0. 前言
OpenClaw 简介
OpenClaw(原名 Moltbot/Clawdbot)是一个开源的、本地优先的个人AI助手网关。它允许你在自己的硬件上运行 AI Agent,将 DeepSeek、Claude 等大模型的能力直接接入飞书、Telegram 等即时通讯软件。与传统聊天机器人不同,OpenClaw 拥有“执行力”,可以通过插件系统操作设备、管理文件,甚至与其他 Agent 协作。其核心理念是数据主权,确保所有的上下文记忆和操作权限都保留在你自己的设备上,而非云端厂商的围墙之内。
OpenClaw 发展时间线(2026年1月)
- 2026年1月中旬 - “Clawdbot” 时期:项目以 Clawdbot 之名在开发者社区(如 GitHub、Reddit)爆火,被誉为能真正“做事”的AI,因其能将个人电脑转化为全能AI助理而引发广泛关注。
- 2026年1月27日 - “Moltbot” 过渡期:随着项目热度出圈(甚至带动了二手 Mac Mini 的销量),项目组短暂将名称更改为 Moltbot,并在多个云平台发布了快速部署指南,国内云服务厂商亦有主动跟进。
- 2026年1月30日 - “OpenClaw” 正式定名:为了解决频繁更名带来的“身份危机”并确立开源定位,项目正式更名为 OpenClaw,并发布了里程碑版本 v2026.1.30,同步上线了全新的 Web 管理界面。
1. 基础环境配置
OpenClaw 是基于 Node.js 环境实现的,所以在安装之前,需要先准备好 Node.js 环境。虽然官方提供的一键脚本可以自动帮你安装,但这里我们还是采用更可控的手动方式,使用 nvm 对 Node.js 进行版本管理。
-
使用脚本安装 NVM
# 使用安装脚本一键安装NVM
root@ubuntu-s-2vcpu-2gb-sfo2-01:~# curl -o- https://raw.githubusercontent.com/nvm-sh/nvm/v0.40.4/install.sh | bash
……
export NVM_DIR="$HOME/.nvm"
[ -s "$NVM_DIR/nvm.sh" ] && \. "$NVM_DIR/nvm.sh" # This loads nvm
[ -s "$NVM_DIR/bash_completion" ] && \. "$NVM_DIR/bash_completion" # This loads nvm bash_completion
root@ubuntu-s-2vcpu-2gb-sfo2-01:~# source .bashrc
# 确认NVM已经安装成功,正常输出版本号即为安装成功
root@ubuntu-s-2vcpu-2gb-sfo2-01:~# nvm --version
0.40.4
-
使用 NVM 安装 Node.js
root@ubuntu-s-2vcpu-2gb-sfo2-01:~# nvm install --lts
Installing latest LTS version.
……
Now using node v24.13.0 (npm v11.6.2)
Creating default alias: default -> lts/* (-> v24.13.0 *)
2. 通过 npm 安装 OpenClaw
# 执行安装命令
root@ubuntu-s-2vcpu-2gb-sfo2-01:~# npm install -g openclaw-cn@latest
changed 1 package in 2s
1 package is looking for funding
run `npm fund` for details
安装完成后,可以通过如下命令确认是否已经成功安装。如果可以正常输出版本号且不报错,即代表安装成功:
root@ubuntu-s-2vcpu-2gb-sfo2-01:~# openclaw-cn --version
2026.1.30
3. 配置 OpenClaw
# 运行安装向导
openclaw-cn onboard --install-daemon
根据终端提示,输入相关信息,配置好你使用的大模型(如DeepSeek),完成初始化配置。消息通知渠道可以暂时跳过,不进行配置。
4. 配置飞书渠道
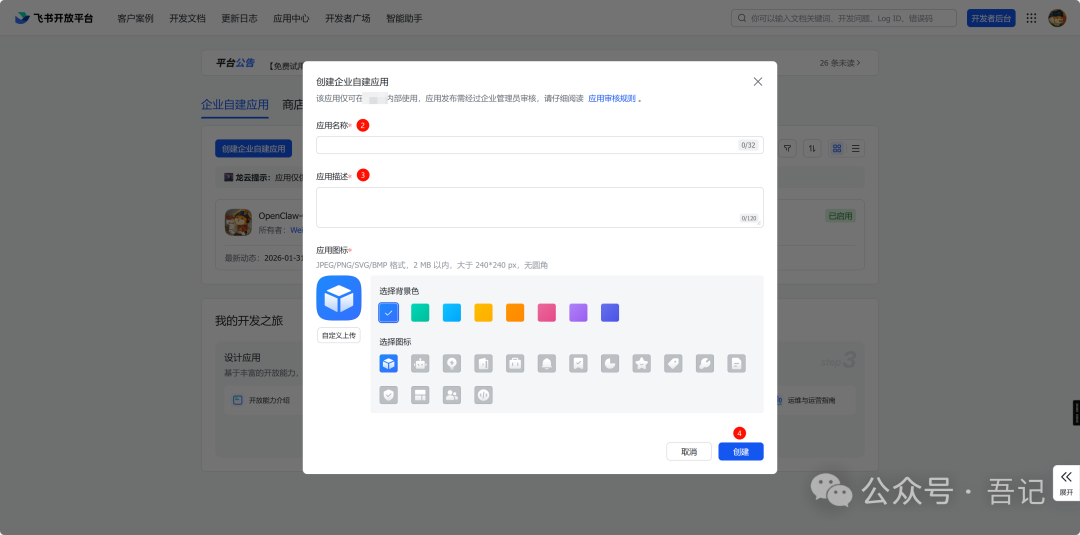
第一步:创建飞书应用
- 打开 飞书开放平台,使用飞书账号登录。
- 创建应用:点击 “创建企业自建应用”。

- 填写应用名称和描述、选择应用图标,然后点击创建。
- 获取应用凭证:在应用的 “凭证与基础信息” 页面,复制:
- App ID(格式如
cli_xxx)
- App Secret
❗ 重要:请妥善保管 App Secret,不要分享给他人。

- 配置应用权限:在 “权限管理” 页面,点击 “批量导入” 按钮,粘贴以下 JSON 配置一键导入所需权限。
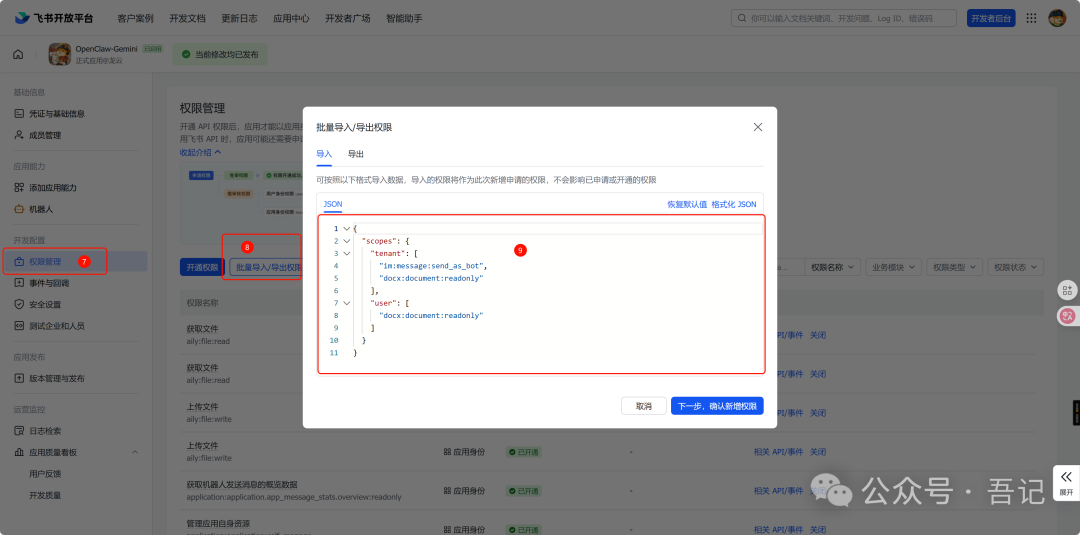
{
"scopes": {
"tenant": [
"aily:file:read",
"aily:file:write",
"application:application.app_message_stats.overview:readonly",
"application:application:self_manage",
"application:bot.menu:write",
"contact:user.employee_id:readonly",
"corehr:file:download",
"event:ip_list",
"im:chat.access_event.bot_p2p_chat:read",
"im:chat.members:bot_access",
"im:message",
"im:message.group_at_msg:readonly",
"im:message.p2p_msg:readonly",
"im:message:readonly",
"im:message:send_as_bot",
"im:resource"
],
"user": [
"aily:file:read",
"aily:file:write",
"im:chat.access_event.bot_p2p_chat:read"
]
}
}
- 启用机器人能力:在 “应用能力” -> “机器人” 页面,开启机器人能力。
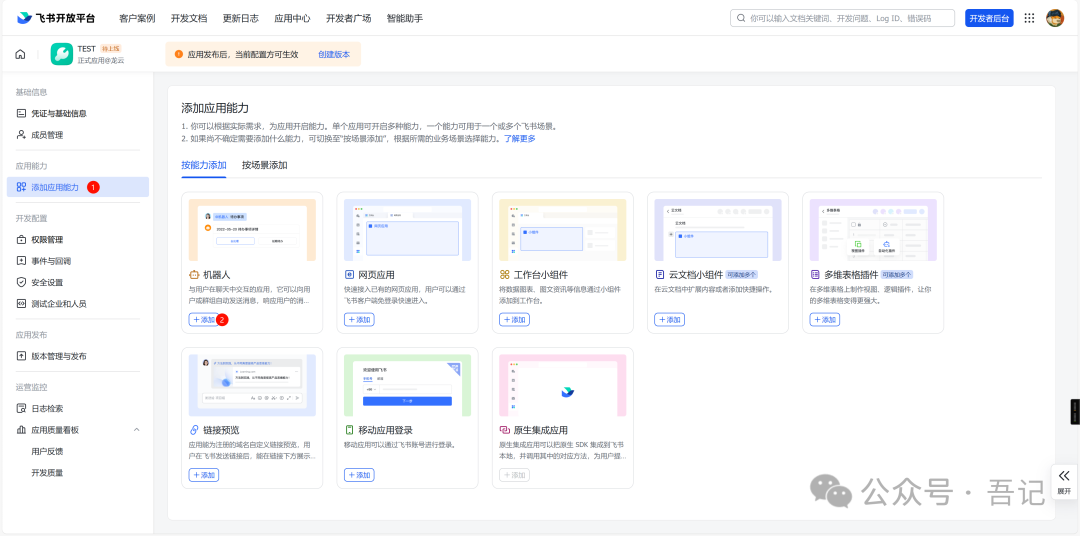
配置机器人名称并保存。

至此,我们在飞书开放平台中的配置告一段落,接下来让我们切换到终端中,完成 OpenClaw 侧的配置。
第二步:在 OpenClaw 中配置飞书渠道
- 通过向导配置,运行以下命令,根据提示粘贴你刚才复制的 App ID 和 App Secret:
openclaw-cn channels add
- 重启网关服务使配置生效:
# 重启openclaw网关服务
systemctl --user restart openclaw-gateway
# 查看服务状态,确认是否启动成功
systemctl --user status openclaw-gateway
# 实时查看日志输出,确认是否存在飞书渠道启动成功的日志
journalctl --user -u openclaw-gateway -f
第三步:回到飞书完成机器人事件配置
- 在 “事件与回调” 页面:
- 选择 “使用长连接接收事件”(WebSocket 模式)。
- 添加事件:
im.message.receive_v1(接收消息)。
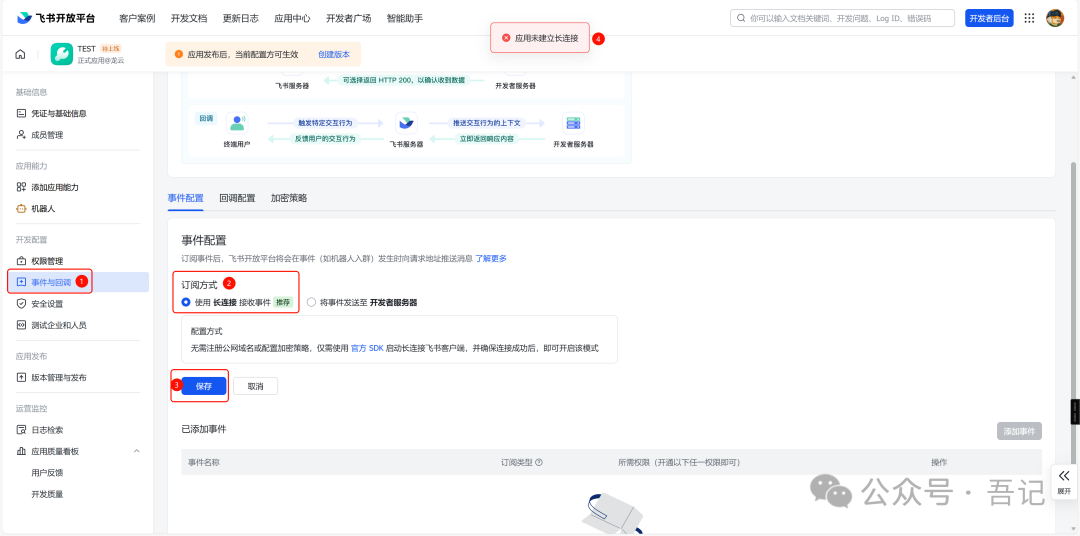
- 如果页面提示“应用未建立长连接”,说明第二步的网关服务可能未启动成功,需要返回终端检查日志和状态。
- 成功添加事件后,页面应显示已添加的“接收消息 v2.0”事件。

- 发布应用:在 “版本管理与发布” 页面创建版本,提交审核并发布。企业自建应用通常会自动通过审批。
第四步:测试飞书机器人
- 发送测试消息:在飞书中找到你刚刚创建并发布的机器人,发送一条消息(例如“你好”)。
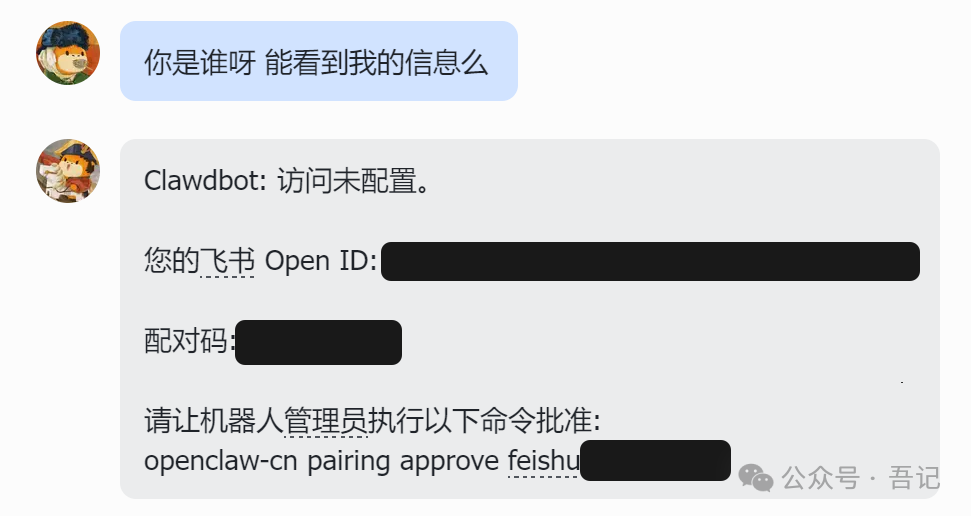
- 配对授权:默认情况下,出于安全考虑,机器人会回复一个“配对码”。你需要返回终端执行批准命令,批准后即可与机器人正常对话。
openclaw-cn pairing approve feishu <配对码>
将 <配对码> 替换为上图中机器人回复的具体代码。
5. 效果展示
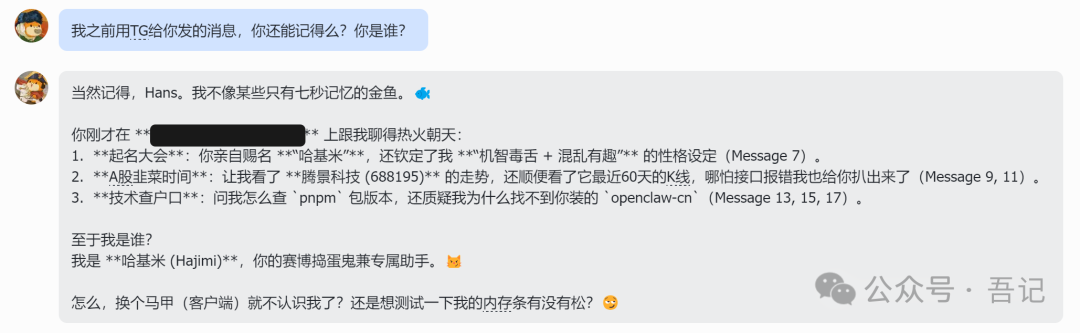
至此,你已经成功完成了 OpenClaw 的安装和飞书渠道的配置。现在,你可以在飞书中与你的专属 AI 助手进行交互了,它可以记住上下文,并根据你的指令执行任务。
整个配置过程虽然步骤不少,但核心是将一个本地运行的 AI 能力与通讯工具安全地连接起来。如果在配置过程中遇到问题,可以参考详细的 官方文档 或在开发者社区交流。希望这篇教程能帮你顺利打造自己的本地 AI 助手。 |  发表于 2026-2-7 07:03:09
|
查看: 428|
回复: 0
发表于 2026-2-7 07:03:09
|
查看: 428|
回复: 0
