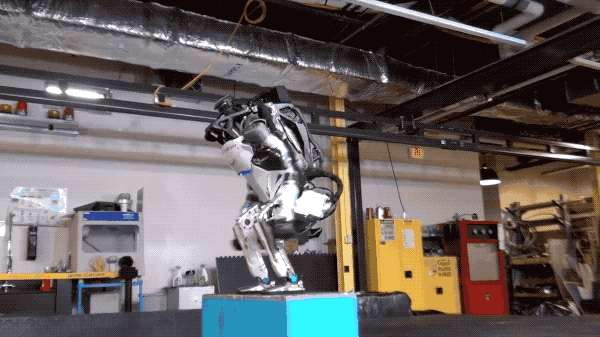
如今,众多科技公司已经成功研制出性能卓越的机器人产品,例如谷歌的“大狗”、能够完成高难度后空翻的机器人,以及波士顿动力知名的“Spot”。
这些机器人的动作敏捷流畅,常常被网友们称赞“帅爆了!”
虽然实现这些复杂动作的控制技术非常深奥,但其背后的机械原理却相对基础。它们的运动核心,大多都源于一些经典的连杆机构。

所谓连杆机构,是指由若干定长的杆件(线段)通过铰链(顶点重合)连接而成的可动结构。下面我们就来盘点几种在机器人设计中常用的核心连杆机构。
1. 平行四杆机构
这是一种结构简单、成本低廉且传动可靠的机构。它属于铰链四杆机构的一种特殊形式,其构件构成一个平行四边形,能够稳定地进行水平移送运动。
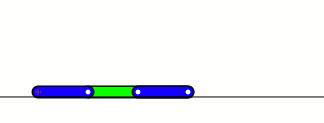
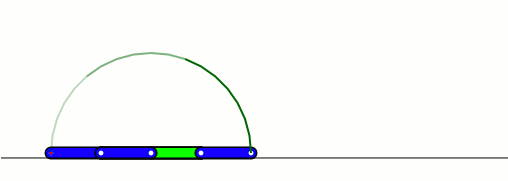
看这连续的运动,最后是不是快变成轮子的感觉了?
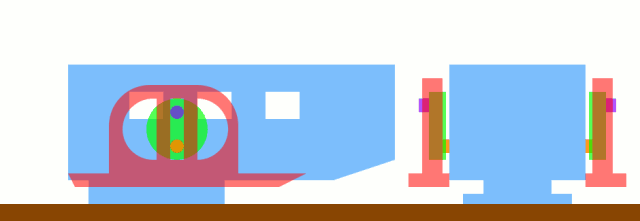
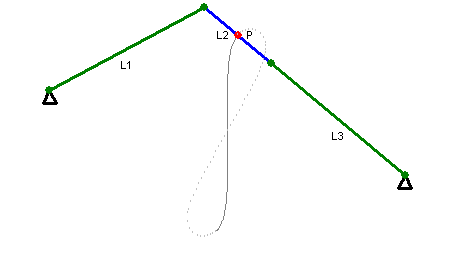
2. 切比雪夫连杆机构
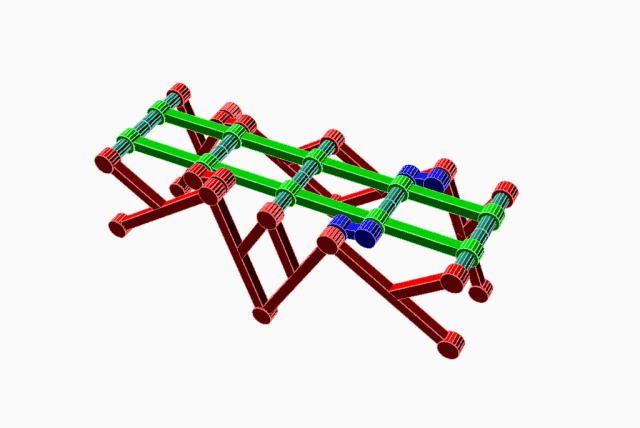
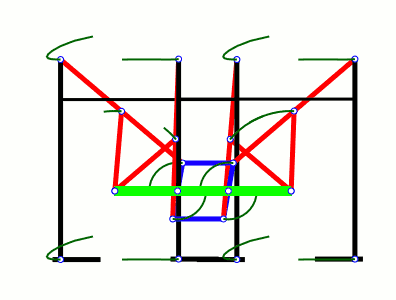
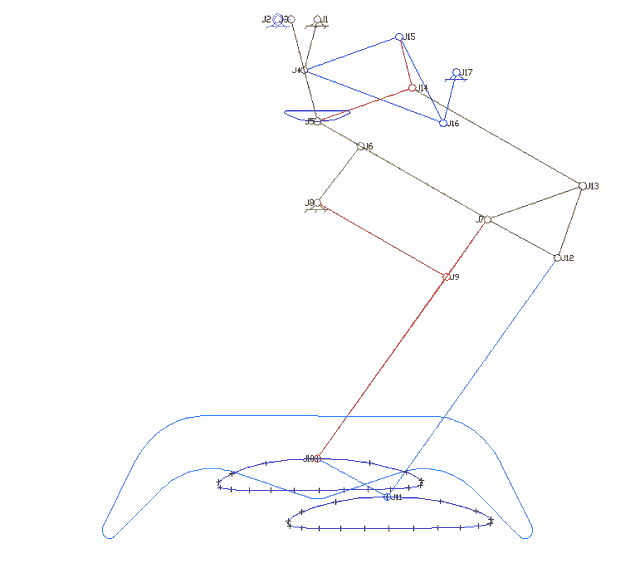
如下图所示,由静止节、原动节、从动节、中间节和延长中间节组成的四杆机构,就是经典的切比雪夫连杆机构。它可以模拟出机器人腿部抬腿、迈步、蹬地、前行的周期性动作。图中其余未标注的杆件与部分切比雪夫连杆共同构成了平行四边形机构,用以在运动过程中保持机器人脚面始终与地面平行。这种机构能实现平滑的行走轨迹,效率很高。
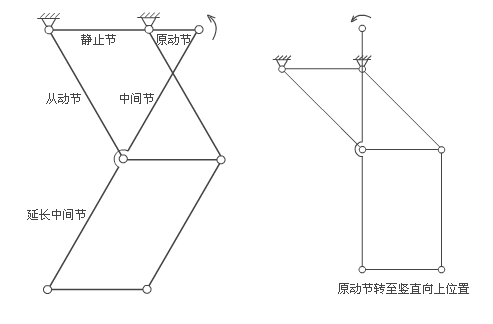
因此,它经常被用于模拟机器人的行走步态。

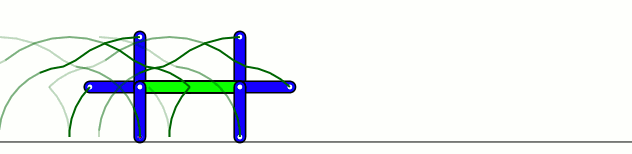
这个步态够优美吧?迈着小碎步就走出来了。
这个机构竟然也是由切比雪夫连杆组成的?我怎么没看出来。等等,它倒立着就出来了!不过倒立着的运动姿态好像也别有一番美感。
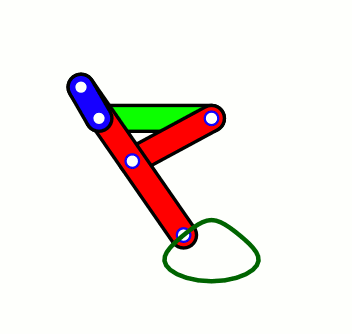
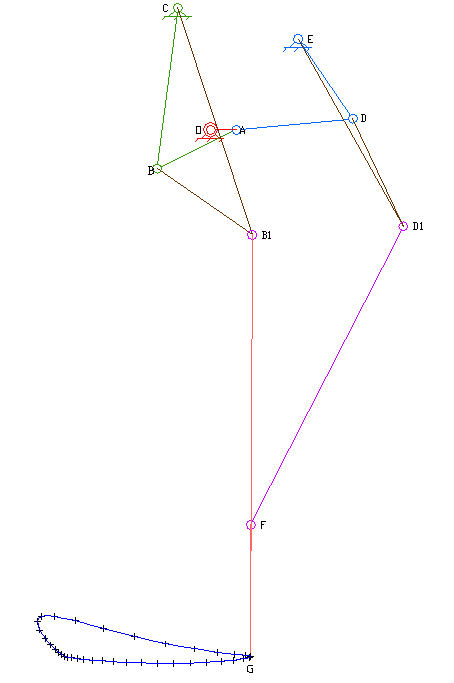
3. 克兰连杆机构
单个克兰连杆的运动形态是这样的。
你这步子迈得似乎不如切比雪夫优美啊,不过它确实是克兰连杆。

没看错吧,横着就出来了!看来以上展示的多是模拟四足步态的机构。综合比较,感觉还是切比雪夫连杆的步态最优雅!
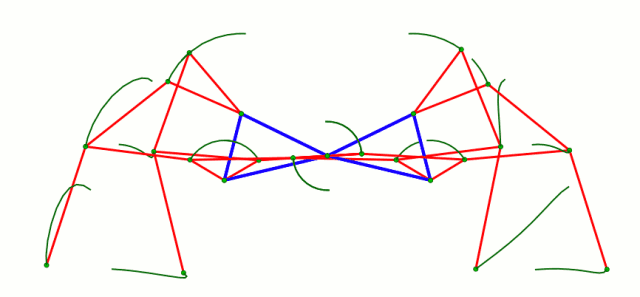
4. Jansen 连杆机构
这种机构由 Theo Jansen 发明,专门用于模拟平稳的行走步态。Jansen 利用这种连杆制造了著名的“海滩巨兽”风力步行雕塑。Jansen连杆兼具美学价值与技术优势,仅通过一个简单的旋转输入,就能逼真地模仿生物的行走运动。它已被广泛应用于行走机器人和步态分析领域,甚至可以制造出如电动蜘蛛般巨大的运动机械。
单个Jansen连杆机构的运动是这样的。
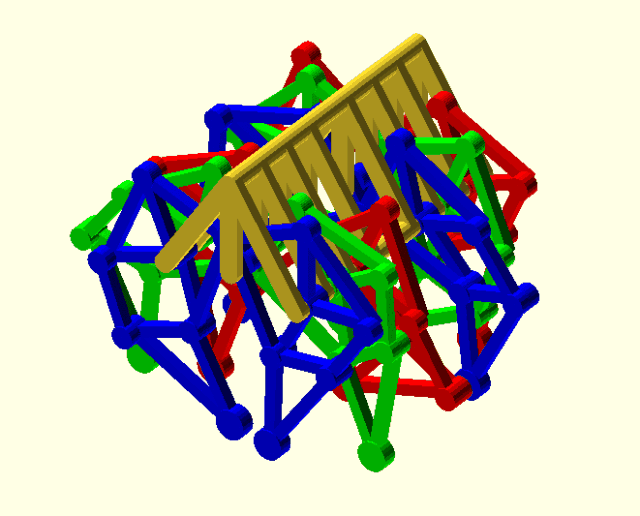
太震撼了,这个结构模拟出了12只脚的运动!看得人眼花缭乱,需要静一静。
5. 波塞利连杆机构
波塞利连杆是历史上第一个真正意义上将旋转运动转化为绝对直线运动的平面连杆机构。有趣的是,运用初中数学的知识就能证明其末端点的运动轨迹是一条直线。
6. 瓦特连杆
瓦特连杆主要用于实现近似的直线运动,常见于汽车底盘悬挂系统。它是由改良了蒸汽机的著名工程师詹姆斯·瓦特发明的。在瓦特连杆中,移动的中点自由度受到约束,从而被迫做出近似直线的运动。它最早被用于瓦特蒸汽机,后来也成为了汽车悬架中的关键结构。
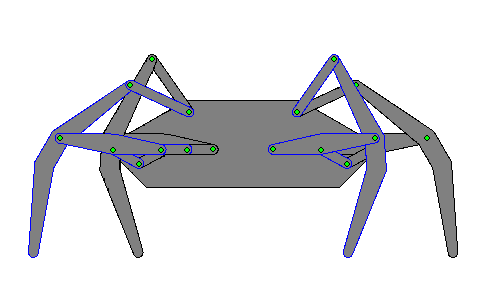
7. 其他模仿行走的机构
这个结构看起来有点复杂!
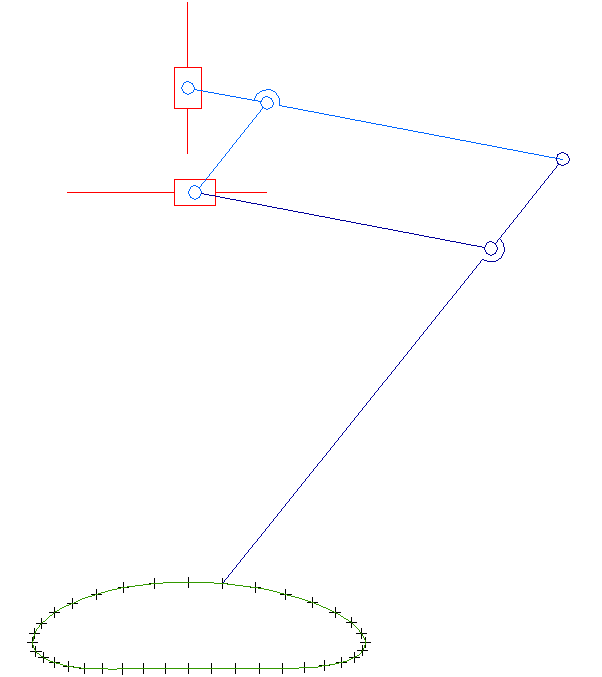
这个“大长腿”机构有点特别,它的输入竟然不是旋转运动,而是直接用直线运动进行控制的。
从简单的平行四杆到复杂的Jansen连杆,这些精妙的机械结构构成了机器人灵活运动的基石。希望通过本文的梳理,能帮助你更直观地理解机器人运动背后的机械奥秘。如果你想深入探讨更多关于机械设计或机器人技术的话题,欢迎来云栈社区交流分享。 |  发表于 2026-1-26 14:09:47
|
查看: 176|
回复: 0
发表于 2026-1-26 14:09:47
|
查看: 176|
回复: 0
