长期以来,高性能计算(HPC)和GPU编程似乎是C++开发者的专属领地。Go语言虽然在并发和服务端开发上表现卓越,但在触及GPU算力时,往往显得力不从心。
然而,在最近的GopherCon 2025上,软件架构师Sam Burns打破了这一刻板印象。他展示了如何通过Go和CUDA的结合,让Gopher也能轻松驾驭GPU的海量核心,实现惊人的并行计算能力。
本文将带你深入这场演讲的核心,从GPU的独特架构到内存模型,再通过一个完整的、可运行的矩阵乘法示例,手把手教你如何用Go驱动NVIDIA显卡释放澎湃算力。
为什么 Go 开发者需要关注 GPU?
在摩尔定律逐渐失效的今天,CPU的单核性能提升已遇瓶颈。虽然CPU拥有极低的延迟、卓越的分支预测能力和巨大的缓存,但它的核心数量(通常在几十个量级)限制了其处理大规模并行任务的能力。
相比之下,GPU (Graphics Processing Unit) 走的另一条路。它拥有成千上万个核心。虽然单个GPU核心的频率较低,且缺乏复杂的逻辑控制能力,但它们能同时处理海量简单的计算任务。这使得GPU成为以下场景的绝佳选择:
- 图形处理与视频转码
- AI模型推理与训练(神经网络本质上就是大规模矩阵运算)
- 物理模拟与科学计算(如流体力学、分子动力学)
- 密码学与哈希碰撞
通过Go语言集成CUDA,我们可以在享受Go语言高效开发体验(构建API、微服务、调度逻辑)的同时,将最繁重的“脏活累活”卸载给GPU,实现CPU负责逻辑,GPU负责算力的完美分工。
GPU架构与CUDA编程模型速览——理解 GPU 的“兵团”
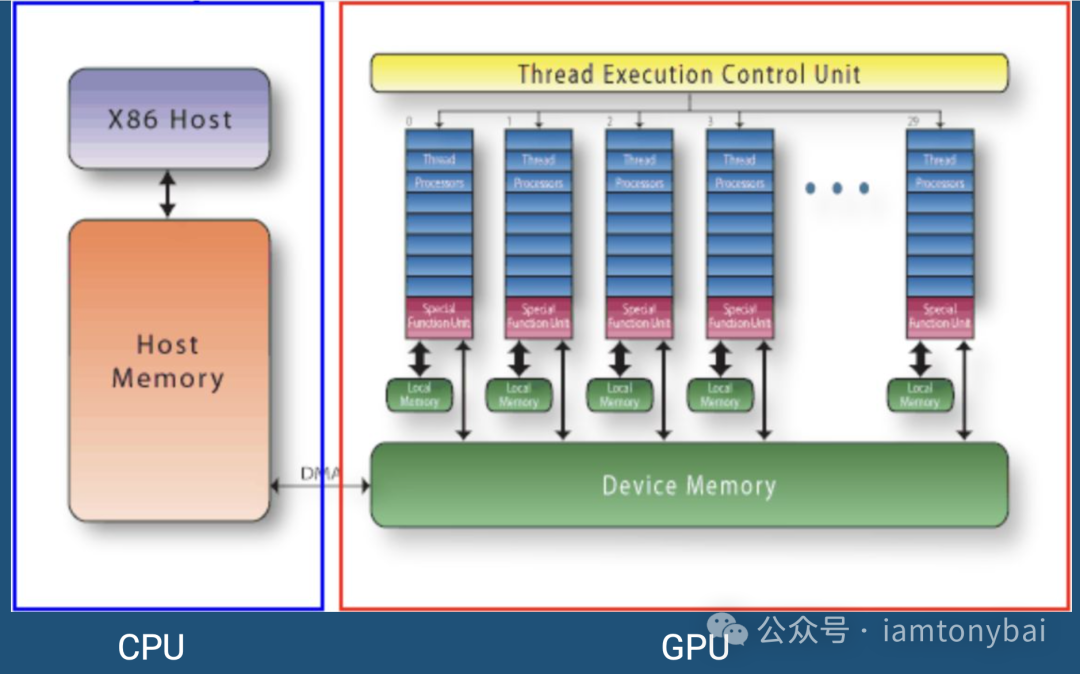
在编写代码之前,我们需要理解GPU的独特架构。Sam Burns用一个形象的比喻描述了GPU的线程模型。如果说CPU是几位精通各种技能的“专家”,那么GPU就是一支纪律严明、规模庞大的“兵团”。
而指挥这支兵团的指令集,我们称之为“内核”(Kernel)。
0. 什么是 Kernel?
此Kernel非彼Kernel(操作系统内核)。在CUDA语境下,Kernel是一个运行在GPU上的函数。
当我们“启动”一个Kernel时,GPU并不是简单地调用这个函数一次,而是同时启动成千上万个线程,每个线程都在独立执行这份相同的代码逻辑。每个线程通过读取自己独一无二的ID(threadIdx),来决定自己该处理数据的哪一部分(比如图像的哪个像素,或矩阵的哪一行)。
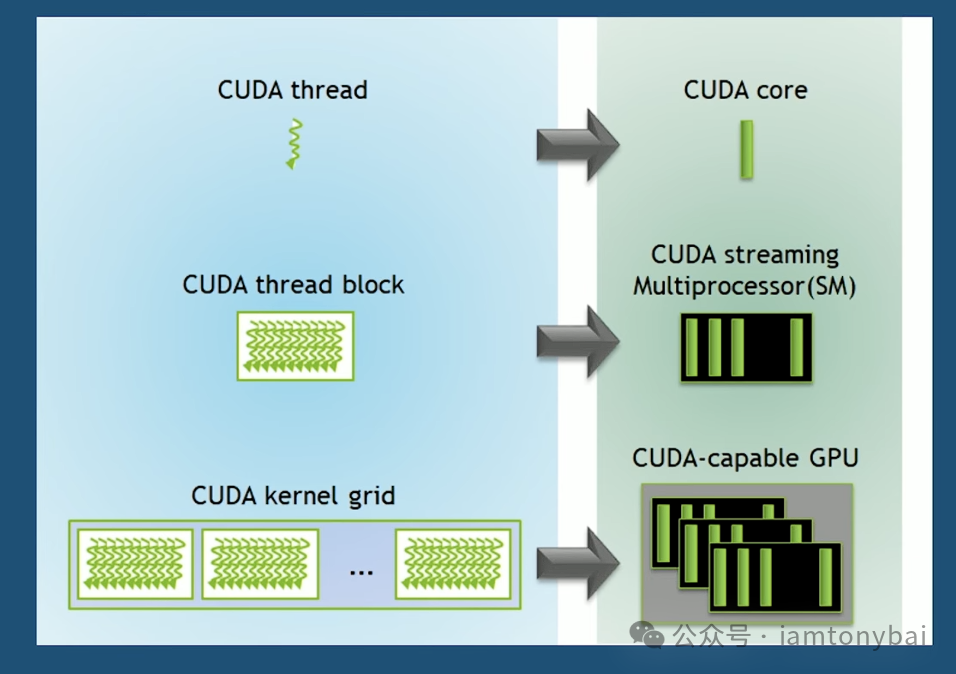
1. 线程模型:从 Thread 到 Grid
理解了Kernel,我们再看它是如何被调度执行的。CUDA编程模型将计算任务分解为三个层级:
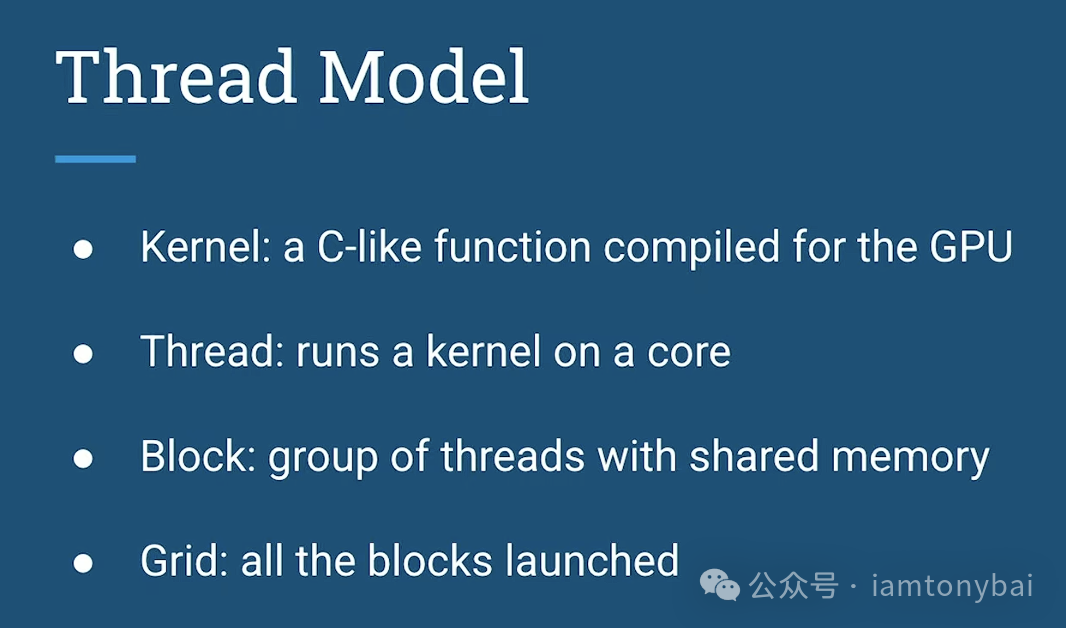
- 线程 (Thread):GPU工作的最小单位。它类似于CPU的线程但极其轻量。每个线程都有自己的ID,负责处理数据的一小部分(例如图像中的一个像素,或矩阵中的一个元素)。
- 块 (Block):一组线程的集合。一个Block内的线程运行在同一个流式多处理器(SM)上。关键点在于:同一个Block内的线程可以通过极快的“共享内存”进行协作和同步(
__syncthreads())。
- 网格 (Grid):所有执行同一个内核函数(Kernel)的Block的集合。Grid涵盖了整个计算任务。
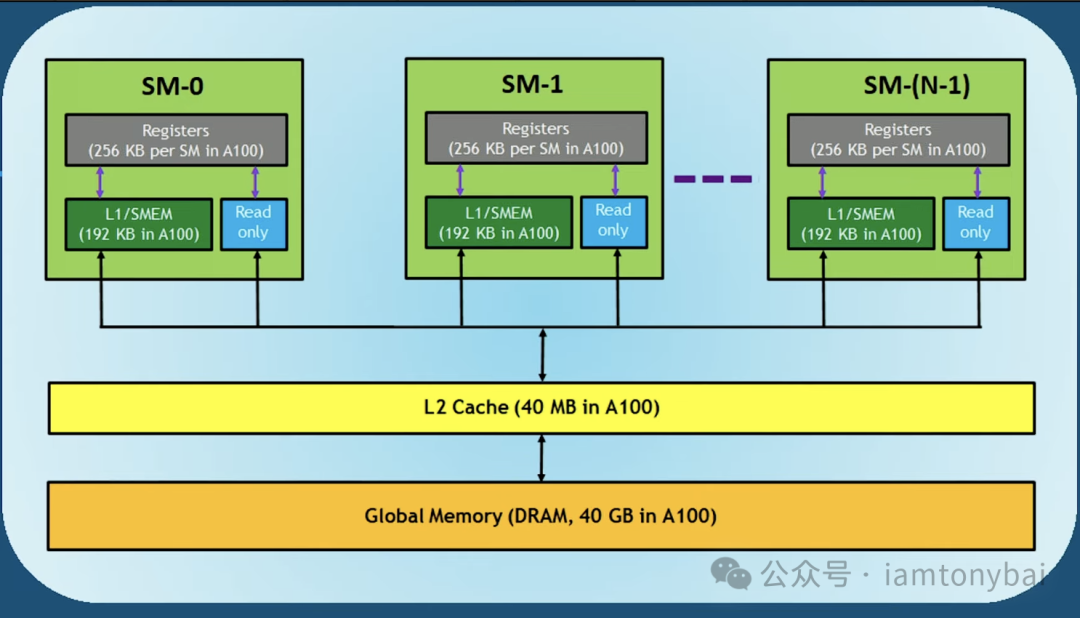
2. 内存模型:速度与容量的权衡
GPU的内存架构比CPU更复杂,理解它对于性能优化至关重要:
- 寄存器 (Registers):最快。每个线程私有,用于存储局部变量。数量有限,用多了会溢出到慢速内存。
- 共享内存 (Shared Memory):极快(L1缓存级别)。属于Block私有,是线程间通信的桥梁。优化CUDA程序的核心往往在于如何高效利用共享内存来减少全局内存访问。
- 全局内存 (Global Memory):较慢(显存,如24GB GDDR6X)。所有线程可见,容量大但延迟高。
- 常量内存 (Constant Memory):快(有缓存)。用于存储只读参数,适合广播给所有线程。
编写高效CUDA代码的秘诀,就是尽可能让数据停留在寄存器和共享内存中,减少对全局内存的访问。
Go + CUDA 实战——跨越鸿沟
理解了原理,现在让我们动。我们将构建一个完整的Go项目,利用GPU并行计算两个矩阵的乘积。这个过程需要借助CGO作为桥梁。
1. 项目目录结构
go-cuda-cgo-demo/
├── main.go # Go 主程序 (CGO 入口,负责内存分配和调度)
├── matrix.cu # CUDA 内核代码 (在 GPU 上运行的 C++ 代码)
└── matrix.h # C 头文件 (声明导出函数,供 CGO 识别)
2. 编写 CUDA 内核 (matrix.cu)
这是在GPU上运行的核心代码。我们定义一个matrixMulKernel,每个线程利用自己的坐标(x, y)计算结果矩阵中的一个元素。
```c++
// matrix.cu
include<cuda_runtime.h>
include<stdio.h>
// CUDA Kernel: 每个线程计算 C[row][col] 的值
global void matrixMulKernel(float a, float b, float c, int width) {
// 根据 Block ID 和 Thread ID 计算当前线程的全局坐标
int row = blockIdx.y blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row < width && col < width) {
float sum = 0;
// 计算点积
for (int k = 0; k < width; k++) {
sum += a[row * width + k] * b[k * width + col];
}
c[row * width + col] = sum;
}
}
extern "C" {
// 供 Go 调用的 C 包装函数
// 负责显存分配、数据拷贝和内核启动
void runMatrixMul(float h_a, float h_b, float h_c, int width) {
int size = width width sizeof(float);
float d_a, d_b, d_c;
// 1. 分配 GPU 显存 (Device Memory)
cudaMalloc((void **)&d_a, size);
cudaMalloc((void **)&d_b, size);
cudaMalloc((void **)&d_c, size);
// 2. 将数据从 Host (CPU内存) 复制到 Device (GPU显存)
// 这一步通常是性能瓶颈,应尽量减少
cudaMemcpy(d_a, h_a, size, cudaMemcpyHostToDevice);
cudaMemcpy(d_b, h_b, size, cudaMemcpyHostToDevice);
// 3. 定义 Grid 和 Block 维度
// 每个 Block 包含 16x16 = 256 个线程
dim3 threadsPerBlock(16, 16);
// Grid 包含足够多的 Block 以覆盖整个矩阵
dim3 numBlocks((width + threadsPerBlock.x - 1) / threadsPerBlock.x,
(width + threadsPerBlock.y - 1) / threadsPerBlock.y);
// 4. 启动内核!成千上万个线程开始并行计算
matrixMulKernel<<<numBlocks, threadsPerBlock>>>(d_a, d_b, d_c, width);
// 5. 将计算结果从 Device 传回 Host
cudaMemcpy(h_c, d_c, size, cudaMemcpyDeviceToHost);
// 6. 释放 GPU 内存
cudaFree(d_a);
cudaFree(d_b);
cudaFree(d_c);
}
}
### 3. 定义 C 头文件 (`matrix.h`)
```c
// matrix.h
#ifndef MATRIX_H
#define MATRIX_H
void runMatrixMul(float *a, float *b, float *c, int width);
#endif
4. 编写 Go 主程序 (main.go)
在Go代码中,我们准备数据,并通过CGO调用runMatrixMul。
// go-cuda-cgo-demo/main.go
package main
/*
#cgo LDFLAGS: -L. -lmatrix -L/usr/local/cuda/lib64 -lcudart
#include "matrix.h"
*/
import "C"
import (
"fmt"
"math/rand"
"time"
"unsafe"
)
const width = 1024 // 矩阵大小 1024x1024,共 100万次计算
func main() {
size := width * width
h_a := make([]float32, size)
h_b := make([]float32, size)
h_c := make([]float32, size)
// 初始化矩阵数据
rand.Seed(time.Now().UnixNano())
for i := 0; i < size; i++ {
h_a[i] = rand.Float32()
h_b[i] = rand.Float32()
}
fmt.Printf("Starting Matrix Multiplication (%dx%d) on GPU...\n", width, width)
start := time.Now()
// 调用 CUDA 函数
// 使用 unsafe.Pointer 获取切片的底层数组指针,传递给 C
C.runMatrixMul(
(*C.float)(unsafe.Pointer(&h_a[0])),
(*C.float)(unsafe.Pointer(&h_b[0])),
(*C.float)(unsafe.Pointer(&h_c[0])),
C.int(width),
)
// 注意:在更复杂的场景中,需要使用 runtime.KeepAlive(h_a)
// 来确保 Go GC 不会在 CGO 调用期间回收切片内存。
elapsed := time.Since(start)
fmt.Printf("Done. Time elapsed: %v\n", elapsed)
// 简单验证:检查左上角元素
fmt.Printf("Result[0][0] = %f\n", h_c[0])
}
5. 编译与运行
前提:确保你的机器安装了 NVIDIA Driver 和 CUDA Toolkit。nvcc是CUDA编译器工具链,可以将基于CUDA的代码翻译为GPU机器码。
步骤一:编译 CUDA 代码
nvcc -c matrix.cu -o matrix.o
ar rcs libmatrix.a matrix.o
步骤二:编译 Go 程序
# 链接本地的 libmatrix.a 和系统的 CUDA 运行时库
go build -o gpu-cgo-demo main.go
步骤三:运行
./gpu-cgo-demo
预期输出:
Starting Matrix Multiplication (1024x1024) on GPU...
Done. Time elapsed: 611.815451ms
Result[0][0] = 262.440918
性能优化——从能用到极致
代码跑通只是第一步。Sam 推荐使用 NVIDIA 的Nsight Systems(nsys) 来进行性能分析。你会发现,虽然 GPU 计算极快,但PCIe 总线的数据传输往往是最大的瓶颈。
优化黄金法则:
- 减少传输:PCIe很慢。尽量一次性将所有数据传给GPU,让其进行多次计算,最后再取回结果。
- 利用共享内存(Shared Memory):Block内的共享内存比全局显存快得多。在矩阵乘法中,可以利用它实现分块算法(Tiling),将小块矩阵加载到共享内存中复用,从而大幅减少显存带宽压力。这需要对计算机基础中的内存访问模式有深刻理解。
小结:Gopher 的新武器
Go + CUDA的组合,为Go语言打开了一扇通往高性能计算的大门。它证明了Go不仅是编写微服务的利器,同样可以成为驾驭底层硬件、构建计算密集型应用的强大工具。如果你正在处理大规模数据,不妨尝试将计算任务卸载给GPU,你会发现,那个熟悉的蓝色Gopher,也能拥有令人惊叹的爆发力。
资料链接:
本文涉及的示例源码可以在这里(https://github.com/bigwhite/experiments/tree/master/go-gpu)下载。
附录:告别 CGO?尝试 PureGo 的无缝集成
虽然CGO是连接Go和C/C++的标准桥梁,但它也带来了编译速度变慢、工具链依赖等问题。有没有一种更“纯粹”的Go方式?
答案是有的。借助PureGo库,我们可以在不开启CGO的情况下,直接加载动态链接库(.so/.dll)并调用其中的符号。
让我们看看如何用PureGo重写上面的main.go。
1. 准备动态库
首先,我们需要将CUDA代码编译为共享对象(.so),而不是静态库。
# 编译为共享库 libmatrix.so
nvcc -shared -Xcompiler -fPIC matrix.cu -o libmatrix.so
2. 编写 PureGo 版主程序 (go-cuda-purego-demo/main.go)
// go-cuda-purego-demo/main.go
package main
import (
"fmt"
"math/rand"
"runtime"
"time"
"github.com/ebitengine/purego"
)
const width = 1024
func main() {
// 1. 加载动态库
// 注意:在运行时,libmatrix.so 和 libcuder.so 必须在 LD_LIBRARY_PATH 中
libMatrix, err := purego.Dlopen("libmatrix.so", purego.RTLD_NOW|purego.RTLD_GLOBAL)
if err != nil {
panic(err)
}
// 还需要加载 CUDA 运行时库,因为 libmatrix 依赖它
_, err = purego.Dlopen("/usr/local/cuda/lib64/libcudart.so", purego.RTLD_NOW|purego.RTLD_GLOBAL)
if err != nil {
panic(err)
}
// 2. 注册 C 函数符号
var runMatrixMul func(a, b, c *float32, w int)
purego.RegisterLibFunc(&runMatrixMul, libMatrix, "runMatrixMul")
// 3. 准备数据 (与 CGO 版本相同)
size := width * width
h_a := make([]float32, size)
h_b := make([]float32, size)
h_c := make([]float32, size)
rand.Seed(time.Now().UnixNano())
for i := 0; i < size; i++ {
h_a[i] = rand.Float32()
h_b[i] = rand.Float32()
}
fmt.Println("Starting Matrix Multiplication via PureGo...")
start := time.Now()
// 4. 直接调用!无需 CGO 类型转换
runMatrixMul(&h_a[0], &h_b[0], &h_c[0], width)
// 5. 极其重要:保持内存存活
// PureGo 调用是纯汇编实现,Go GC 无法感知堆栈上的指针引用
// 必须显式保活,否则在计算期间 h_a 等可能被 GC 回收!
runtime.KeepAlive(h_a)
runtime.KeepAlive(h_b)
runtime.KeepAlive(h_c)
fmt.Printf("Done. Time: %v\n", time.Since(start))
fmt.Printf("Result[0][0] = %f\n", h_c[0])
}
3. 运行
# 无需 CGO,直接在go-cuda-purego-demo下运行
# 确保当前目录在 LD_LIBRARY_PATH 中
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:.
CGO_ENABLED=0 go run main.go
Starting Matrix Multiplication via PureGo...
Done. Time: 584.397195ms
Result[0][0] = 260.088806
优势:
- 编译飞快:没有CGO的编译开销。
- 零外部依赖:编译环境不需要安装GCC或CUDA Toolkit,只要运行时环境有
.so即可。这对于在轻量级CI/CD环境中构建分发包非常有用。
注意:PureGo方案虽然优雅,但也失去了CGO的部分类型安全检查,且需要开发者更小心地管理内存生命周期(runtime.KeepAlive)。
 发表于 2026-1-22 07:48:38
|
查看: 306|
回复: 0
发表于 2026-1-22 07:48:38
|
查看: 306|
回复: 0
