使用汇川SV630N伺服驱动器进行 EtherCAT 通讯时,必须严格遵循基于 CoE (CANopen over EtherCAT) 协议规范的状态机流程,才能引导伺服驱动器进入并运行在指定工作状态。其核心状态机切换流程如下图所示:
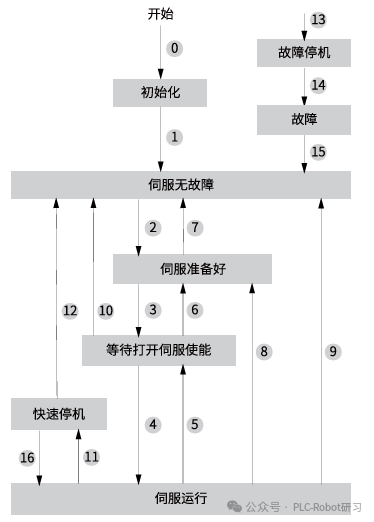
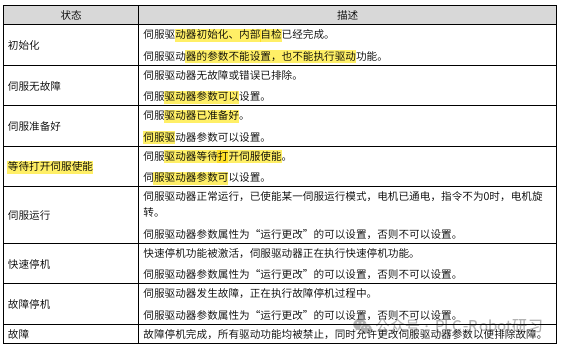
图中各状态的详细描述如下表所示:
EtherCAT 状态机与通讯初始化
在 EtherCAT 网络层面,设备必须支持并协调主站与从站应用的四种基本状态,其转换关系如下图所示:
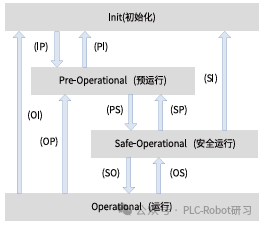
这四种状态分别是:
- Init: 初始化状态,简写为
I。
- Pre-Operational: 预运行状态,简写为
P。
- Safe-Operational: 安全运行状态,简写为
S。
- Operational: 运行状态,简写为
O。
从初始状态向运行状态升级时,必须严格按照 初始化 (I) → 预运行 (P) → 安全运行 (S) → 运行 (O) 的顺序进行,不可越级。但从运行状态返回则可以越级跳转。不同状态下,服务数据对象 (SDO) 和过程数据对象 (PDO) 的可用性以及状态转换的初始化操作如下表所示:

分布式时钟配置
分布式时钟 (Distributed Clock, DC) 机制能使网络中所有 EtherCAT 设备基于同一系统时间运行,从而实现各设备任务的精确同步。从站设备可以依据此同步时间产生同步信号。在 SV630N 系列伺服驱动器中,仅支持 DC 同步模式,同步周期由 SYNC0 信号控制。
在配置软件中设定分布式时钟的原因,正是为了启用和配置这一关键同步功能,典型的配置界面如下:

驱动器状态指示灯解读
在使用 SV630N 系列伺服驱动器时,正常运行时我们常看到驱动器数码管显示类似 -88rn 的代码。这些字符具体代表什么含义呢?
首先,我们来看一下驱动器的外观:

下图清晰地解释了数码管各个位置所代表的含义:
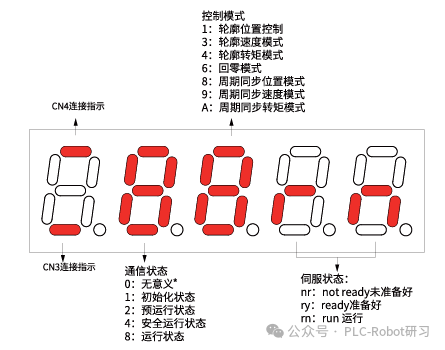
简单来说,-88 通常表示无故障或准备好状态,而 rn 表示驱动器正处于运行 (run) 状态。如果此处显示 0,则可能表示对象字典索引 0x6060(控制模式选择)未写入有效值或被写入了 0,亦或是参数 H02.00 被设置为 0、1 或 2。理解这套编码规则后,我们就能解读驱动器在各种状态下的显示信息了。
硬件连接与拓扑结构
通讯接口定义
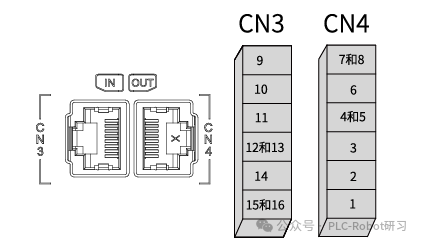
SV630N 的 EtherCAT 通讯通过 CN3 和 CN4 端子进行,分别作为总线通讯的输入和输出端口。

接口端子的引脚排布如下图所示:
各引脚的具体定义如下表所示:
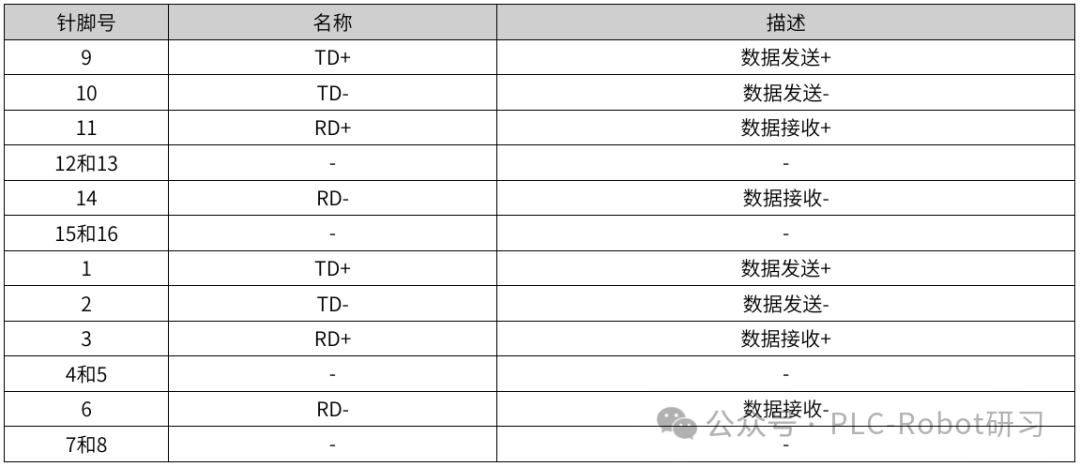
注意:上表针脚定义适用于 Size A 和 Size B 型号,其他型号请参考对应手册。
在实际布线连接时,应将上一站的输出接到本站的 CN3 (IN) 接口,本站的 CN4 (OUT) 接口则连接到下一台从站设备。
网络拓扑方式
EtherCAT 通讯的拓扑结构非常灵活,常用的包括线性连接、星型连接和树形连接等。
- 线性连接: 也可称为串联,将主站和从站设备依次链接。
- 优点: 实现简单,无需额外硬件,成本低。
- 缺点: 受单段网线长度限制(如超五类线约100米),扩展性有限。主线故障会导致后续所有站点通讯中断。
- 适用场景: 设备呈直线布局的场合。
- 星型连接: 通过一个中心耦合器或交换机连接主站与多个从站。
- 优点: 支持更大网络规模,易于扩展维护,单点故障不影响其他节点。
- 缺点: 需要额外硬件,成本较高;中心节点故障会导致整个网络瘫痪。
- 适用场景: 小型系统或对可靠性要求高的场合。
- 树形连接: 结构类似树状,从根节点分出多个分支。
- 优点: 扩展性强,可以覆盖更广的范围。
- 缺点: 根节点故障将导致其下所有分支网络中断。
- 适用场景: 需要复杂扩展的网络结构。
合理选择和配置网络拓扑,是构建稳定、高效工业控制系统的关键一步。想了解更多关于工业网络与通信协议的深度内容,欢迎访问 云栈社区 进行交流探讨。 |  发表于 2026-1-17 04:55:41
|
查看: 385|
回复: 0
发表于 2026-1-17 04:55:41
|
查看: 385|
回复: 0
