本文聚焦于OpenBMC项目中至关重要的D-Bus进程间通信机制,对其设计原理、优势与局限性进行探讨。
一、OpenBMC项目概述
OpenBMC是一个面向数据中心基础设施管理的开源BMC软件栈。它作为现代服务器管理的核心实现,承担着对服务器硬件状态的远程监控、电源控制、系统配置等关键任务。相较于传统的闭源BMC固件,OpenBMC采用的模块化架构和开源协作模式,显著提升了系统的可扩展性与可维护性。
二、采用D-Bus通信机制的原因
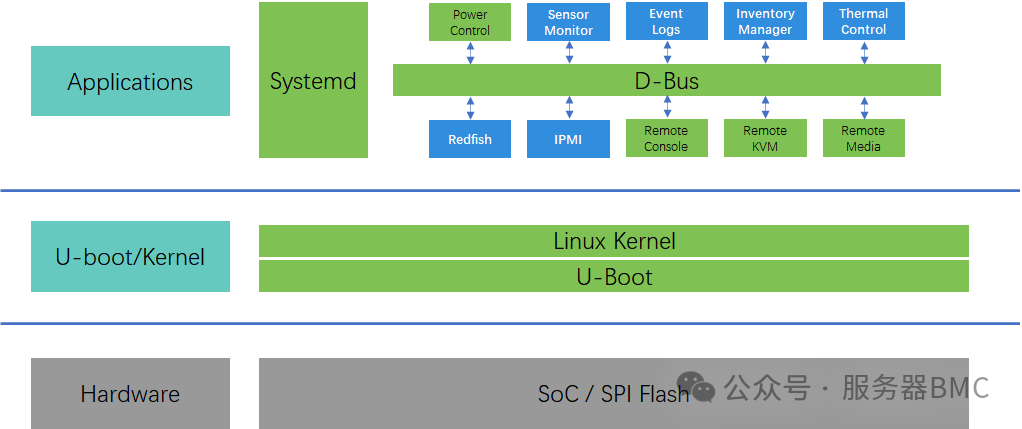
OpenBMC采用典型的三层架构设计,而dbus-interfaces正是位于核心中间件层的标准化接口定义。
- 应用层:提供用户交互界面与管理工具,例如WebUI、CLI以及
BMCWeb。
- 中间件层:实现核心服务框架,主要包括:
dbus-interfaces:定义标准化的D-Bus接口。state-manager:负责状态机管理。entity-manager:负责硬件配置管理。
- 硬件抽象层:提供底层硬件驱动支持,如
libgpiod、phosphor-i2c等。
从架构可以看出,D-Bus作为一种轻量级的进程间通信机制,在OpenBMC生态中扮演着承上启下的关键角色,具备以下主要特点:
- 基于消息总线的发布-订阅机制。
- 面向对象的接口设计(对象路径、接口、方法、信号、属性)。
- 类型安全的通信协议(通过 introspection 数据进行验证)。
- 支持通过SELinux和Polkit进行细粒度权限控制。
三、采用D-Bus总线机制的优劣势
在OpenBMC中使用D-Bus带来了多方面的优势:
- 标准化与解耦:D-Bus提供了标准化的消息总线系统,使得OpenBMC能够将不同功能模块解耦。各模块无需知晓彼此的具体实现细节,仅需通过定义好的D-Bus接口进行交互。这使得硬件驱动、中间件服务和Web应用可以由不同团队并行开发,只需遵循统一的接口规范即可。
- 类型安全与可发现性:D-Bus提供类型安全的数据结构,支持复杂数据类型的序列化。它还允许传递文件描述符、实现凭据认证,并支持服务的自动激活(按需启动),这类似于一种动态配置与热插拔能力。
- 事件驱动能力:通过信号(Signals)机制,系统可以在状态发生变化时(如主机电源状态改变)自动通知所有相关的上层应用服务,从而提升系统的响应效率和实时性。
- 成熟稳定且生态完善:D-Bus守护进程设计为轻量级且持续稳定运行。它集成了如
busctl等强大的监控诊断工具,使系统管理员能够实时查看总线上的对象、接口、属性和方法调用,极大地方便了系统调试与运维。
然而,D-Bus总线也存在一些固有的技术劣势:
- 性能开销较大:D-Bus在用户空间实现,每次方法调用都涉及多次消息拷贝、验证和上下文切换,其延迟远高于直接的函数调用。对于需要高频数据采集的场景(如毫秒级传感器采样),D-Bus可能成为性能瓶颈。
- 启动时序依赖:由于D-Bus系统守护进程必须在其他依赖它的服务之前启动,在系统引导初期,基于D-Bus的通信可能无法使用,这可能影响早期的硬件初始化流程。此外,服务激活时也可能存在竞态条件,需要仔细处理服务间的启动顺序。
- 不适合大数据传输:D-Bus的设计初衷是面向控制平面的通信,而非数据平面。它不适合传输大量数据(如完整的日志文件或固件镜像),因为协议本身的开销会显著降低传输效率。因此,OpenBMC通常需要为大块数据传输设计专用通道。
本文由云栈社区分享,更多服务器基础设施与系统管理技术,欢迎交流探讨。 |  发表于 2026-1-21 08:48:06
|
查看: 221|
回复: 0
发表于 2026-1-21 08:48:06
|
查看: 221|
回复: 0
