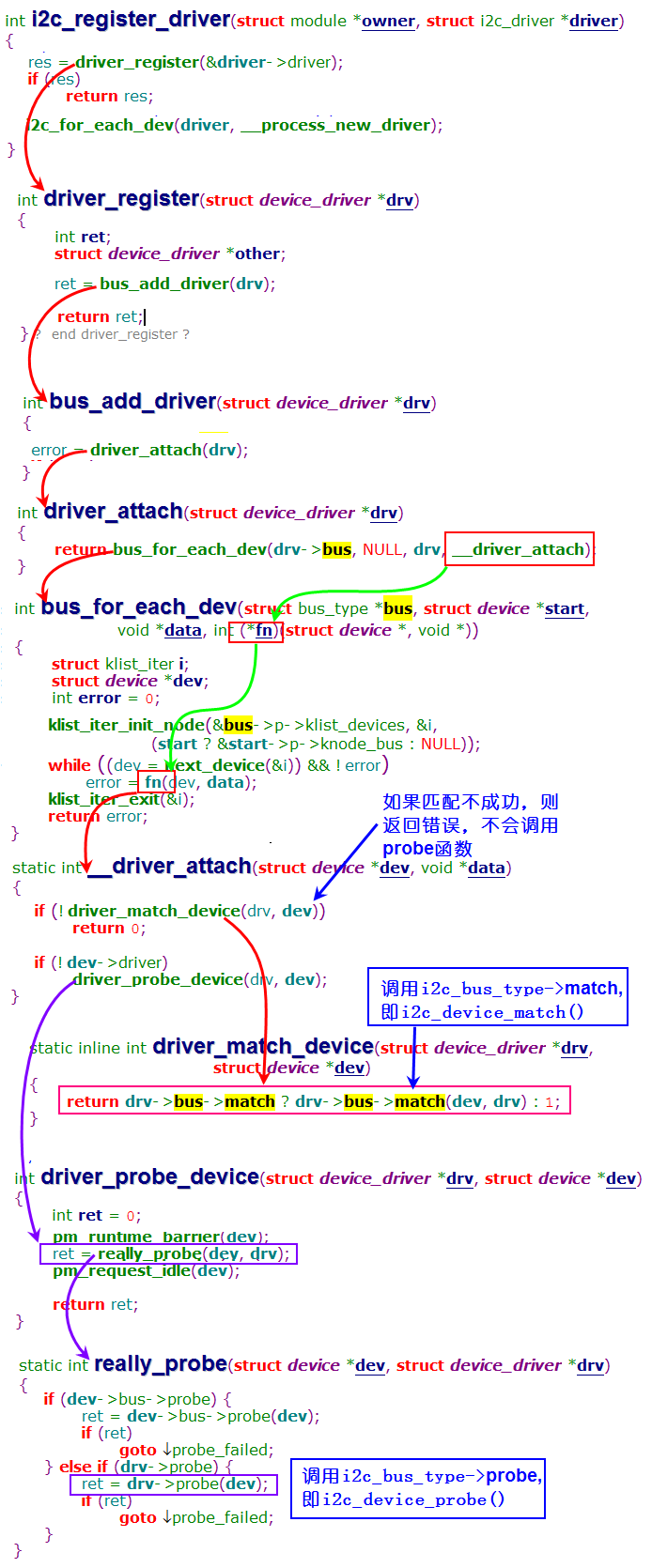
图3:Linux I2C驱动注册、设备匹配及probe调用的函数流程图
五、SPI 子系统
1. SPI 子系统架构?
- 硬件层:SPI 控制器驱动(如 spi-imx),实现 SPI 时序(CLK/MOSI/MISO/CS)、寄存器操作;
- 核心层:SPI 核心(spi-core),管理适配器、设备、驱动,提供传输接口;
- 设备层:
spi_device(SPI 设备),包含片选号、传输模式、速率、设备树信息;
- 驱动层:
spi_driver(SPI 设备驱动),实现 probe/remove、数据传输逻辑。
2. SPI 子系统实现?(核心逻辑)
- 控制器注册:SPI 控制器驱动通过
spi_register_master 注册主控制器(spi_master);
- 设备注册:从设备树解析 SPI 子节点,创建
spi_device 并关联到 spi_master;
- 驱动匹配:
spi_driver 的 of_match_table 与 spi_device 的设备树节点匹配,调用 probe;
- 数据传输:驱动通过
spi_transfer/spi_write/read 完成数据收发。
3. SPI 子系统的主要组件有哪些?
- spi_master:表示 SPI 控制器(主设备),管理一条 SPI 总线,提供时序驱动;
- spi_device:表示 SPI 从设备,包含片选号、传输速率、模式(CPOL/CPHA)、所属 master;
- spi_driver:SPI 设备驱动,包含匹配表、probe/remove、数据传输接口;
- spi_message:SPI 传输消息,包含多个
spi_transfer,支持链式传输;
- spi_transfer:单个 SPI 传输单元,描述传输方向、数据长度、缓冲区、片选控制。
4. SPI 设备驱动如何与设备匹配?
- 设备树匹配(主流):
spi_driver 的 of_match_table 中 compatible 与设备树 SPI 子节点的 compatible 匹配;
- ID 匹配:
spi_driver 的 id_table(设备名)与 spi_device 的 modalias 匹配;
- 名称匹配 : spi_driver的 driver.name与 spi_device 的modalias匹配; 匹配成功后,内核调用 spi_driver的probe 函数,传入 spi_device 。
5. 如何在 SPI 驱动中进行数据传输?
// 构造传输结构体
struct spi_transfer t = {
.tx_buf = tx_buf, // 发送缓冲区
.rx_buf = rx_buf, // 接收缓冲区
.len = 4, // 传输长度
.speed_hz = 1000000, // 速率1MHz
.cs_change = 0, // 传输后不释放CS
};
struct spi_message msg;
spi_message_init(&msg);
spi_message_add_tail(&t, &msg);
// 执行传输
spi_sync(spi, &msg);
六、设备树与驱动匹配

图4:Linux内核中platform_device等数据结构与设备树(Device Tree)节点的关联关系示意图
1. 设备树中的 compatible 属性有什么作用?
- 核心作用:驱动与设备的匹配关键字,是设备树匹配的核心依据;
- 格式规则:字符串格式为 “厂商名,设备名”(如 “nxp,s32k344-i2c”),可包含多个字符串(兼容不同驱动);
- 匹配逻辑:驱动的
of_match_table 遍历 compatible 字符串列表,只要有一个匹配即触发 probe;
- 兼容性:支持 “向下兼容”(如新设备兼容旧驱动的
compatible 字符串)。
2. 驱动如何获取设备树中的属性?
通过内核 of_ 系列接口解析:
struct device_node *np = dev->of_node;
// 1. 获取整型属性
u32 reg_val;
of_property_read_u32(np, "reg", ®_val);
// 2. 获取字符串属性
char name[32];
of_property_read_string(np, "name", name);
// 3. 获取地址属性
struct resource res;
of_address_to_resource(np, 0, &res);
// 4. 获取数组属性
u32 arr[4];
of_property_read_u32_array(np, "data-arr", arr, 4);
3. 如何处理设备树中的 GPIO 描述?
- 设备树描述格式:
gpio = <&gpio控制器 引脚号 标志>;(如reset-gpio = <&gpioa 5 GPIO_ACTIVE_LOW>;);
- 驱动解析:
// 方式1:直接获取GPIO编号
int gpio = of_get_named_gpio(np, "reset-gpio", 0);
// 方式2:获取gpio_desc(推荐,支持更多特性)
struct gpio_desc *desc = gpiod_get_from_of_node(np, "reset-gpio", 0,
GPIOD_OUT_HIGH, NULL);
// 操作GPIO
gpiod_set_value(desc, 0);
// 释放
gpiod_put(desc);
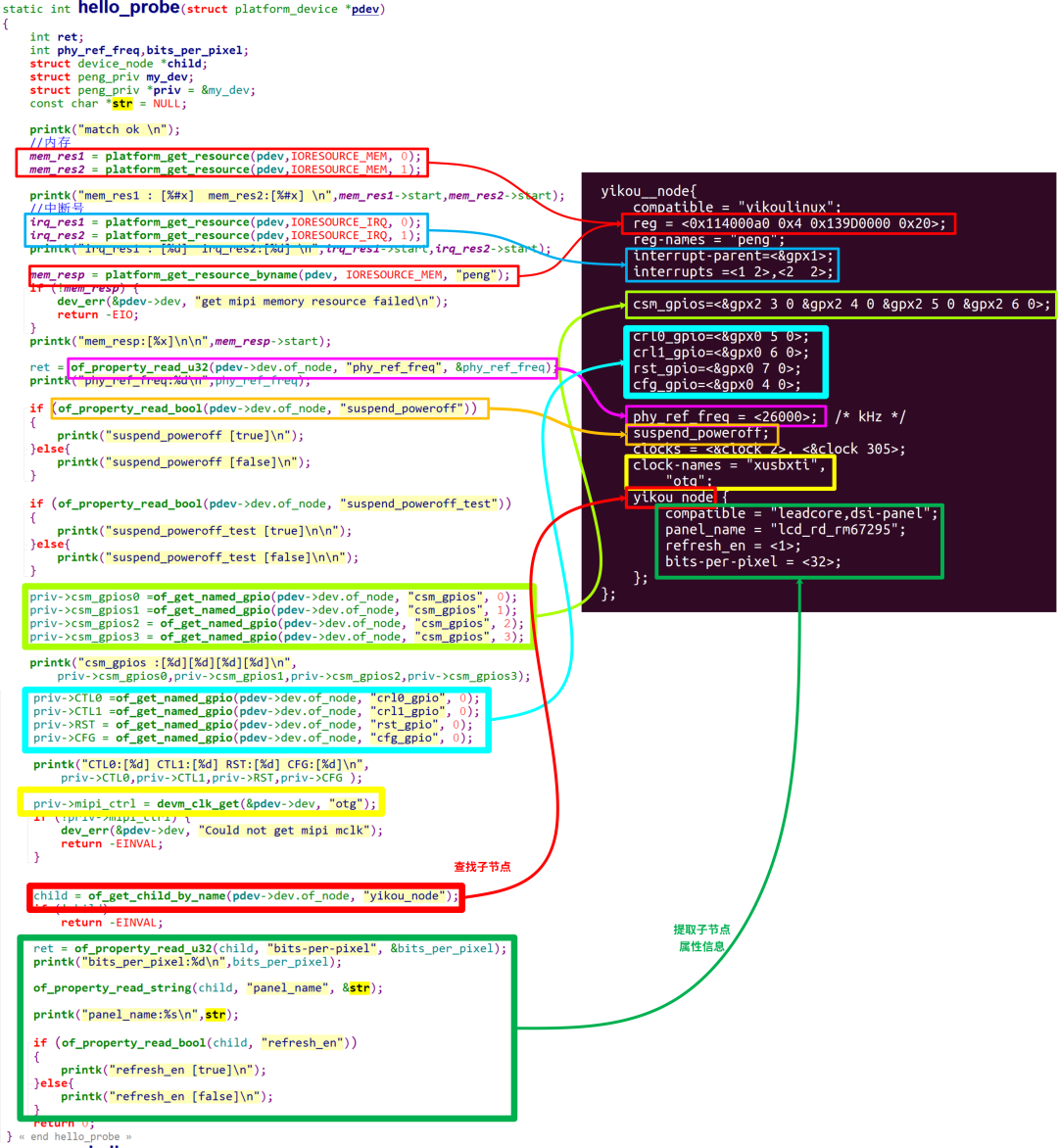
图5:Linux设备驱动中从设备树节点解析并获取硬件参数(如phy_ref_freq, panel_name)的代码示例
七、驱动框架综合应用
1. 如何确保驱动资源的正确释放?
- *设备管理接口(devm_)**:优先使用
devm_kzalloc/devm_gpio_request/devm_request_irq,内核自动在设备卸载时释放资源,避免手动泄漏;
- remove/exit 函数:在驱动
remove(设备移除)/exit(模块卸载)函数中,释放未使用 devm 的资源(如手动分配的内存、注册的字符设备);
- 错误回滚:probe 函数中,若某一步失败,回滚已分配的资源(如 goto 清理);
示例:
int my_probe(...){
void *ptr = devm_kzalloc(dev, size, GFP_KERNEL);
int irq = devm_request_irq(dev, irq_num, handler, 0, "irq", dev);
if (irq < 0) return irq; // 自动释放ptr
// devm资源无需手动回滚
struct cdev *cdev = cdev_alloc();
if (!cdev) {
ret = -ENOMEM;
goto err_cdev;
}
return 0;
err_cdev:
// 手动释放非devm资源
ret = -ENOMEM;
}
void my_remove(...){
// 仅释放非devm资源
cdev_del(cdev);
}
2. 如何处理驱动的依赖关系?
- 模块依赖:通过
MODULE_DEPENDS 声明依赖模块(如MODULE_DEPENDS("i2c-core")),或 modprobe 时指定依赖;
- 总线依赖:确保驱动依赖的总线(如 I2C/spi)已加载,可在 probe 中检查总线状态;
- 硬件依赖:通过设备树
depends-on 属性,确保依赖设备先初始化;
- 运行时依赖:使用
devm_phandle_domain_attach/clk_prepare_enable 等接口,确保时钟 / 电源 / 复位等依赖资源就绪后,再初始化驱动;
- 加载顺序:通过
initcall_level(如 module_init/late_initcall)调整驱动加载顺序,核心依赖先加载。
3. 如何调试 Linux 驱动问题?
(1) 内核日志调试
- 核心工具:
dmesg/cat /var/log/kern.log,驱动中用 dev_info/dev_err/pr_debug 打印日志;
- 动态调试:开启
CONFIG_DYNAMIC_DEBUG,通过 echo "file my_driver.c +p" > /sys/kernel/debug/dynamic_debug/control 打开调试日志。
(2) 硬件调试
- 示波器 / 逻辑分析仪:抓取总线时序(I2C/SPI/GPIO),排查电平异常、时序不匹配;
- 万用表:测量电源 / 引脚电平,排查短路、供电异常。
(3) 内核调试工具
- kgdb:内核远程调试,断点调试驱动代码;
- ftrace:跟踪函数调用(如 probe/remove)、中断执行时间;
- perf:分析驱动性能瓶颈(如 CPU 占用、函数耗时);
- sysfs/procfs:导出驱动状态(如
/sys/class/gpio//proc/interrupts),查看资源占用。掌握这些内核调试工具是深入理解操作系统原理的关键。
(4) 常见问题排查
- 匹配失败:检查设备树
compatible 与驱动 of_match_table 是否一致;
- probe 不执行:检查总线是否注册、设备是否存在、资源是否冲突;
- 数据传输失败:检查硬件时序、地址、校验位,打印传输数据缓冲区。
本文梳理了Linux驱动开发中几个核心子系统的关键知识点,对于系统性地理解操作系统的设备管理机制非常有帮助。如果你想深入探讨或获取更多嵌入式与内核开发资料,欢迎访问云栈社区与广大开发者交流。
 发表于 2025-12-31 04:40:15
|
查看: 237|
回复: 0
发表于 2025-12-31 04:40:15
|
查看: 237|
回复: 0
