在嵌入式系统开发中,日志系统是调试和问题定位不可或缺的工具。一个设计良好的日志模块能帮助我们快速定位异常、分析程序流。本文将介绍一个专为资源受限环境设计的简易嵌入式日志系统的完整实现思路,包含同步/异步模式、环形缓冲区、多级别过滤等核心功能,并基于 FreeRTOS 进行平台适配。
1. 简易嵌入式日志系统
1.1 日志系统测试
1.1.1 同步 vs 异步输出
我们首先通过一个对比任务来直观感受同步和异步日志输出的性能差异。以下代码模拟了密集日志输出的场景:
static void log_compare_task(void *param)
{
(void)param;
const int lines_per_burst = 50;
const uint32_t gap_ms = 6000;
const uint32_t max_flush_wait_ms = 8000;
while (1)
{
// ---------- SYNC: 直接输出(包含 I/O 时间) ----------
TickType_t t0 = xTaskGetTickCount();
for (int i = 0; i < lines_per_burst; i++)
{
log_write(&g_logger_sync, LOG_LEVEL_INFO, __FILE__, __LINE__,
"SYNC #%d: payload=ABCDEFGHIJKLMNOPQRSTUVWXYZabcdefghijklmnopqrstuvwxyz0123456789", i);
}
TickType_t t1 = xTaskGetTickCount();
const uint32_t sync_ms = (uint32_t)((t1 - t0) * portTICK_PERIOD_MS);
// ---------- ASYNC: 先入队,再等待后台 flush 刷空 ----------
while (log_buffer_available(&g_logger) > 0)
{
vTaskDelay(pdMS_TO_TICKS(1));
}
TickType_t enq0 = xTaskGetTickCount();
for (int i = 0; i < lines_per_burst; i++)
{
log_write(&g_logger, LOG_LEVEL_INFO, __FILE__, __LINE__,
"ASYNC #%d: payload=ABCDEFGHIJKLMNOPQRSTUVWXYZabcdefghijklmnopqrstuvwxyz0123456789", i);
}
TickType_t enq1 = xTaskGetTickCount();
const uint32_t enq_ms = (uint32_t)((enq1 - enq0) * portTICK_PERIOD_MS);
TickType_t flush0 = xTaskGetTickCount();
const TickType_t timeout_ticks = pdMS_TO_TICKS(max_flush_wait_ms);
while (log_buffer_available(&g_logger) > 0)
{
if ((xTaskGetTickCount() - flush0) >= timeout_ticks)
{
break;
}
vTaskDelay(pdMS_TO_TICKS(1));
}
TickType_t flush1 = xTaskGetTickCount();
const uint32_t flush_ms = (uint32_t)((flush1 - flush0) * portTICK_PERIOD_MS);
log_write(&g_logger_sync, LOG_LEVEL_WARN, __FILE__, __LINE__,
"PERF %d lines: SYNC=%lu ms | ASYNC enqueue=%lu ms, flush=%lu ms",
lines_per_burst,
(unsigned long)sync_ms,
(unsigned long)enq_ms,
(unsigned long)flush_ms);
vTaskDelay(pdMS_TO_TICKS(gap_ms));
}
}
运行上述测试后,我们可以从输出中获取关键的耗时数据:
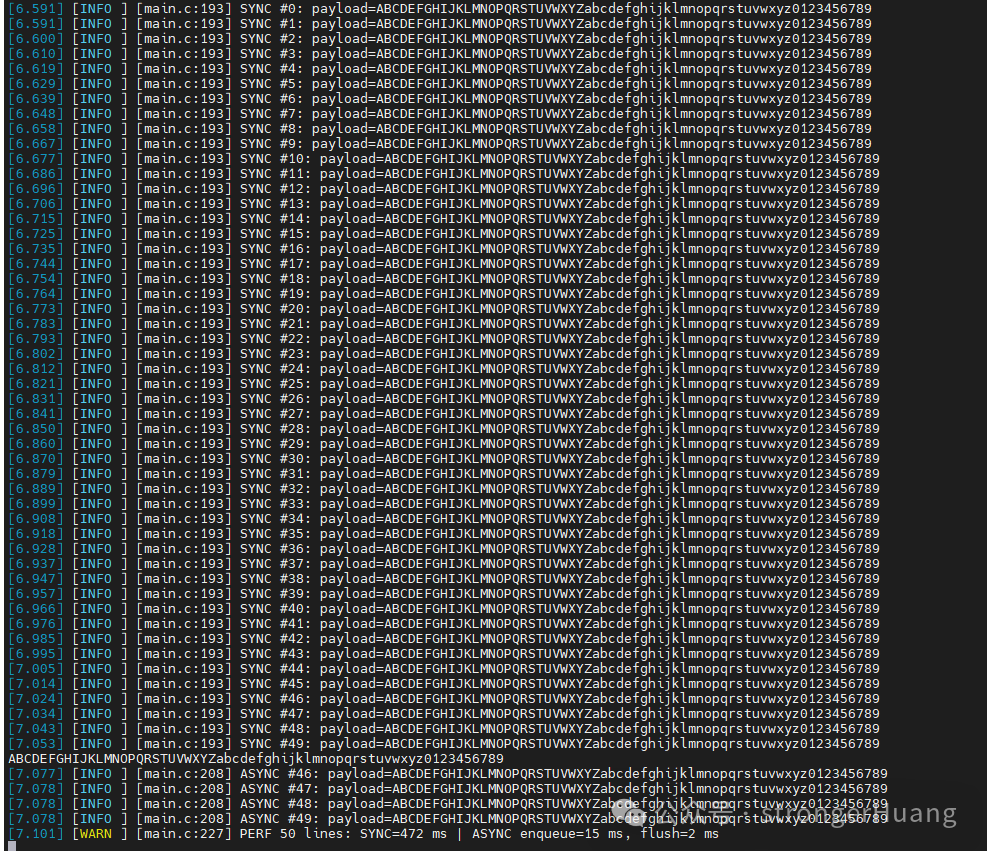
性能对比:
| 模式 |
50条日志耗时 |
说明 |
| 同步模式 |
~472ms |
每条日志都立即输出到串口 |
| 异步模式 |
~17ms |
写入内存缓冲区+刷新 |
异步模式的核心是把整行字符串写入环形缓冲区。当日志产生的速度超过后台消费速度时,缓冲区满了就会覆盖最旧的字节。优化方向通常包括:调大 LOG_BUFFER_SIZE、提高输出后端(如串口)的速率。
1.1.2 不同日志级别
日志系统支持多个级别,方便在不同场景下过滤信息:
void test_basic_levels(void)
{
LOG_ERROR("This is an ERROR message");
LOG_WARN("This is a WARN message");
LOG_INFO("This is an INFO message");
LOG_DEBUG("This is a DEBUG message");
LOG_VERBOSE("This is a VERBOSE message");
}
1.1.3 格式化输出
支持类似 printf 的格式化输出,便于记录各种变量和状态:
void test_formatted_output(void)
{
int temp = 25;
float voltage = 3.3f;
const char *status = "running";
LOG_INFO("Temperature: %d°C", temp);
LOG_INFO("Voltage: %.2fV", voltage);
LOG_INFO("System status: %s", status);
LOG_DEBUG("Hex data: 0x%02X 0x%04X", 0xAB, 0x1234);
}
1.1.4 级别过滤
可以通过配置全局日志级别,过滤掉低优先级的日志,这在提升发布版本性能时非常有用:
log_config_t config;
log_get_freertos_config(&config);
config.level = LOG_LEVEL_WARN; // 只输出WARN及以上级别
log_init(&g_logger, &config);
void test_level_filter(void)
{
LOG_ERROR("ERROR"); // 输出
LOG_WARN("WARN"); // 输出
LOG_INFO("INFO"); // 被过滤
LOG_DEBUG("DEBUG"); // 被过滤
}
级别过滤的性能优势:低于当前配置级别的日志在格式化之前就被拒绝,避免了不必要的字符串处理开销。
1.2 本文最小实现设计思路
在开始设计前,我们明确几个核心原则,确保系统的简洁和实用:
- 只做最小闭环:核心目标是实现“产生日志 → 缓存 → 输出”的完整流程。
- 静态资源优先:全部使用静态或编译期分配的缓冲区与控制结构,彻底避免
malloc/free 带来的复杂性和不确定性。
- 基于FreeRTOS,不依赖复杂特性:初期不做过度抽象,直接基于 FreeRTOS 实现。优先使用临界区等轻量级锁保证数据一致性;需要异步处理时再引入单独的后台任务。
- 写日志尽量短、可失败:记录路径的设计以“尽快返回”为首要目标;缓冲区满时允许丢弃或覆盖旧数据,策略可配置但实现保持简单。
- 异步为可选项:默认采用直接调用平台输出的同步模式;当输出可能阻塞主流程(如低速串口)时,再启用环形缓冲区与后台刷新任务。
- 接口最小化:仅抽象 2 个必须的平台钩子(输出函数、时间戳函数),其余参数提供合理的默认值。
1.3 核心功能需求
基于上述思路,我们的日志系统需要实现以下功能:
- 日志级别:分为 ERROR, WARN, INFO, DEBUG, VERBOSE 5个级别,低级别日志自动过滤。
- 格式化输出:支持
printf 风格的格式化字符串。
- 时间戳:每条日志附带时间戳,便于分析时序。
- 文件名和行号:自动记录日志产生的源文件和行号,快速定位代码位置。
- 同步/异步模式:同步模式立即输出,异步模式先写入缓冲区,由后台任务统一输出。
- 环形缓冲区:异步模式的核心,使用固定大小的环形缓冲区,写满后覆盖最旧数据。
- 后台刷新任务:自动创建 FreeRTOS 任务,定期将缓冲区内的日志数据输出到后端。
- 平台适配:通过函数指针抽象输出和时间戳接口,便于移植。
下面的流程图清晰地展示了同步和异步两种模式的工作流程差异:
同步模式流程:
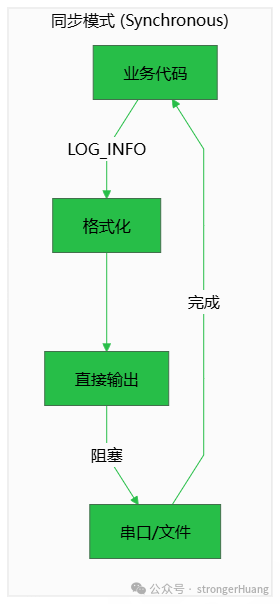
在同步模式下,调用 LOG_INFO 等宏会立即触发格式化并直接通过输出函数(如串口发送)输出数据,该过程是阻塞的,完成后才返回。
异步模式流程:
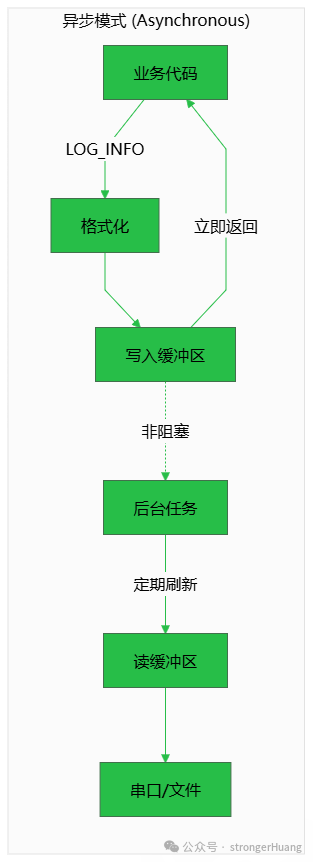
在异步模式下,调用日志宏仅完成格式化和缓冲区写入,然后立即返回。真正的输出操作由一个独立的后台任务定期执行,从缓冲区读取数据并发送。这种模式尤其适合在中断等不允许阻塞的上下文中记录日志。
1.4 日志配置项
系统通过一系列宏定义进行灵活配置,用户可以根据资源情况调整:
// 环形缓冲区大小,根据RAM大小调整
#ifndef LOG_BUFFER_SIZE
#define LOG_BUFFER_SIZE 512
#endif
// 单条日志最大长度
#ifndef LOG_MAX_LINE_SIZE
#define LOG_MAX_LINE_SIZE 256
#endif
// 刷新任务配置
#ifndef LOG_FLUSH_INTERVAL_MS
#define LOG_FLUSH_INTERVAL_MS 50 // 刷新间隔
#endif
#ifndef LOG_FLUSH_TASK_STACK_SIZE
#define LOG_FLUSH_TASK_STACK_SIZE 512 // 刷新任务栈大小
#endif
#ifndef LOG_FLUSH_TASK_PRIORITY
#define LOG_FLUSH_TASK_PRIORITY 1 // 刷新任务优先级
#endif
// 功能开关
#ifndef LOG_ENABLE_TIMESTAMP
#define LOG_ENABLE_TIMESTAMP 1 // 启用时间戳
#endif
#ifndef LOG_ENABLE_FILE_LINE
#define LOG_ENABLE_FILE_LINE 1 // 启用文件名和行号
#endif
#ifndef LOG_ENABLE_COLOR
#define LOG_ENABLE_COLOR 1 // 启用颜色(终端)
#endif
#ifndef LOG_ENABLE_THREAD_SAFE
#define LOG_ENABLE_THREAD_SAFE 0 // 线程安全(需要提供锁函数)
#endif
#ifndef LOG_ENABLE_ASYNC
#define LOG_ENABLE_ASYNC 1 // 异步模式
#endif
#ifndef LOG_ENABLE_FLUSH_TASK
#define LOG_ENABLE_FLUSH_TASK 1 // 启用自动刷新任务
#endif
1.5 数据结构设计
1.5.1 日志级别定义
typedef enum
{
LOG_LEVEL_NONE = 0, // 关闭日志
LOG_LEVEL_ERROR, // 错误
LOG_LEVEL_WARN, // 警告
LOG_LEVEL_INFO, // 信息
LOG_LEVEL_DEBUG, // 调试
LOG_LEVEL_VERBOSE, // 详细
} log_level_t;
这5个级别通常足够覆盖各种场景:
- ERROR:系统无法继续运行的致命错误。
- WARN:异常情况,但系统可降级运行。
- INFO:关键的系统运行节点信息。
- DEBUG:详细的调试信息,用于开发阶段。
- VERBOSE:最详尽的跟踪信息,平时一般不开启。
在发布版本中,通常将级别设置为 WARN 或 INFO,以节省资源和存储空间。
1.5.2 配置结构
typedef struct
{
log_level_t level; // 日志级别
log_backend_t backend; // 后端类型
log_output_fn output_fn; // 输出函数
log_timestamp_fn timestamp_fn; // 时间戳函数
log_lock_fn lock_fn; // 加锁函数
log_unlock_fn unlock_fn; // 解锁函数
bool enable_color; // 是否启用颜色
bool enable_async; // 是否启用异步
#if LOG_ENABLE_FLUSH_TASK
// 平台相关的任务操作(用于启动后台刷新任务)
log_task_create_fn task_create_fn; // 创建任务函数
log_task_delete_fn task_delete_fn; // 删除任务函数
log_delay_ms_fn delay_ms_fn; // 延时函数
#endif
} log_config_t;
初始化时需要填充此结构体。其中 output_fn 和 timestamp_fn 是必须实现的回调函数。其他如锁函数、任务函数等可根据实际需求选择性提供。
1.5.3 日志对象
typedef struct
{
log_config_t config; // 配置
log_buffer_t buffer; // 缓冲区
bool initialized; // 初始化标志
#if LOG_ENABLE_FLUSH_TASK
void *flush_task_handle; // 刷新任务句柄(平台相关)
bool flush_task_running; // 刷新任务运行状态
#endif
} logger_t;
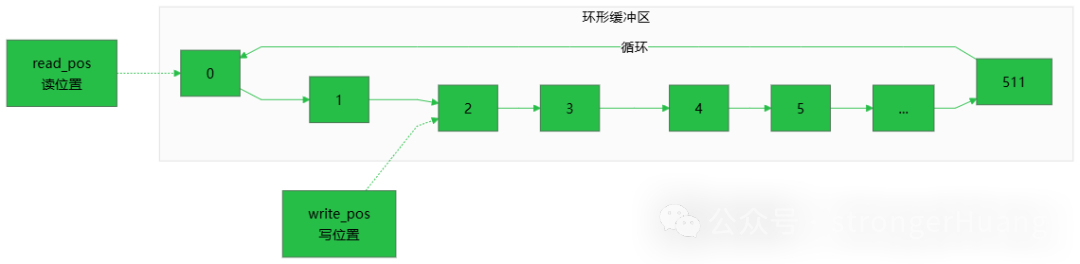
1.5.4 环形缓冲区
异步模式的核心是环形缓冲区。它是一种高效利用固定大小内存的数据结构。
typedef struct
{
char buffer[LOG_BUFFER_SIZE]; // 环形缓冲区
uint16_t write_pos; // 写位置
uint16_t read_pos; // 读位置
uint16_t count; // 当前数据量
} log_buffer_t;
// 环形缓冲区写入
static size_t ring_buffer_write(log_buffer_t *buf, const char *data, size_t len)
{
if (!buf || !data || len == 0)
return 0;
size_t written = 0;
for (size_t i = 0; i < len; i++)
{
// 缓冲区满,覆盖最旧的数据
if (buf->count >= LOG_BUFFER_SIZE)
{
buf->read_pos = (buf->read_pos + 1) % LOG_BUFFER_SIZE;
buf->count--;
}
buf->buffer[buf->write_pos] = data[i];
buf->write_pos = (buf->write_pos + 1) % LOG_BUFFER_SIZE;
buf->count++;
written++;
}
return written;
}
// 环形缓冲区读取
static size_t ring_buffer_read(log_buffer_t *buf, char *data, size_t len)
{
if (!buf || !data || len == 0)
return 0;
size_t read = 0;
while (read < len && buf->count > 0)
{
data[read++] = buf->buffer[buf->read_pos];
buf->read_pos = (buf->read_pos + 1) % LOG_BUFFER_SIZE;
buf->count--;
}
return read;
}
为什么选择环形缓冲区?
- 内存确定:大小固定,在编译期分配,无内存碎片之忧。
- 覆盖策略:写满后自动覆盖最旧数据。虽然可能丢失历史日志,但保证了系统在日志爆发时不会因缓冲区满而阻塞或崩溃,这是一种实用的权衡。
- 效率高:读、写操作都是 O(1) 时间复杂度,仅移动指针,无需数据搬移。
1.6 API接口设计
系统提供一组简洁的API供上层调用:
// 初始化日志系统
bool log_init(logger_t *logger, const log_config_t *config);
// 反初始化日志系统
void log_deinit(logger_t *logger);
// 设置日志级别
void log_set_level(logger_t *logger, log_level_t level);
// 获取日志级别
log_level_t log_get_level(const logger_t *logger);
// 日志输出核心函数
void log_write(logger_t *logger, log_level_t level,
const char *file, int line,
const char *fmt, ...);
// 刷新缓冲区(强制输出)
void log_flush(logger_t *logger);
// 从缓冲区读取数据
size_t log_read_buffer(logger_t *logger, char *buf, size_t size);
// 获取缓冲区可用数据量
size_t log_buffer_available(const logger_t *logger);
// 获取日志级别字符串
const char* log_level_str(log_level_t level);
// 获取日志级别颜色
const char* log_level_color(log_level_t level);
#if LOG_ENABLE_FLUSH_TASK
// 启动后台刷新任务
bool log_start_flush_task(logger_t *logger);
// 停止后台刷新任务
void log_stop_flush_task(logger_t *logger);
#endif
1.6.1 宏定义
为了方便使用,我们定义了一系列宏,它们会自动填充 __FILE__ 和 __LINE__ 参数:
#if LOG_ENABLE_FILE_LINE
#define LOG_ERROR(fmt, ...) log_write(&g_logger, LOG_LEVEL_ERROR, __FILE__, __LINE__, fmt, ##__VA_ARGS__)
#define LOG_WARN(fmt, ...) log_write(&g_logger, LOG_LEVEL_WARN, __FILE__, __LINE__, fmt, ##__VA_ARGS__)
#define LOG_INFO(fmt, ...) log_write(&g_logger, LOG_LEVEL_INFO, __FILE__, __LINE__, fmt, ##__VA_ARGS__)
#define LOG_DEBUG(fmt, ...) log_write(&g_logger, LOG_LEVEL_DEBUG, __FILE__, __LINE__, fmt, ##__VA_ARGS__)
#define LOG_VERBOSE(fmt, ...) log_write(&g_logger, LOG_LEVEL_VERBOSE, __FILE__, __LINE__, fmt, ##__VA_ARGS__)
#else
#define LOG_ERROR(fmt, ...) log_write(&g_logger, LOG_LEVEL_ERROR, NULL, 0, fmt, ##__VA_ARGS__)
#define LOG_WARN(fmt, ...) log_write(&g_logger, LOG_LEVEL_WARN, NULL, 0, fmt, ##__VA_ARGS__)
#define LOG_INFO(fmt, ...) log_write(&g_logger, LOG_LEVEL_INFO, NULL, 0, fmt, ##__VA_ARGS__)
#define LOG_DEBUG(fmt, ...) log_write(&g_logger, LOG_LEVEL_DEBUG, NULL, 0, fmt, ##__VA_ARGS__)
#define LOG_VERBOSE(fmt, ...) log_write(&g_logger, LOG_LEVEL_VERBOSE, NULL, 0, fmt, ##__VA_ARGS__)
#endif
1.6.2 日志写函数(核心)
这是整个系统最核心的函数,负责格式化、过滤和输出(或缓冲)日志:
void log_write(logger_t *logger, log_level_t level,
const char *file, int line,
const char *fmt, ...)
{
if (!logger || !logger->initialized)
return;
// 级别过滤
if (level > logger->config.level)
return;
// 加锁(多任务环境)
if (LOG_ENABLE_THREAD_SAFE && logger->config.lock_fn)
logger->config.lock_fn();
char log_line[LOG_MAX_LINE_SIZE] = {0};
int offset = 0;
// 时间戳
if (LOG_ENABLE_TIMESTAMP && logger->config.timestamp_fn)
{
uint32_t ts = logger->config.timestamp_fn();
offset += snprintf(log_line + offset, LOG_MAX_LINE_SIZE - offset,
"[%u.%03u] ", ts / 1000, ts % 1000);
}
// 日志颜色、级别
if (logger->config.enable_color)
{
offset += snprintf(log_line + offset, LOG_MAX_LINE_SIZE - offset,
"%s[%s]%s ",
log_level_color(level),
log_level_str(level),
LOG_COLOR_RESET);
}
else
{
offset += snprintf(log_line + offset, LOG_MAX_LINE_SIZE - offset,
"[%s] ", log_level_str(level));
}
// 文件名和行号
if (LOG_ENABLE_FILE_LINE && file)
{
offset += snprintf(log_line + offset, LOG_MAX_LINE_SIZE - offset,
"[%s:%d] ", get_filename(file), line);
}
// 用户消息
va_list args;
va_start(args, fmt);
offset += vsnprintf(log_line + offset, LOG_MAX_LINE_SIZE - offset, fmt, args);
va_end(args);
// 换行符
if (offset < LOG_MAX_LINE_SIZE - 3)
{
log_line[offset++] = '\r';
log_line[offset++] = '\n';
log_line[offset] = '\0';
}
// 输出逻辑
if (logger->config.enable_async)
{
// 异步模式:写入缓冲区
ring_buffer_write(&logger->buffer, log_line, offset);
}
else
{
// 同步模式:直接输出
if (logger->config.output_fn)
logger->config.output_fn(log_line, offset);
}
// 解锁
if (LOG_ENABLE_THREAD_SAFE && logger->config.unlock_fn)
logger->config.unlock_fn();
}
1.6.3 后台刷新任务
在异步模式下,需要一个独立的任务来定期将缓冲区中的数据输出到实际的后端(如串口):
static void log_flush_task_entry(void *param)
{
logger_t *logger = (logger_t *)param;
while (logger->flush_task_running)
{
// 如果有数据就刷新
if (log_buffer_available(logger) > 0)
{
log_flush(logger);
}
if (logger->config.delay_ms_fn)
{
logger->config.delay_ms_fn(LOG_FLUSH_INTERVAL_MS);
}
}
if (logger->config.task_delete_fn)
{
logger->config.task_delete_fn(NULL);
}
}
bool log_start_flush_task(logger_t *logger)
{
if (!logger || !logger->initialized)
return false;
// 检查平台回调函数是否提供
if (!logger->config.task_create_fn || !logger->config.delay_ms_fn)
{
return false;
}
// 检查是否已经启动
if (logger->flush_task_running)
return true;
logger->flush_task_running = true;
// 使用平台提供的任务创建函数
logger->flush_task_handle = logger->config.task_create_fn(
log_flush_task_entry,
logger,
LOG_FLUSH_TASK_STACK_SIZE,
LOG_FLUSH_TASK_PRIORITY
);
if (logger->flush_task_handle == NULL)
{
logger->flush_task_running = false;
return false;
}
return true;
}
该任务以较低的优先级运行,定期检查并刷新缓冲区(间隔由 LOG_FLUSH_INTERVAL_MS 配置),避免影响主业务逻辑。
1.7 FreeRTOS 平台适配
为了让日志系统在 FreeRTOS 上运行,我们需要实现几个平台相关的钩子函数。
1.7.1 输出函数
通常实现为串口发送。这里展示一个使用 DMA 传输以提高效率的非阻塞实现示例:
typedef void(*log_output_fn)(const char *data, size_t len);
void log_output_uart_freertos(const char *data, size_t len)
{
if (data == NULL || len == 0)
return;
if (uart1_tx_done == NULL)
{
// 未初始化时退化为阻塞发送
HAL_UART_Transmit(&huart1, (uint8_t*)data, (uint16_t)len, 0xFFFF);
return;
}
while (len > 0)
{
size_t chunk = (len > sizeof(uart1_tx_buf)) ? sizeof(uart1_tx_buf) : len;
// 等待上一次 DMA 完成
xSemaphoreTake(uart1_tx_done, portMAX_DELAY);
// 拷贝到静态缓冲,保证 DMA 期间数据稳定
memcpy(uart1_tx_buf, data, chunk);
// 启动 DMA
if (HAL_UART_Transmit_DMA(&huart1, uart1_tx_buf, (uint16_t)chunk) != HAL_OK)
{
xSemaphoreGive(uart1_tx_done);
break;
}
data += chunk;
len -= chunk;
// 发送完成由 HAL_UART_TxCpltCallback() 释放 uart1_tx_done
}
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart == &huart1 && uart1_tx_done != NULL)
{
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
(void)xSemaphoreGiveFromISR(uart1_tx_done, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
}
1.7.2 时间戳函数
使用 FreeRTOS 的系统时钟来提供时间戳:
typedef uint32_t(*log_timestamp_fn)(void);
uint32_t log_timestamp_rtos(void)
{
return xTaskGetTickCount() * portTICK_PERIOD_MS;
}
时间戳的精度取决于 FreeRTOS 的 configTICK_RATE_HZ 配置。
1.7.3 线程安全
在多任务环境中,需要对共享的缓冲区资源进行保护:
typedef void(*log_lock_fn)(void);
typedef void(*log_unlock_fn)(void);
static SemaphoreHandle_t log_mutex = NULL;
void log_lock_freertos(void)
{
if (log_mutex != NULL)
{
xSemaphoreTake(log_mutex, portMAX_DELAY);
}
}
void log_unlock_freertos(void)
{
if (log_mutex != NULL)
{
xSemaphoreGive(log_mutex);
}
}
1.7.4 日志任务管理
这些函数封装了 FreeRTOS 的任务操作接口,供日志系统内部创建和管理后台刷新任务:
void* log_task_create_freertos(void (*task_func)(void*), void *param,
uint32_t stack_size, uint32_t priority)
{
TaskHandle_t task_handle = NULL;
BaseType_t ret = xTaskCreate(
task_func,
"log_flush",
stack_size / sizeof(StackType_t),
param,
priority,
&task_handle
);
return (ret == pdPASS) ? task_handle : NULL;
}
void log_task_delete_freertos(void *task_handle)
{
vTaskDelete((TaskHandle_t)task_handle);
}
void log_delay_ms_freertos(uint32_t ms)
{
vTaskDelay(pdMS_TO_TICKS(ms));
}
1.7.5 获取 FreeRTOS 平台的日志配置
提供一个便捷函数,返回一组针对 FreeRTOS 平台的默认配置:
void log_get_freertos_config(log_config_t *config)
{
if (config == NULL)
return;
// 填充默认配置
config->level = LOG_LEVEL_INFO;
config->backend = LOG_BACKEND_UART;
config->output_fn = log_output_uart_freertos;
config->timestamp_fn = log_timestamp_freertos;
config->lock_fn = log_lock_freertos;
config->unlock_fn = log_unlock_freertos;
config->enable_color = false;
config->enable_async = true;
#if LOG_ENABLE_FLUSH_TASK
config->task_create_fn = log_task_create_freertos;
config->task_delete_fn = log_task_delete_freertos;
config->delay_ms_fn = log_delay_ms_freertos;
#endif
}
用户通常只需调用此函数获取默认配置,再按需修改个别项(如日志级别),然后传递给 log_init 即可。
2. 局限性
作为一个旨在“最小可用”的教学实现,本系统也存在一些局限性,在实际复杂项目中需要根据情况扩展或选用更成熟的方案。
2.1 缓冲区容量限制
- 问题:采用固定的 512B 环形缓冲区,在高频日志场景下极易被快速填满,导致关键历史日志被覆盖丢失。
- 常见优化方向:
- 根据可用 RAM 直接加大缓冲区。
- 采用双缓冲或多缓冲策略,降低覆盖概率。
- 将覆盖策略设计为可配置:例如可选择“丢新保旧”,或提供缓冲区溢出回调函数进行告警和计数。
2.2 时间戳精度
- 问题:时间戳精度受限于系统 Tick 周期(如 1ms)。在密集打点日志时,多条日志可能共享相同的时间戳,难以区分微秒级先后顺序。
- 解决方案:需要更细粒度时序时,可以接入硬件高精度定时器(如 Cortex-M 系列中的 DWT 周期计数器)来获取微秒级时间戳。
2.3 Flash存储支持
当前实现主要面向实时输出(如串口),不支持日志的掉电保存。这对于需要事后分析离线故障的场景是个短板。
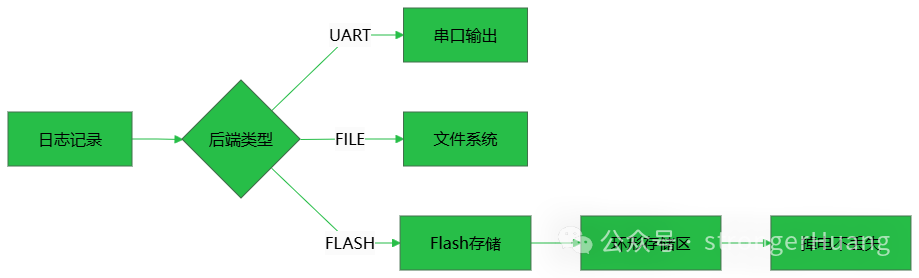
如图所示,要实现掉电不丢失,需要增加 FLASH 存储后端,将日志写入片内 Flash 或外部 SPI Flash,通常同样会采用环形存储区的方式以循环覆盖。
3. 总结
本文详细介绍了一个基于 FreeRTOS 和 C语言 的轻量级嵌入式日志系统的设计思路与核心实现。它具备了级别过滤、格式化输出、异步缓冲等基本功能,代码结构清晰,适合学习或在资源紧张的项目中作为起点。
这个实现偏向“最小可用”,旨在阐明原理。在实际的复杂、高频或高可靠性场景中,通常需要考虑以下扩展方向,或直接选用更成熟的日志库(如 EasyLogger、log4c 等):
- 平台抽象:进一步抽象延时、锁、任务等接口,以适配裸机、RT-Thread、Linux 等多种环境。
- 存储扩展:支持 Flash 环形持久化存储、文件系统落盘、甚至通过网络传输到远程服务器集中存储和分析。
- 功能增强:支持运行时动态修改日志级别、按模块/标签过滤、日志统计分析等高级特性。
希望这篇关于嵌入式日志系统从设计到实践的分析,能为你构建自己的调试工具链带来启发。如果你对更底层的系统机制感兴趣,可以到 云栈社区 与更多开发者交流探讨。
 发表于 2026-1-26 12:04:48
|
查看: 200|
回复: 0
发表于 2026-1-26 12:04:48
|
查看: 200|
回复: 0
