在嵌入式 Linux 系统开发中,设备树(Device Tree)扮演着描述硬件拓扑结构与资源属性的核心角色。它成功地将硬件的具体描述从内核源代码中分离出来,旨在解决以往内核中存在大量冗余板级代码的难题。
对于驱动开发工程师来说,设备树配置的准确性是决定性的。你是否遇到过驱动程序 probe 函数没有执行、GPIO 控制异常或者中断毫无反应的情况?据统计,绝大多数这类驱动初始化失效的根源,并非驱动代码本身的逻辑错误,而恰恰是设备树节点的描述与驱动程序所期望的不匹配所导致。
本文将首先介绍如何在内核源码中精准定位目标设备树文件,随后我们将深入剖析 status、compatible、reg 等核心属性的配置规范与常见误区,帮助你从根源上解决驱动加载问题。
1. 设备树文件定位
动手修改设备树配置之前,首要任务是准确识别当前硬件平台正在使用的设备树源码文件。这一步至关重要——如果文件找错了,例如修改了其他平台的 .dts 文件,或者修改了一个根本不会被编译的文件,那么你的所有配置努力都将白费。
1.1 源码目录与文件层级
Linux 内核中的设备树源码通常位于以下路径:
- ARM32:
arch/arm/boot/dts/
- ARM64:
arch/arm64/boot/dts/
这些目录下的文件主要分为两类:
- .dtsi (Device Tree Source Include):通常用于描述 SoC 内部通用的硬件资源,例如 CPU 核、I2C/SPI 控制器等。这类文件作为父级模板,会被多个具体的板级文件所共享引用。
- .dts (Device Tree Source):描述具体开发板的硬件信息,比如板载传感器、LED、接口配置等。这个文件是最终被编译成
.dtb(设备树二进制文件)的入口文件。
1.2 确定目标文件
如何找到我们要修改的那个 .dts 文件呢?这里有三种常见且有效的方法。
1.2.1 运行时查询
在开发板的 Linux 系统终端中,执行以下命令可以获取当前设备树的 model 属性:
$ cat /sys/firmware/devicetree/base/model
Orange Pi 5 Pro
# 或者使用另一个等效路径
$ cat /proc/device-tree/model
Orange Pi 5 Pro
获取到字符串(例如 Orange Pi 5 Pro)后,在内核源码的 dts 目录下使用 grep 命令搜索该字符串,通常就能定位到具体的 .dts 文件。
例如,在 arch/arm64/boot/dts/rockchip/rk3588s-orangepi-5-pro.dts 文件中,我们找到了匹配的 model 属性定义:
/ {
// 匹配 model 属性
model = "Orange Pi 5 Pro";
compatible = "rockchip,rk3588s-orangepi-5-pro", "rockchip,rk3588";
/delete-node/ chosen;
...
};
1.2.2 查阅 Bootloader 环境变量
如果你能进入 U-Boot 命令行,检查 fdtfile 环境变量是一个直接的方法:
printenv fdtfile
命令执行后可能会返回类似 rockchip/rk3588s-orangepi-5-pro.dtb 的值。这个值就是系统启动时加载的 .dtb 文件名,其对应的 .dts 源码文件通常与之同名(扩展名不同)。
1.2.3 检查编译配置
查看你所使用的构建系统(如 Yocto、Buildroot、Armbian)的配置文件,确认相关变量的设置。以下是常见构建系统的典型设置示例:
- Buildroot 配置文件
orangepi_5_pro_defconfig:
BR2_LINUX_KERNEL_INTREE_DTS_NAME="rockchip/rk3588-orangepi-5-pro"
- Yocto 配置文件
orangepi-5-pro.conf:
KERNEL_DEVICETREE = "rk3588s-orangepi-5-pro.dtb"
- Armbian 配置文件
orangepi5pro.csc:
BOOT_FDT_FILE="rockchip/rk3588s-orangepi-5-pro.dtb"
1.3 修改原则
修改设备树有一条重要的工程最佳实践:尽量通过引用和覆盖已有配置,而不是直接修改原始配置文件。
具体来说,应尽量避免直接修改 SoC 厂商提供的 .dtsi 文件。正确的做法是在板级 .dts 文件中,通过引用节点标签(&label)的方式,对特定节点的属性进行覆盖或添加。
例如,i2c0 节点在 .dtsi 中默认可能是禁用的,我们应该在板级 .dts 中这样修改:
// 在板级 dts 文件的根节点或合适位置引用
&i2c0 {
status = "okay"; // 覆盖父级(.dtsi)中的 `disabled` 状态
// 添加板级特定的设备节点或配置
pinctrl-names = "default";
pinctrl-0 = <&i2c0m2_xfer>;
};
2. 驱动匹配与加载机制
理解设备树如何工作的关键在于掌握内核的解析流程:内核是如何解析 .dtb 二进制文件,并将设备树中的节点与对应的驱动程序绑定起来的?
下面的流程图清晰地展示了从设备树描述到驱动 probe 函数被调用的完整逻辑链路。
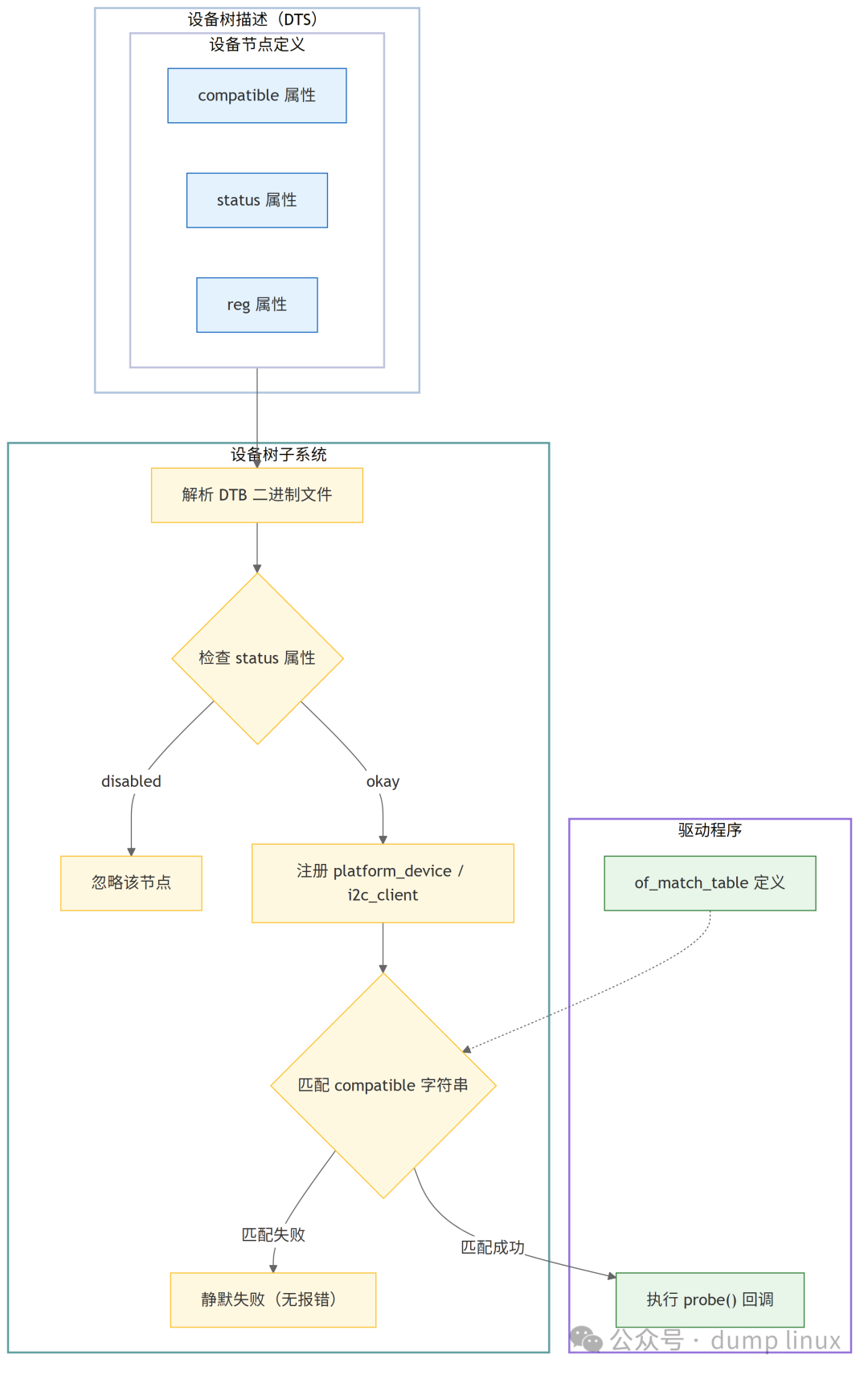
内核通过驱动程序中的 of_match_table 结构体,与设备树节点里的 compatible 属性字符串进行精确匹配。只有当匹配成功,并且该节点的 status 属性处于可用状态时,内核才会创建相应的设备结构体,并最终调用驱动程序的入口函数(probe)。
3. 核心属性详解
3.1 status
status 属性用于定义设备的启用状态,是内核决定是否为该节点创建设备结构体的首要依据。
status = “okay”:设备启用,内核将尝试为其绑定驱动。status = “disabled”:设备被禁用,内核在解析时会完全忽略该节点及其所有子节点。
注意事项:
- 父节点状态优先:如果父节点(例如一个总线控制器)的
status 是 disabled,那么其下所有的子节点都会被递归忽略,无论子节点自身的 status 如何配置。
- 按需启用:SoC 厂商提供的
.dtsi 文件中,许多节点的 status 默认就是 disabled。在板级 .dts 中引用它们时,必须显式地声明 status = “okay”。
- 拼写检查:属性名拼写错误(例如写成
statuss)将导致该配置完全失效,而设备树编译器通常不会对此报错,排查起来非常困难。
3.2 compatible
compatible 属性是驱动与设备绑定的唯一关键标识符。设备树中定义的字符串,必须与驱动程序代码里 of_device_id 表中的定义完全一致(包括标点符号)。如果不匹配,内核会静默忽略该设备,不会产生任何错误日志,这是驱动无法加载的最常见原因之一。
语法示例:
/ {
gpu_panthor: gpu-panthor@fb000000 {
compatible = "rockchip,rk3588-mali", "arm,mali-valhall-csf";
}
};
工作原理:
内核的总线子系统会将设备树 compatible 属性中的字符串列表,与驱动程序 of_device_id 表里的 compatible 字段逐一比对。该属性支持字符串数组,提供了从具体到通用的回退机制。如果驱动不支持第一个具体的型号(如 ”rockchip,rk3588-mali”),内核会继续尝试匹配后续更通用的型号(如 ”arm,mali-valhall-csf”)。
3.3 reg
reg 属性用于定义设备的地址资源,但其具体含义完全取决于设备所属的总线类型。
- Platform 设备:表示
MMIO(内存映射I/O)的物理内存基地址和长度。例如 reg = <0x0 0xfb000000 0x0 0x200000>。这里出现4个值,是因为父节点指定了 #address-cells = <2> 和 #size-cells = <2>,分别组合成了64位地址和64位长度。
- I2C 设备:表示7位从机地址(例如
reg = <0x51>)。注意,这里应该只写7位有效地址,不包含读写位。
- SPI 设备:表示片选编号(例如
reg = <0>)。
设备树节点名中 @ 后面的地址(如 gpu-panthor@fb000000)应与 reg 属性中的地址部分保持一致。
3.4 interrupts
该属性用于配置设备的中断资源,通常需要关联中断源和中断控制器。
语法示例:
hym8563: hym8563@51 {
compatible = "haoyu,hym8563";
reg = <0x51>;
...
interrupt-parent = <&gpio0>; // 显式指定中断控制器
interrupts = <RK_PB0 IRQ_TYPE_LEVEL_LOW>; // 引脚编号和触发类型
status = "okay";
};
注意事项:
- Cell 规则:
interrupts 属性的具体编码(每个中断占用几个数值单元cell,每个cell代表什么)由所引用的中断控制器节点中的 #interrupt-cells 属性决定。下文 #interrupt-cells 小节会详细解释。
- 指定父节点:
interrupt-parent 可以显式指定中断控制器。如果不写,内核会沿着设备树父节点向上查找。但在使用 GPIO 中断或自定义中断控制器时,最好显式指定以避免歧义。
- 触发类型位置:触发类型(如
IRQ_TYPE_LEVEL_LOW)是 interrupts 属性中的一个 cell,其具体位置取决于 #interrupt-cells 的定义,不要主观假定。
多中断示例:
当一个设备有多个中断时,可以在 interrupts 属性中分别定义,并为每个中断起一个名字(interrupt-names),方便驱动程序引用。
gpu_panthor: gpu-panthor@fb000000 {
compatible = "rockchip,rk3588-mali", "arm,mali-valhall-csf";
reg = <0x0 0xfb000000 0x0 0x200000>;
interrupts = <GIC_SPI 92 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 93 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 94 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "job", "mmu", "gpu";
status = "disabled";
}
3.5 gpios
该属性用于描述设备引用的 GPIO 引脚资源及其初始电平状态。
语法示例:
&pcie2x1l2 {
reset-gpios = <&gpio3 RK_PD1 GPIO_ACTIVE_HIGH>;
status = "okay";
};
属性解析:
&gpio3:GPIO 控制器的句柄引用。RK_PD1:该 GPIO 控制器下的具体引脚编号。GPIO_ACTIVE_HIGH:电平极性标志,表示高电平时逻辑有效。
注意事项:
- 后缀自动处理:Linux GPIO 子系统会自动处理
-gpios 后缀。例如,设备树中定义为 reset-gpios,在驱动中调用 devm_gpiod_get(dev, “reset”, …) 即可获取。如果传入全名 ”reset-gpios”,反而会导致查找失败。
- 极性标志影响:
GPIO_ACTIVE_HIGH/LOW 直接影响驱动层的逻辑电平。如果配置为低电平有效(GPIO_ACTIVE_LOW),当驱动设置逻辑 1 时,物理引脚实际输出的是低电平。
3.6 pinctrl
pinctrl 属性用于配置 SoC 引脚的复用功能(例如,将某个引脚配置为 GPIO、I2C_SDA 或 SPI_MOSI)及其电气特性(如上拉、下拉电阻,驱动能力)。
语法示例:
i2c0: i2c@fd880000 {
compatible = "rockchip,rk3588-i2c", "rockchip,rk3399-i2c";
reg = <0x0 0xfd880000 0x0 0x1000>;
pinctrl-names = "default"; // 定义引脚状态名
pinctrl-0 = <&i2c0m0_xfer>; // 引用具体的引脚配置节点
};
属性解析:
pinctrl-names:定义引脚状态列表,最常用的是 ”default”。内核在加载驱动时,会自动将引脚切换到 default 状态对应的配置。pinctrl-0:引用具体的引脚配置节点。这里的 &i2c0m0_xfer 通常在 SoC 级的 pinctrl.dtsi 文件中定义。
功能:
- 决定引脚“身份”:一个物理引脚可能具备多种功能,
pinctrl 配置决定了它当前作为哪种外设接口使用。
- 稳定电气状态:通过设置内部上拉/下拉电阻,可以防止引脚在未被驱动时处于浮空状态,从而提高系统抗干扰能力。
- 引用而非计算:在板级
.dts 中,我们通常只需要引用(使用 & 符号)厂商在 .dtsi 中已经定义好的 pinctrl 配置节点,而无需手动计算复杂的寄存器数值。
3.7 clocks
clocks 属性用于定义设备正常工作所需的时钟源。内核的时钟子系统会根据此描述为设备分配并使能相应的时钟。
语法示例:
i2c0: i2c@fd880000 {
compatible = "rockchip,rk3588-i2c", "rockchip,rk3399-i2c";
reg = <0x0 0xfd880000 0x0 0x1000>;
clocks = <&cru CLK_I2C0>, <&cru PCLK_I2C0>; // 引用时钟控制器和时钟ID
clock-names = "i2c", "pclk"; // 为时钟资源命名
}
属性解析:
clocks:引用时钟控制单元(如 &cru)提供的具体时钟节点,包含控制器句柄和时钟 ID。clock-names:为每个时钟资源赋予一个名字,方便驱动程序通过 devm_clk_get(dev, “i2c”) 这样的接口获取特定的时钟。- 在驱动中,开发者需要调用
devm_clk_get() 和 clk_prepare_enable() 来获取并使能时钟。
功能:
- 按需供电原则:Linux 内核默认遵循此原则。如果设备树中未定义时钟,或驱动未主动开启时钟,对应的硬件模块可能处于断电或关断状态以节省功耗。
- 精确频率控制:对于 UART、SPI 等需要精确波特率或时钟频率的外设,通过设备树关联时钟树,内核可以自动计算并配置分频器参数。
3.8 cells 属性族
在设备树中,所有涉及数值列表的属性(如 reg, interrupts),其数据的长度和含义都由父节点(或被引用节点)中定义的 *-cells 属性决定。设备树中的数值以 32 位整型(u32)为基本单位,每个单位称为一个 Cell。
3.8.1 #address-cells 与 #size-cells
这两个属性定义在父节点(通常是总线控制器,如 soc、i2c0)中,用于规定其所有子节点在描述 reg 资源时必须遵守的格式。
#address-cells:指定子节点 reg 属性中,起始地址部分占用多少个 Cell。#size-cells:指定子节点 reg 属性中,地址空间长度部分占用多少个 Cell。
详细说明:
- 64位地址空间:在 ARM64 架构中,外设的物理地址空间往往超过 32 位。此时,父节点(如
axi 总线)会设置 #address-cells = <2>; 和 #size-cells = <2>;。这意味着子节点的 reg 必须提供 4 个 u32 数值,前两个组合成 64 位起始地址,后两个组合成 64 位长度。
- I2C/SPI 总线:由于 I2C 从机地址通常只有 7/10 位,且访问不涉及内存映射的长度概念,因此 I2C 控制器节点通常设置
#address-cells = <1>; 而 #size-cells = <0>;。这使得挂载在其下的设备(如传感器)的 reg 属性只需一个数值表示从机地址。
语法示例:
/ {
compatible = "rockchip,rk3588";
#address-cells = <2>; // 根节点下,地址用2个cell表示
#size-cells = <2>; // 长度也用2个cell表示
gpu_panthor: gpu-panthor@fb000000 {
compatible = "rockchip,rk3588-mali", "arm,mali-valhall-csf";
// 父节点(根)指定了 cells 为 2-2,因此 reg 是 <地址1 地址2 长度1 长度2>
reg = <0x0 0xfb000000 0x0 0x200000>;
}
i2c0: i2c@fd880000 {
compatible = "rockchip,rk3588-i2c", "rockchip,rk3399-i2c";
reg = <0x0 0xfd880000 0x0 0x1000>;
#address-cells = <1>; // I2C总线下,子设备地址用1个cell
#size-cells = <0>; // 无长度概念
};
};
// 引用 i2c0 总线,并添加子设备
&i2c0 {
vdd_cpu_big0_s0: vdd_cpu_big0_mem_s0: rk8602@42 {
compatible = "rockchip,rk8602";
// 父节点 i2c0 指定了 cells 为 1-0,因此 reg 只需1个cell表示I2C地址
reg = <0x42>;
};
};
3.8.2 #interrupt-cells
该属性定义在中断控制器节点(如 GIC、GPIO 控制器)中,用于告知内核:描述该控制器下的一个具体中断,需要多少个 Cell 的参数。
当设备节点通过 interrupt-parent 引用某个中断控制器时,其 interrupts 属性所包含的参数个数,必须严格等于该控制器节点中 #interrupt-cells 声明的值。
常见标准配置:
- GIC (通用中断控制器):通常设为
<3>。三个 Cell 的含义通常固定为:<中断类型 中断号 触发电平标志>。
- GPIO 控制器:通常设为
<2>。两个 Cell 的含义通常为:<引脚编号 触发电平标志>。
语法示例:
gic: interrupt-controller@fe600000 {
compatible = "arm,gic-v3";
#interrupt-cells = <3>; // GIC需要3个参数描述一个中断
interrupt-controller;
}
gpio0: gpio@fd8a0000 {
compatible = "rockchip,gpio-bank";
reg = <0x0 0xfd8a0000 0x0 0x100>;
gpio-controller;
interrupt-controller;
#interrupt-cells = <2>; // GPIO中断需要2个参数
};
hym8563: hym8563@51 {
compatible = "haoyu,hym8563";
reg = <0x51>;
interrupt-parent = <&gpio0>; // 引用gpio0作为中断控制器
// 父节点 gpio0 指定了 #interrupt-cells = <2>,因此这里提供2个参数
interrupts = <RK_PB0 IRQ_TYPE_LEVEL_LOW>;
};
重要提示: 如果 interrupts 属性的 Cell 数量与控制器定义的 #interrupt-cells 不符,内核在启动解析 DTB 时就会失败,导致驱动程序中的 platform_get_irq() 或 devm_request_irq() 调用返回错误。
4. 调试与验证
为确保设备树配置正确生效,建议采用以下标准验证流程:
1. 运行时结构检查
利用 Linux 的 /proc 文件系统,直接查看内核实际加载的设备树结构,确认字段值是否符合预期。
# 由于字符串之间以空字符(\0)分隔,直接 cat 可能导致显示粘连
$ cat /proc/device-tree/gpu-panthor@fb000000/compatible
rockchip,rk3588-maliarm,mali-valhall-csf
# 配合 tr 命令,用换行符替换空字符,可以清晰查看
$ cat /proc/device-tree/gpu-panthor@fb000000/compatible | tr '\0' '\n'
rockchip,rk3588-mali
arm,mali-valhall-csf
2. 反编译验证
使用设备树编译器(dtc)工具,将系统启动时加载的二进制 DTB 文件反编译为文本格式的 DTS。这有助于排查在编译过程中,宏展开或文件覆盖可能产生的问题。
# 将 dtb 反编译为 dts 文本
dtc -I dtb -O dts -o orangepi-5-pro.dts /boot/dtb/rockchip/rk3588s-orangepi-5-pro.dtb
3. 驱动加载追踪
在驱动程序的 probe() 函数入口处添加内核日志打印(如 dev_info()),这是判断驱动与设备树匹配是否成功的最直接、最可靠的手段。
5. 总结
设备树作为硬件描述语言,是连接硬件平台与 Linux 内核的桥梁。确保 status、compatible、reg、interrupts 等关键属性的准确性,是驱动开发工作的基石。任何配置上的疏漏,都可能导致内核完全忽略相关设备,使得精心编写的驱动程序根本没有执行初始化的机会。
希望这篇关于设备树核心属性与配置实践的详解,能帮助你更高效地进行嵌入式 Linux 驱动开发。如果在实践中遇到其他问题,欢迎来到 云栈社区 与更多开发者交流讨论。
 发表于 2026-2-12 07:32:03
|
查看: 316|
回复: 0
发表于 2026-2-12 07:32:03
|
查看: 316|
回复: 0
