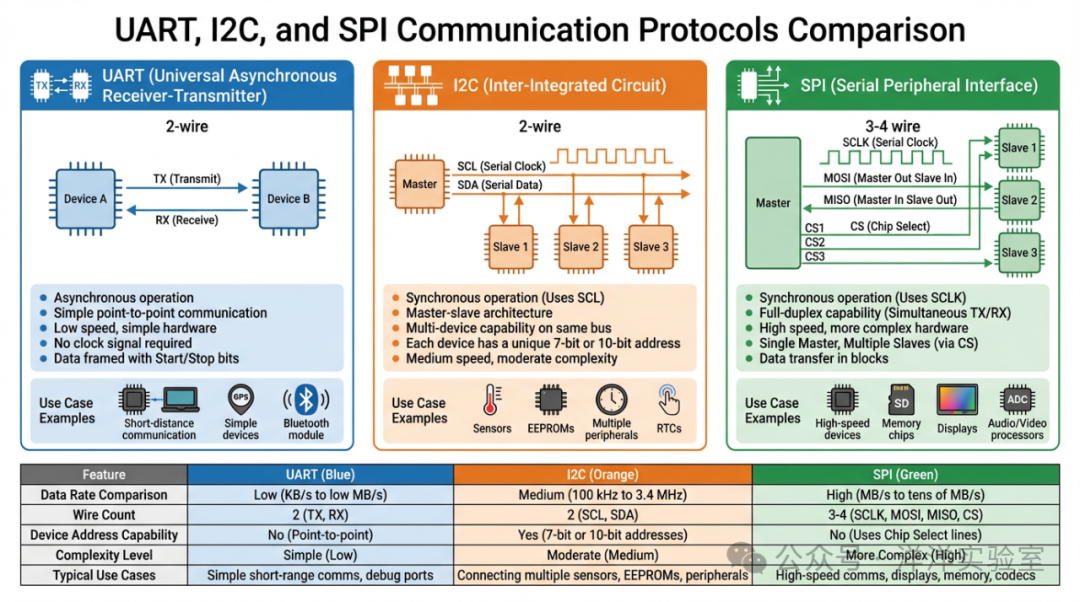
在嵌入式系统和硬件交互中,选择合适的通信协议至关重要。UART、I2C和SPI是最常见的三种串行通信协议,它们在硬件连接、通信方式和应用场景上各有特点。
1. UART (通用异步收发器)
UART是一种非常基础的异步串行通信协议。我们常听到的RS-232、RS-485等标准,其底层核心就是UART协议。它采用最简单的2线制通信,信号线分别为TX(发送)和RX(接收)。
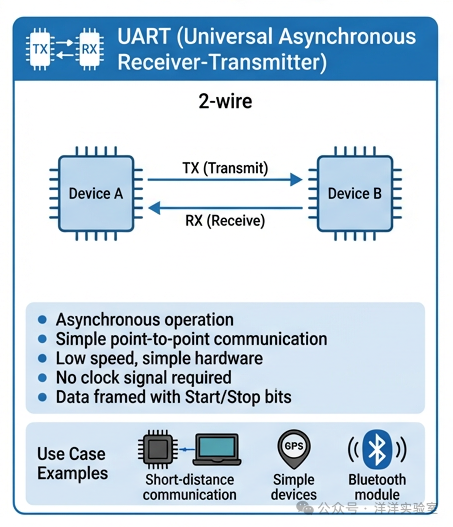
UART 核心特点:
- 异步通信:通信双方无需共享时钟信号,依靠事先约定好的波特率进行数据同步。
- 简单点对点:通常用于两个设备之间的直接通信。
- 低速、硬件简单:速率相对较低,硬件实现复杂度低。
- 应用场景:适用于短距离通信,如设备调试口、简单的传感器数据读取、蓝牙模块与主控的通信等。理解这类基础的计算机架构与通信原理,是深入硬件开发的基石。
2. I2C (内部集成电路)
I2C是一种同步、半双工的串行总线协议。它同样使用2根线进行通信,分别是SCL(串行时钟线)和SDA(串行数据线)。由于依赖时钟信号,它属于同步通信。
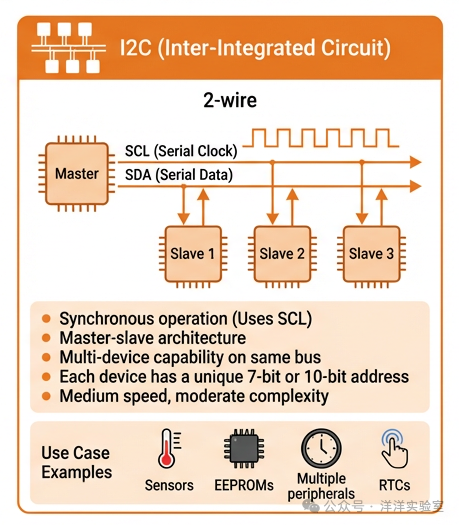
I2C 核心特点:
- 同步通信:由主设备提供时钟信号SCL,确保数据传输同步。
- 半双工:数据线SDA在同一时刻只能进行发送或接收。
- 主从架构 & 多设备支持:支持单个主设备控制多个具有唯一地址的从设备,共享同一条总线。
- 应用场景:广泛用于连接多个低速外设,如各种传感器(温湿度、加速度计)、EEPROM存储器、实时时钟(RTC)等。
3. SPI (串行外设接口)
SPI是一种高速、全双工的同步串行通信协议。为了达到更高的速率和灵活性,它通常需要3根或4根线,信号线分别为SCLK(串行时钟)、MOSI(主设备输出从设备输入)、MISO(主设备输入从设备输出)以及CS(片选信号,每个从设备独立一根)。
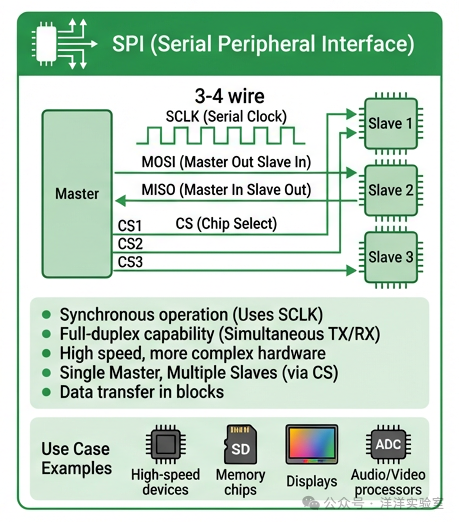
SPI 核心特点:
- 同步通信 & 全双工:在时钟驱动下,主从设备可以同时发送和接收数据,通信效率高。
- 高速率:常见速率范围在10Mbps到50Mbps甚至更高,远超前两者。
- 硬件相对复杂:需要更多的信号线,尤其是从设备较多时,片选线会占用大量IO口。
- 应用场景:适用于对速度要求高的设备,如闪存芯片、显示屏、音频编解码器以及高速ADC/DAC等。
总结与选择建议
| 特性 |
UART |
I2C |
SPI |
| 通信方式 |
异步 |
同步 |
同步 |
| 双工模式 |
全双工 |
半双工 |
全双工 |
| 线数 |
2 (TX, RX) |
2 (SCL, SDA) |
3-4 (SCLK, MOSI, MISO, CS…) |
| 拓扑结构 |
点对点 |
多主多从(总线) |
一主多从(星型) |
| 寻址方式 |
无(点对点) |
软件地址(7/10位) |
硬件片选(CS线) |
| 速度 |
低 |
中 |
高 |
| 复杂度 |
低 |
中 |
高 |
如何选择?
- 追求简单和成本:两个设备间简单通信,选UART。
- 连接多个低速外设:需要节省IO口,设备数量适中,选I2C。
- 要求高速数据传输:对实时性、带宽要求高,如驱动显示或读写大容量存储,选SPI。
在实际的嵌入式项目设计中,根据具体的外设需求、硬件资源(IO数量)和性能要求来权衡选择,是每一位嵌入式工程师的必备技能。 |  发表于 2026-1-10 12:25:09
|
查看: 190|
回复: 0
发表于 2026-1-10 12:25:09
|
查看: 190|
回复: 0
