在嵌入式系统开发中,模块间的通信设计是影响系统性能、实时性和可维护性的关键。面对五花八门的通信方式,开发者们常常困惑:全局变量能用吗?回调会不会导致“地狱”?异步队列的开销有多大?本文将从底层机制与工程实践出发,深入对比几种核心通信方式的适用场景、潜在陷阱与设计要点,帮助你在项目中做出更优的架构决策。
1. 全局变量:被误解的性能王者
全局变量常被视为“不良设计”,但在嵌入式系统中,它却是性能最优的通信方式之一。问题的关键不在于是否使用,而在于如何正确设计。
全局变量的问题不在于性能,而在于访问控制。它的本质是零拷贝的共享内存,这正是其性能优势的来源。
数据竞争的底层机制
为什么会出现数据竞争?本质在于非原子操作的中断。
考虑这个操作:
volatile uint32_t counter = 0;
counter++; // 看起来是原子的,实际上不是
在 ARM Cortex-M 架构中,这条语句通常被编译为:
LDR r0, [counter_addr] ; 读取当前值
ADD r0, r0, #1 ; 加1
STR r0, [counter_addr] ; 写回内存
如果在 LDR 和 STR 之间发生中断,且中断处理函数也修改了 counter,就会导致数据丢失或错乱。这正是理解并防范竞争条件的起点。
原子操作的策略
策略1:关中断保护(适用于简单数据)
对于简单的数据读写,最直接的方法是使用临界区保护。在读取或修改共享数据时,暂时屏蔽中断。
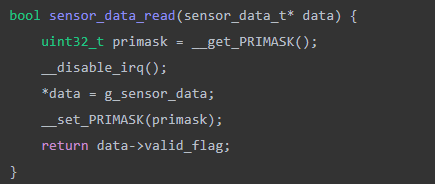
代码展示了在读取传感器数据时,通过临时关闭中断 (__disable_irq) 来确保操作的原子性。
策略2:无锁算法(适用于高频访问)
对于数据采集等高频访问场景,频繁开关中断会带来额外开销。此时,基于内存屏障的无锁设计是更优选择。这利用了底层硬件的原子操作特性来构建安全的并发访问模型。
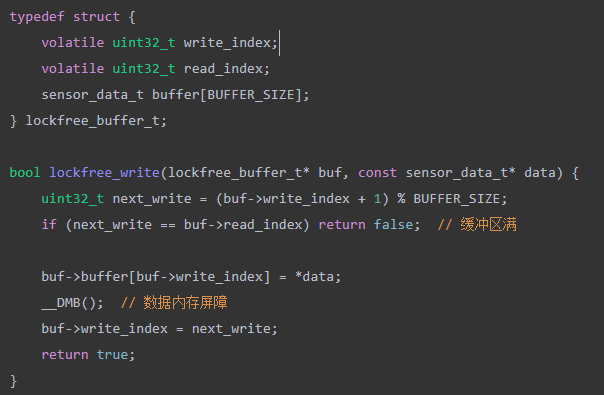
上图展示了一个无锁环形缓冲区的设计,通过 __DMB() (数据内存屏障) 确保写入顺序,避免了互斥锁的开销和死锁风险,是实现高性能通信的关键基础。
2. 回调函数:灵活与风险并存的控制反转
回调函数的本质是控制反转,它将“何时执行”的决定权从调用者转移给被调用者。这种机制在事件驱动系统中具有独特的价值。
回调机制的底层原理
传统的函数调用是推模式:调用者主动调用函数以获取结果。回调函数则是拉模式:调用者注册一个函数,等待事件源在适当时机“拉取”并执行它。
这种差异带来了架构上的优势:
- 时间解耦:事件产生和处理可以在不同时刻进行。
- 空间解耦:事件源和处理函数可以位于不同的模块。
- 多对多关系:一个事件可以触发多个处理函数。
回调函数的致命陷阱
陷阱1:回调中的阻塞操作
这是最常见的错误。例如,在一个1kHz(周期1ms)的传感器采样回调中,如果包含一个2ms的LCD显示操作,系统负载瞬间将达到200%,导致采样周期被严重破坏。
陷阱2:回调递归调用
更隐蔽的问题是递归调用链。设想传感器回调触发报警函数,而报警函数内部又去读取传感器数据,从而再次触发传感器回调,形成无限递归或意料之外的复杂交互。
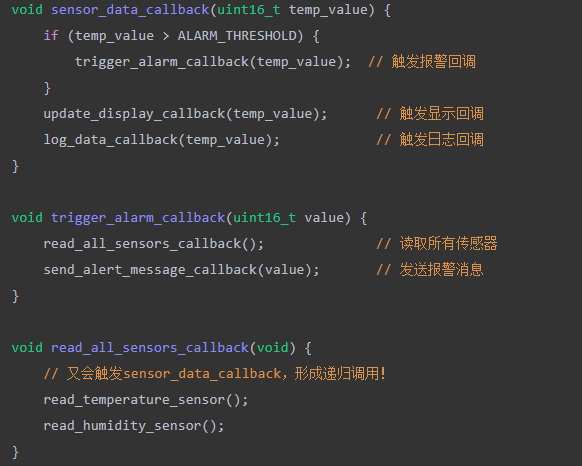
上图代码模拟了回调嵌套可能引发的递归问题,sensor_data_callback 触发的报警回调内部又调用了 read_all_sensors_callback。
陷阱3:回调函数中的动态内存分配
在中断上下文或高优先级任务中调用 malloc 是灾难性的,可能导致堆碎片、分配失败或不可预测的延迟。
高性能回调设计模式
一个设计良好的回调管理器可以规避上述风险。其核心是将回调的注册与执行解耦,并引入优先级和异步处理机制。
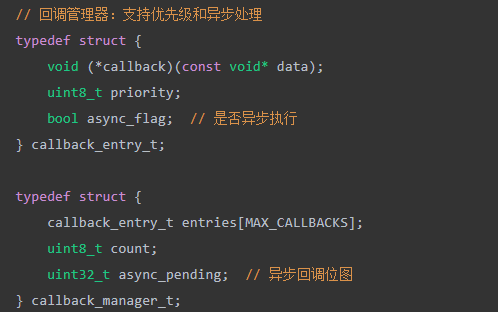
该数据结构为每个回调条目设置了优先级和异步标志,为灵活调度奠定了基础。
核心设计原则:
- 同步回调:仅执行数据拷贝、状态设置等极简操作,确保耗时极短(如<10μs)。
- 异步回调:将复杂的、耗时的处理逻辑封装为事件,推送到消息队列,由专门的、低优先级的任务异步执行。
- 优先级管理:高优先级的回调(如紧急报警)能够被优先调度执行,确保关键功能的实时性。
3. 异步通信:以空间换时间的系统思维
异步通信的核心价值在于系统思维的转变:从“立即处理”转向“延迟处理”,从“同步等待”转向“异步响应”。
异步通信的本质:时间维度的解耦
- 同步通信像电话通话:双方必须同时在线,一方讲话时另一方只能等待。
- 异步通信像电子邮件:发送方投递后即可继续工作,接收方在方便时处理。
这种差异对嵌入式系统影响深远:
- 同步模式的问题:高优先级任务被低优先级操作阻塞;系统响应时间波动大;模块间强耦合,难以扩展。
- 异步模式的优势:生产者与消费者时间解耦;队列缓冲可平滑处理突发数据;不同优先级的任务得以隔离。
消息队列的设计
在资源受限的嵌入式环境中,传统的动态内存分配消息队列是反模式,容易导致内存碎片、分配失败和不可重入问题。
稳健的设计应遵循以下原则:
- 预分配策略:系统启动时静态分配所有队列和消息所需内存。
- 固定大小消息:使用固定长度的数据体,避免可变长度带来的复杂性和内存管理开销。
- 环形缓冲区:基于数组实现高效的FIFO队列。
- 无锁算法:在单生产者单消费者等特定场景下,使用原子操作避免互斥锁。
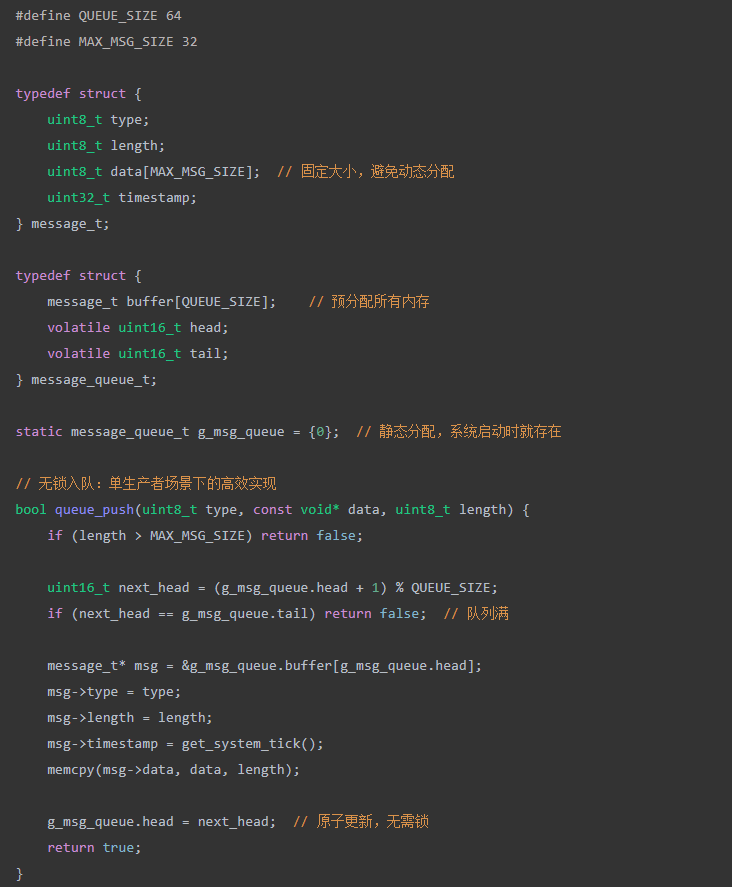
代码展示了一个静态分配的消息队列实现,所有内存已在编译期确定,避免了运行时动态分配的风险,是实现可靠网络/系统通信的基石。
异步通信的时序分析
同步与异步方式在时序上有着天壤之别。同步调用会导致任务链上的阻塞传递,而异步通信通过队列实现了任务间的解耦。
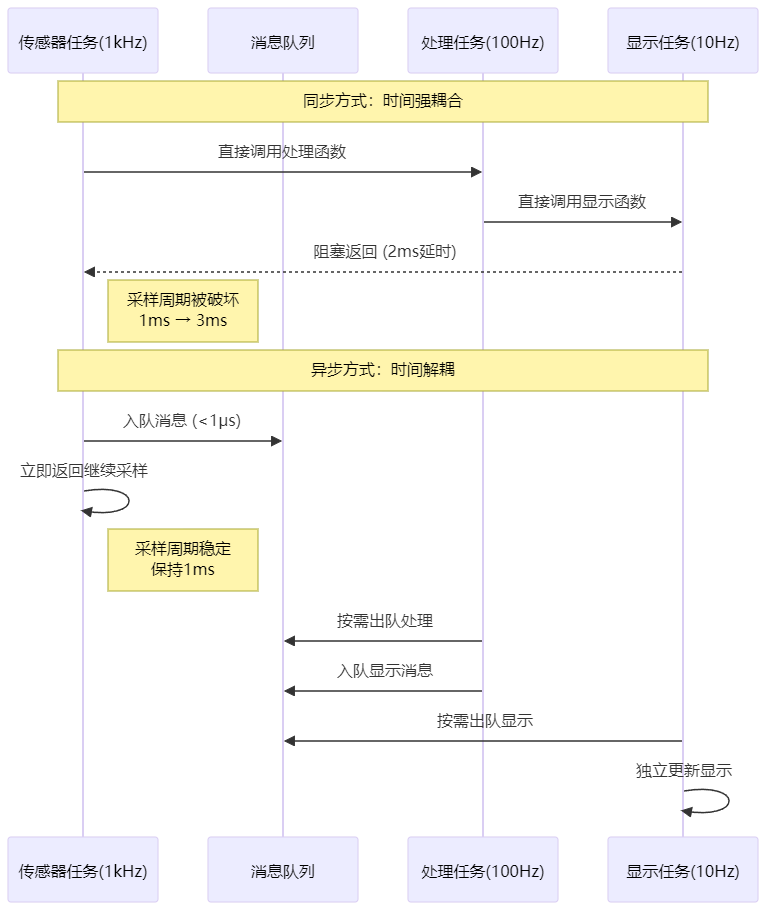
时序图清晰对比了同步方式(时间强耦合)和异步方式(时间解耦)的区别。异步方式下,高频传感器任务仅进行极速的消息入队操作,保证了自身采样周期的稳定。
简而言之,异步通信用少量的内存(队列空间)换取了系统在时间维度上的灵活性和可预测性,这是架构设计上的一次重要升级。
4. 工程经验总结与避坑指南
如何为你的项目选择合适的通信方式?可以遵循以下决策流程:
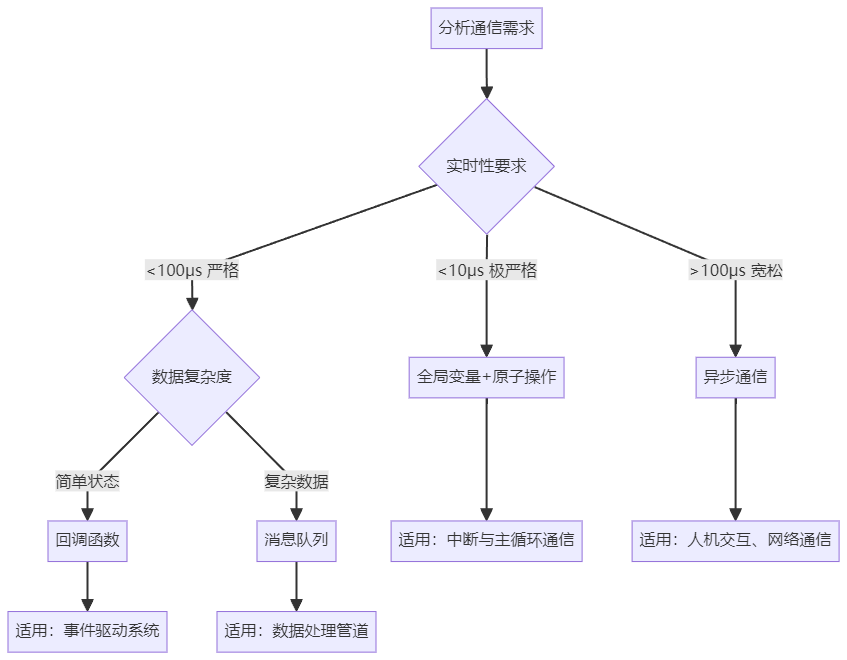
该流程图以实时性要求为首要判断维度,为你提供了清晰的选型路径。
核心判断标准:
- 实时性第一:通信延迟要求(μs级、ms级)直接决定了可选方案的上限。
- 复杂度适中:在满足性能的前提下,选择团队最熟悉、最易维护的方案,避免过度设计。
- 可维护性:代码的可读性和可调试性,长期来看比极致的微优化更重要。
常见陷阱与解决方案
陷阱1:回调地狱
多个回调函数相互嵌套、调用,形成复杂且难以追踪的调用链。
解决思路:引入事件队列,将直接的函数调用转换为事件的发布与订阅。事件处理器在主循环中统一、顺序地处理事件,结构清晰,易于调试。
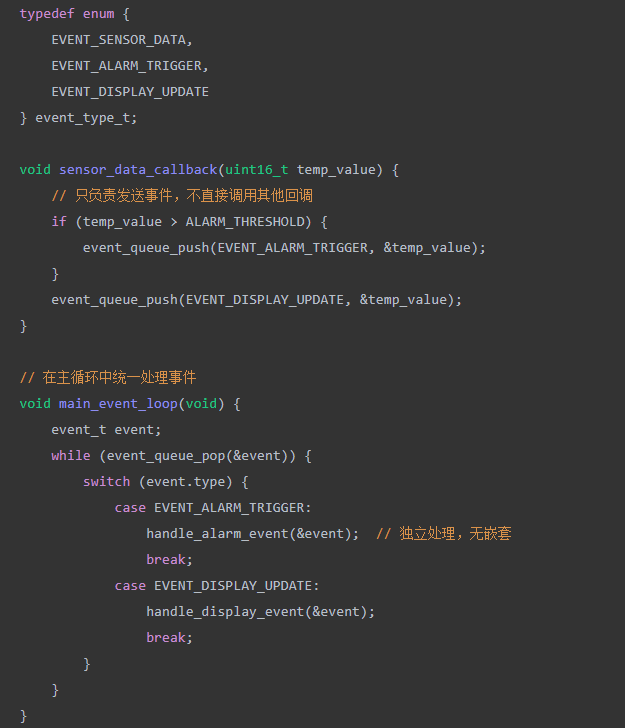
改造后,传感器回调不再直接调用其他函数,而是向队列推送事件,由主事件循环统一处理,彻底解耦。
陷阱2:优先级反转
高优先级的关键控制任务,因为内部调用了低优先级的阻塞操作(如慢速显示、日志写入),导致自身执行时间被拉长,实时性丧失。
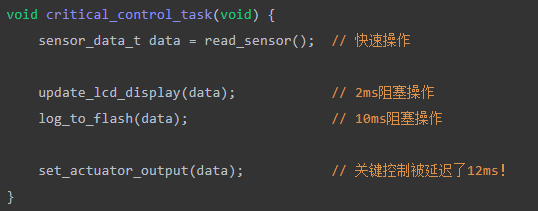
关键的控制输出被非关键的显示和日志操作延迟了12ms,这在实时控制系统中是不可接受的。
解决思路:严格区分同步与异步路径。高优先级任务只做最核心、最紧急的计算和控制,将所有非关键、耗时的操作通过队列异步化。
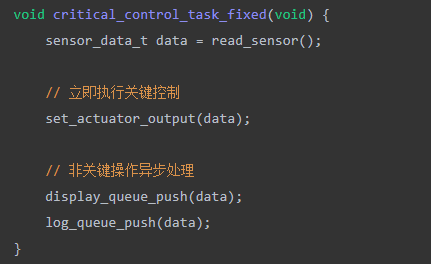
优化后,关键控制 (set_actuator_output) 被立即执行,显示和日志操作被放入队列异步处理,保证了控制的实时性。
写在最后
嵌入式系统的通信设计没有银弹,每种方式都是性能、实时性、复杂度和可维护性之间的权衡。全局变量在原子保护下可以是高效的利器;回调函数在事件驱动模型中不可或缺,但需警惕其陷阱;异步消息队列则是构建复杂、松耦合系统的基石。理解它们的底层机制和适用边界,才能在设计时游刃有余。希望这些来自实战的经验总结,能帮助你在云栈社区的交流与学习中,更高效地解决工程难题。
 发表于 2026-3-12 11:19:18
|
查看: 263|
回复: 0
发表于 2026-3-12 11:19:18
|
查看: 263|
回复: 0
